
個人用知的移動体におけるヒューマントレーサの実装
1 はじめに
情報端末が常にユーザの近くに存在する、ユビキタスネットワーク社会が近い将来実現されると予想される。そこで我々は、ユーザが情報端末を持ち歩くのではなく、情報端末がユーザとともに移動するというコンセプトに基づいて、ATと呼ばれる個人用知的移動体を開発している。しかし、ユーザは常に移動体に搭乗しているわけではなく、移動体から降りて行動をすることも考えられる。本研究では、ユーザが移動体に搭乗していないときでも情報的にリンクしている状態を維持するために、赤外線タグとPSD測距センサーを用いた、ユーザの後方を追跡するヒューマントレーサを実装した。応用例としては、移動を伴った作業を行う工場における、作業を補助するためのアシスタントエージェントなどが考えられる。
2 個人用知的移動体AT
AT (Attentive Townvehicle)は、搭乗者である人間や、自分を取り巻く環境に適応し、 個体間通信によって協調的に動作することが可能な個人用の乗り物である。ATプロジェクトでは、バリアフリーを実現する生活手段、また周りの環境や他のAT間における情報通信処理の基盤の構築を目指して開発研究を行っている。本研究のほかにもRFタグを用いた環境との情報の送受信や、蓄積された体験記録をもとにした追体験支援システムの開発など様々な研究が行われている。
3 ヒューマントレーサ
ユーザを追跡するシステムの研究は、これまでにも多数存在する。画像処理によってユーザを示す領域を切り出す手法や、電波を用いて追跡を実現する手法など、その方法は様々である。しかし、これらの手法は、追跡するべきユーザを識別できない、追跡するべきユーザの動的な変化に対応できないといった問題点があった。これらの問題点を解決するために、本研究では赤外線とPSD測距センサーを組み合わせたシステムを実装した。
3.1 赤外線タグ
赤外線タグは、ユーザを特定することのできる8ビットのIDを、タグ上の赤外線LEDから送信する装置である。ユーザは、この赤外線タグを身に着けることによって、ATに自分のいる位置を知らせることができる。この赤外線タグは小型なので、身に着けることによってユーザの行動を阻害することは無い。
3.2 PSD-IRアレイ
ATには赤外線タグから発信された赤外線を受信する受信部と、前にある物体との距離を測定するPSDセンサから構成される図のような受信デバイス(PSD-IRアレイ)が搭載されている。このデバイスには、赤外線受信素子とPSDセンサが1つの組として、前方の8方向に取り付けられている。このデバイスにより、ユーザの識別・追跡を可能にしている。

図1: PSD-IRアレイ
3.3 ユーザの位置の推定
以下にユーザの追跡の手法を示す。赤外線タグから発信されたIDは、PSD-IRアレイ内の赤外線受信部で受信され、受信したIDとどの受信部で受信したのかを示す番号が1つの組として制御部に渡される。このときの問題点として、赤外線タグは1秒間に数十回ほどの割合でしかIDを送信することができず、IDの受信されない空白の時間が生じてしまい、タグを見失ったとみなしてしまう点がある。このような問題点を解決するために、8つの赤外線受信部すべてに対してデータの寿命を与え、寿命が残っていればその受信部で受信したIDは有効だとみなすという手法を用いた。具体的な手順を以下に示す。
-
制御部内で、受信したIDとその寿命を8つの受信部ごとに管理するリストを用意する。
-
IDを受信するたびに、受信した赤外線受信部におけるIDの寿命をのばす。
-
ある一定時間の間隔でリストを調べ、寿命の残っているIDはそのまま保持し、寿命の切れたIDは無効にする。
このようにして得られるリストを用いることによって、ユーザのいる方向を推定する。また、PSDセンサーによってその方向にある対象との距離を測定することでユーザとの距離とする。そのとき、図の点線部分のように、反射などの物理現象によって同一のIDを複数の赤外線受信部が同時に受信してしまう可能性がある。そのときは有効な方向すべてに対して対象との距離を測定し、その距離がもっとも近い方向がユーザのいる方向としている。
3.4 ユーザの追跡
ATの移動は、左右の旋回速度、前進・後退の速度の2つのパラメータを指定することによって行われる。したがって、赤外線タグから発信されたIDをどの方向の赤外線受信部が受信したかによって前者のパラメータを決定し、その方向に対応したPSDセンサの測定値によって後者のパラメータを決定する。また、何らかの原因によって追跡中にIDが取得できなくなったときは、その場に停止し目標のIDを再び受信するまで待機する。具体的にはユーザが赤外線を受信できない範囲にいたときや、ユーザとの間に障害物が現れたときなどが想定される。
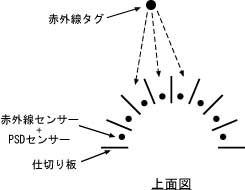
図2: IDの受信方向の推定
3.5 複数のユーザによる利用
複数のユーザが1台のATを使用するとき、追跡するべき相手が動的に変化することが考えられる。このとき、ユーザには、追跡することのできるユーザのリストが提示されており、このリストの中から次に追跡するべきユーザのIDを選択することによって、ユーザの動的な変化に対応することができる。また、リスト中のIDを持つ複数のユーザ間において、優先度を設定することができ、複数のIDを同時に受信したときは、優先度の高いユーザを追跡する。そして、それまで追跡していたユーザからIDが取得できなくなったときは、その次に優先度の高いユーザを追跡する。
4 今後の課題
ヒューマントレーサの今後の課題として挙げられるものを以下に示す。
-
個人適応による追跡精度の向上
人間の歩行の速度やリズムなど歩行に関するパラメータは個人によって異なる。現在のシステムでは、決められた動作しかできないが、このようなパラメータを個人に適応して変化させるような仕組みにする必要がある。
-
行動履歴の取得・利用
ATに搭載されたGPSやカメラなどによって自動的にユーザの行動履歴を、さらに、アドホックネットワークを用いた、他者や周りの環境とのインタラクションの履歴も取得することができる。本システムを用いることによって、搭乗しているときしか取得できなかったこれらのデータが、搭乗していないときでも取得することが可能になる。こうして取得した行動履歴の利用例として、ユーザの体験記憶補助や行動パターンのモデル化などが挙げられる。