
個人用知的移動体における人間と移動体の高度なインタラクションに関する研究
概要
筆者の所属する研究室では、物理的・情報的にバリアフリーな社会を実現するための基盤技術として、AT (Attentive Townvehicle)と呼ばれる、情報技術によって強化された個人用知的移動体を研究・開発している。ATは、搭乗者である人間や、AT自身を取り巻く環境に適応し、移動体間通信を行うことによって様々なインタラクションを実現することができる。特に、移動体を利用する人間とのインタラクションは必要不可欠なものであると考えられる。身体的な問題をかかえる障害者や高齢者を対象とした感覚補助機能やインタフェースの開発、個人適応による操作性の向上や嗜好に合った情報の抽出など、人間とのインタラクションに関する研究は数多く存在する。
しかし、人間は常に移動体に搭乗して行動するわけではなく、その目的や状況に応じて、移動体から降りた状態で行動をすることもあり、移動体は自身のもつ機能を十分に活かすことができない可能性がある。このような問題点を解決するために、本研究では、非搭乗時におけるATと人間とのインタラクションを実現する技術として遠隔操作システムと、ヒューマントレーサと呼ばれる人間の自動追尾システムを提案する。
遠隔操作システムでは、車体の操作だけでなく、ATに搭載されたカメラからの映像を参照することで、遠隔地に関する情報を詳しく知ることができる。また、ヒューマントレーサでは、固有のIDを発信する赤外線タグと呼ばれる装着デバイスと、ATに搭載されたPSD-IRアレイと呼ばれるセンサーデバイスによって、特定のユーザの追尾を実現している。また、これらの技術を用いることによって可能となる非搭乗時におけるインタラクションの応用についても考察を行った。
1 はじめに
情報化社会の到来により、様々な情報サービスが提供されるようになっている。このような社会における重要な課題の一つとして、日常的な生活と情報サービスをどのようにして密接に結びつけるかということが挙げられる。この問題に対する対処法の一つとして、モバイルコンピューティングと呼ばれる技術がある。しかし、モバイルコンピューティングの前提となる情報端末の小型化や高性能化が進んでも、人間の行動と情報を密接に結びつけることには限界があると思われる。たとえば、携帯電話はメールの送受信や、簡易的なスケジュール管理を行うことができるが、それを人間の行動に直接反映させることはできない。メールを受信してもその内容を表示することしかできないし、行動を開始する予定時刻が来てもアラームを鳴らすことぐらいしかできず、それを人間が実行するかどうか、実行したかどうかを知る手段はない。
そこで、筆者の所属する研究室では、日常的な生活と情報をより密接に結びつけるために、人間が情報と一体となって行動することを目指している。日常の生活を構成する基本的で重要な要素の一つとして移動に着目し、個人用の移動体を情報通信技術を用いて強化する、いわば搭乗型コンピューティング(Mountable Computing)というコンセプトのもと、AT (Attentive Townvehicle)と呼ばれる個人用知的移動体を研究・開発している。情報通信技術によって、人間・環境・移動体という要素間の関係を形成し、全体としての大きなまとまりを構成していくのである。また、それぞれの関係は、互いに独立したものではなく、相互に関連性を持つ。このようなコンセプトの利点として、常に情報世界にアクセスでき、また情報世界からのフィードバックを反映することのできるプラットホームが整えられることが挙げられる。つまり、人間が意識せずとも自分の生活に必要な情報を探し当てることができ、さらに情報内容を行動に直接的に反映させることでより有意義に活動することができる。
人間の生活と情報を結びつける手段として移動体を用いる上で問題となるのは、人間は常に移動体に乗って行動を行うわけではないということである。たとえば、買い物を想定すると、店までは移動体に乗って移動するが、実際に商品を見たり、手に取ったりするときは移動体から降りて行動するだろう。このように、移動体は人間が搭乗していないとき、自身の持つ機能を十分に活かすことができない可能性がある。
したがって、人間の行動と情報をより密接に結びつけるためには、人間が搭乗していない場合にも移動体とのインタラクションが可能な仕組みの実現が必要となる。そこで、そのための基盤技術として遠隔操作システムとヒューマントレーサと呼ばれる人間の自動追尾システムを提案する。様々なセンサー類を搭載したATを遠隔操作することによって、遠隔地に関する情報をインタラクティブに取得することが可能となる。また、自動追尾を行うことによって、人間は特に意識することなく、移動体を介して情報世界とのコネクションを維持することが可能となる。また、本論文では、これらの技術を基盤として実現できるであろう様々な応用例についても考察を行った。
以下に本論文の構成を示す。第2章では個人用知的移動体ATのシステム構成、第3章ではATによって実現されるインタラクションを環境とAT、複数のAT間、人間とATの3つの視点から述べる。第4章では、第3章で示したインタラクションのうち、非搭乗時における人間とのインタラクションを実現するための技術について述べる。第5章では、第4章で示した技術を用いることで可能となる応用例を挙げる。第6章では、関連研究について述べる。最後の第7章では、まとめと今後の課題について述べる。
2 個人用知的移動体AT
AT (Attentive Townvehicle)は、搭乗者である人間や、自分を取り巻く環境に適応し、 個体間通信によって協調的に動作することが可能な個人用の乗り物である。本研究のほかにもRFID (Radio Frequency IDentification)タグを用いた、位置や時間などの状況と個人の嗜好や興味に依存した情報取得や、自動的に蓄積された行動記録をもとにした追体験支援システムなど様々な研究が行われている。
2.1 ATを構成するセンサー・デバイス
筆者の所属する研究室では、平成15年より知的移動体のプロトタイプとして、複数台のATを試作している(図)。ATには様々なセンサー・デバイスが搭載されている。具体的には、傾斜角度センサー、3軸角度センサー、超音波センサー、圧力センサー、GPSレシーバー、カメラ、RFIDタグリーダーである。
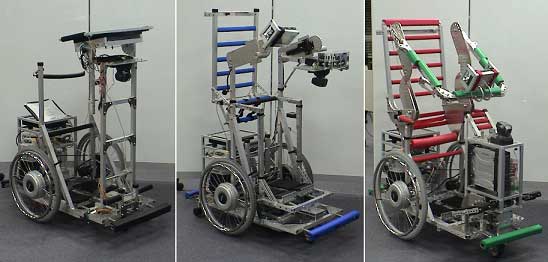
図2.1: ATs (Attentive Townvehicles)
AT全体のシステム構成図は図のようになる。ATの制御を行うためにモーター制御用PC、走行モード制御及びネットワーク制御用PC(以下では通信用PC)、コンソール用PCの3台のPCを用いている。それぞれのPCの役割を以下に示す。
-
モーター制御用PC
ペダルに装着された傾斜角度センサーから取得したパラメータや、通信用PCから受信したパラメータなどに基づいてモーターの制御を行う。また、センサーから取得した情報を通信用PCに送信する。
-
通信用PC
コンソール用PCとアプレットを介して、コンソールに表示する情報の送信やカメラ操作に関するコマンドの受信など、ATの様々なモードに関わる処理を行う。また、無線アドホックネットワークミドルウェアを介して、他のATの発見などネットワークに関する処理を行う。
-
コンソール用PC
ATとユーザとのインタラクションを行うためのインタフェースを提供する。具体的には、ペダルの角度や速度といった走行に関する情報の提示、ペダル操作によるマニュアル走行や、遠隔操作、他のATとの協調走行といった走行モードの切り替えなどが挙げられる。
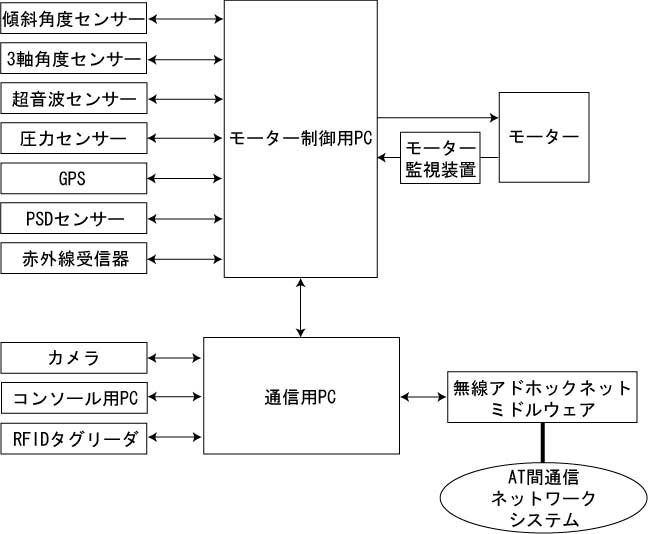
図2.2: ATのシステム構成図
本研究では、自動追尾を行うために、追尾するべきユーザのIDを受信する赤外線受信器と、追尾するユーザとの距離を測定するPSD (Position Sensitive Detector)測距センサーを追加した。センサー・デバイスに関してまとめたものを表に示す。なお、表中の(※)は本研究にて新たに搭載したものである。
|
センサー・デバイス名 |
使用目的 |
|---|---|
|
傾斜角度センサー |
ペダルの踏み込み角度を測定する |
|
3軸角度センサー |
車体の傾斜角や回転角を測定する |
|
超音波センサー |
前方・後方に存在する障害物を検知する |
|
圧力センサー |
ペダルに足が置かれているかどうかを検出する |
|
モーター監視装置 |
速度や移動距離などを検出する |
|
GPSレシーバー |
車体の現在位置を取得する |
|
赤外線受信器(※) |
赤外線信号によるIDを受信する |
|
PSD測距センサー(※) |
近距離における対象物との距離を測定する |
|
カメラ |
映像を取得する |
|
RFIDタグリーダー |
環境に埋め込まれたRFIDタグの情報を取得する |
2.2 システム構成
2.2.1 走行制御システム
ATの基本的な走行制御は左右のペダルを傾けることで行う。このため、左右のペダルには踏み込まれた角度を測定するために傾斜角度センサーが装備されており、左右の踏み込みの角度によって速度や進行方向を決定する。ここで、坂道を登るとき車体全体が傾くと、ペダルを踏み込んだのか車体が傾いているのかを区別する手段が必要となる。そこで、ペダルの傾斜角度センサーとは別に、3軸角度センサーを装備している。このセンサーでpitchを測定し、ペダルの角度センサーの値から差し引くことによって、斜面での走行を可能にしている。また、この3軸角度センサーは、pitchの他にもyawやrollを測定することができ、自律走行における車体の方向を推定することができる。また、モーターの回転を監視する装置が搭載されており、速度や走行距離、車輪の回転方向を検出している。
この他にも、前方の障害物を検出し衝突回避をするための超音波センサーや、回避できなかった衝突を検出するための、PSD測距センサーを内蔵したバンパーが装備されている。また、走行制御のためのセンサーだけでなく、ATの位置を知るためのGPSレシーバー、物理的環境に設置されたRFIDタグを認識するためのRFIDタグリーダーが装備されている。
2.2.2 ネットワークシステム
移動体における通信の特徴として、ネットワーク構成の動的な変化が挙げられる。アクセスポイントを用いた無線LANネットワークを構成する場合、複数の無線LANのカバーエリアをまたぐ移動に伴うネットワークの再構成を行わなければならない。また、カバーエリアを広げるためにアクセスポインタなどのインフラを設置しなければならず、膨大なコストがかかってしまう問題がある。このような問題点を解決するための手段としてアドホックネットワークが挙げられる。特徴として、アクセスポイントのようなインフラを使わないので、無線の有効範囲内という限られた空間においてネットワークを構築することが挙げられる。つまり、自分を中心とする限定された範囲内におけるネットワークのノードを検出することができる。したがって、アドホックネットワークは、ある物理的な場所を共有するコミュニティを形成するのに非常に適しているといえる。
AT間における通信では、モバイルエージェントシステムをベースとしたミドルウェアであるcogma (COoperative Gadgets for Mobile Appliances)を使用している。cogmaではCodgetと呼ばれるモバイルエージェントが、ネットワークのノード上に存在するエージェントシステム(CogManagerと呼ばれる)間を移動することによって、相互の通信を可能にしている。
3 ATにおけるインタラクション
前章で述べたように、ATは、自身に搭載されたセンサー類や、アドホックネットワークを用いた通信を行うことにより、環境や他のAT、人間とのインタラクションを可能にしている。具体的な実現例を図に示す。本章では、これらのインタラクションについて述べる。
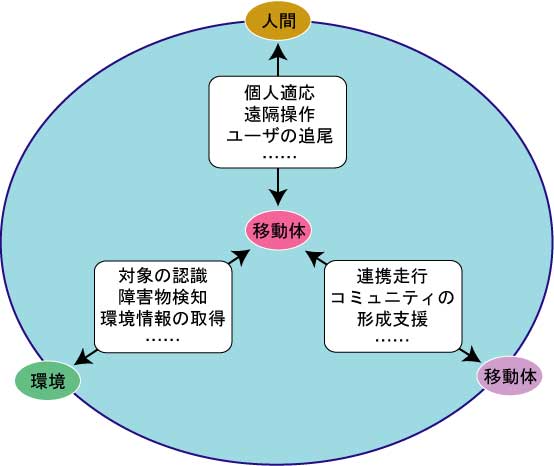
図3.1: ATにおけるインタラクション
3.1 環境とのインタラクション
ATにおける環境とは、物理環境(実世界)と情報環境(情報世界)の2つの意味を持つ。物理環境へのアクセス方法としては、超音波センサーやPSD測距センサー、環境に埋め込まれたRFIDタグを読み取るためのRFIDタグリーダーなどのセンサー類が挙げられる。これらのセンサー類を用いることによって、障害物を検知し、ユーザにその存在を知らせることが可能になる。
また、情報環境とのインタラクションの手段として無線アドホックネットワークを用いている。インターネットなどのグローバルネットワークと異なり、多数の端末をアクセスポイントの介在なしに相互に接続することで、インフラを持たない場所で容易にネットワークを構築できるのがアドホックネットワークの特徴であるが、ここで注目するべき点は、物理的に限定された領域内でのネットワークを構築するという点である。このような特徴を活かすことで、場所に依存したコミュニティの形成やサービスの提供を可能にする。
ここでは環境とのインタラクションの具体例として、赤外線タグを用いた物理対象の認識と、RFIDタグを用いた、位置と連動した情報コンテンツの利用について述べる。
3.1.1 実世界における物理対象の認識
情報端末が、実世界における物理対象を認識することによって、人間が気づかなかった情報を取得したり、人間がどのような対象に興味を持ったかを知ることができる。このような情報を用いることによって、人間に新たな興味を持たせるきっかけを与えたり、人間の嗜好に適した情報の提示といった高度なインタラクションを実現できる。また複数の人間が、認識された対象に新たな情報を付与し、その情報を共有することによって、対象物の物理的な検索といった応用を実現できる。このように、実世界における物理対象を認識することは物理環境と情報環境を結びつける上で非常に有用である。
ATでは、実世界対象の認識として、カメラや赤外線タグと呼ばれる小型装置とその受信器を用いたシステムを実現している。このシステムでは、対象に貼り付けられた赤外線タグから発信される赤外線のIDによって対象物を特定し、さらにカメラ映像の画像処理によって対象物の位置を推定する。また、このIDをインデックスとしてデータベースにアクセスすることによって、その対象に関する情報を取得することも可能である。
3.1.2 場所に連動した情報コンテンツの利用
近い将来実現されるだろうと予想されるユビキタスネットワーク社会では、時間や場所に依存しない情報へのアクセスを目指している。利用可能な情報が多ければ多いほど、より高度なサービスを期待することができる。しかも、それらの情報をユーザが特に意識することなく必要なものだけ取得することができれば、ユーザにとって非常に有益であると予想される。そこで、実環境に依存した情報に関連付けられたRFIDタグ(非接触・無電源のIDタグ)を環境の様々な場所に埋め込み、それをATに搭載されたRFIDタグリーダーで自動的に認識させることで、情報を取得するシステムを提案・実装している。しかし、無闇に情報を取得し続けると情報量が膨大になり、ユーザにとって本当に有益な情報を選択することが困難になる。そのため、ユーザの嗜好や興味などを記述したプロファイルをATが自動的に管理・適用することで、ユーザにとって真に有益な情報を選択することができる。
3.2 AT間のインタラクションと協調動作
3.2.1 連携協調走行
移動体間通信を用いることで様々な協調動作を実現することが可能となる。具体的には、自分の位置や速度を他のATに伝達することで、事前に接近を察知し衝突を回避するための安全走行支援や、複数台のATによる非同期連携走行、たとえば、先頭の有人のATを無人のATが追尾する半自律走行を実現している。
3.2.2 コミュニティの形成支援
ATは、アドホックネットワークの仕組みを用いて、自分を中心とした一定範囲内に存在する他のATを認識し、コミュニケーションを行うことができる。このとき、ATが管理しているユーザプロファイルを相互に交換・照合することによって、趣味が似ていたり、お互いの目的が関連している他のATユーザの存在を提示する。提示される情報をもとに、ATを介したユーザ間のメッセージ伝達を行うことで動的なコミュニティの形成を支援する。また、このようにして形成されたアドホックなコミュニティは協調走行や任意の時点でのユーザの参加・離脱を繰り返すことにより、柔軟なコミュニティ形態をとることが可能である。
3.3 人間とのインタラクション
ATは、移動体としての開発だけではなく、物理環境や情報環境を結びつけるプラットホームの設計・実装も視野に入れている。その中において、人間の行動という物理的な要素と情報処理とを連動させることで、より効率的な行動を実現することが非常に重要であると考えられる。しかし、人間は常に移動体に搭乗しているわけではなく、行動の目的・状況などによって、移動体から降りた状態で行動することも考えられる。
ここでは、搭乗時におけるインタラクションとして個人適応を、非搭乗時におけるインタラクションとして遠隔地からの操作とユーザの自動追尾を例にして述べる。
3.3.1 個人への適応
人間にとって快適な移動体を実現するためには、移動体が、ユーザの特性を把握し、自分自身でユーザに適応していく仕組みを有する必要がある。具体的には、移動中におけるペダルの角度や時間などユーザの操作履歴を記録し、その情報に基づいて、ユーザごとに異なる操作のパラメータを柔軟に変化させることで、快適な操作性を実現することができる。
3.3.2 遠隔地からの操作
人間は目的や状況に応じて移動体を降りて行動することが考えられる。複数のATが存在することを想定すると、様々な場所に搭乗者不在のATが存在することになる。このようなATを有効に利用するための手段として遠隔操作が挙げられる。車体の操作だけでなく、遠隔地に関する、映像や音声を含む様々な情報を収録・配信したり、アドホックネットワークを介して遠隔地におけるコミュニティ活動への参加などを実現することができる。遠隔操作に関しては、次章でより詳細に述べる。
3.3.3 ユーザの自動追尾
情報技術によって強化された移動体であるATが、人間の活動を阻害することなく、人間と物理的・情報的環境を密接に結び付ける媒介として機能するための一つの手段として、人間の後方を自動的に追尾し、必要に応じて音声等で情報を提示するというやり方が考えられる。このようなインタラクションの応用としては、ユーザの行動履歴の自動生成や道案内などの誘導システム、周辺の危険場所を検知して警告するといった精神的補助や、無人のATに荷物を搭載するなどの物理的補助などが考えられる。自動追尾に関しても、次章で詳しく述べる。
4 非搭乗時のユーザとATとのインタラクション
前章では、環境と移動体、移動体間、人間と移動体のインタラクションについて述べた。本章では、ユーザの移動は移動体に搭乗して行われるものだけではないという点に注目して、非搭乗時のATとユーザとのインタラクションについて述べる。
4.1 遠隔操作システム
本システムにおける遠隔操作の概要を以下に述べる。概要を図示したものが図である。コンソール用PCと通信用PCはソケット通信によってコマンドやカメラ画像の送受信を行っている。コンソール用PCから送信されたコマンドは通信用PCに送信され、コマンドの種類によって、接続されたカメラの制御を行ったり、モータ制御用PCに対してモータ制御メソッドを呼び出す。また、通信用PCはカメラの映像をHTTP (HyperText Transfer Protocol)でコンソール用PCに送信する。
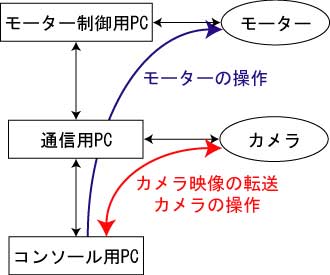
図4.1: 遠隔操作システムの概要
遠隔操作は図のようなコンソール画面を用いて行われる。画面左部の上下左右のボタンによって車体の操作に関するコマンドを、右部のボタンによってカメラの操作に関するコマンドを通信用PCに送信する。コマンドを受信した通信用PCは、受信したコマンドの種類によって異なった処理を行う。車体の操作は、モーター制御用PCで動作するモーター制御メソッドを遠隔実行することで行われる。これには、RMI (Remote Method Invocation)という仕組みを利用している。この仕組みを用いることによって、通信部分に関するコードを作成することなく、通信相手のオブジェクトの持つメソッドを実行することが可能になる。また、カメラの向きやズームイン/アウトなどの操作は、やはりカメラ制御メソッドを遠隔実行することで行われる。そしてカメラが取得した映像はコンソール用PCに転送され、コンソール画面の中央部に表示される。このカメラ制御と映像はセキュリティのためのモニタリングシステムなどに利用することが可能である。
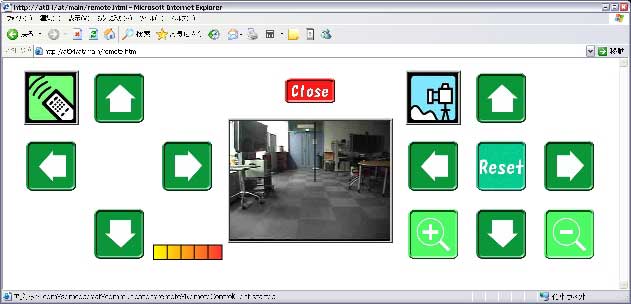
図4.2: 遠隔操作を行うためのコンソール画面
4.1.1 車体の操作
前述したように、車体の操作はコンソール画面左部のボタンによって行われる。ボタンの種類は前進後退・左右の旋回の4種類が用意されている。以下に車体の操作の手順を示す。
-
操作用のボタンが押されたと同時に通信用PCにボタンと対応したコマンドを送信する。
-
コマンドを受信した通信用PCは、コマンドに応じたメソッドをモーター制御用PCから呼び出し、移動を開始する。
-
操作用のボタンが離されると同時に通信用PCに停止コマンドを送信し、通信用PCは停止メソッドをモーター制御用PCから呼び出す。
以上のようにして車体の操作は実現される。また、荷物を運搬するときは全体の重量が大きくなるのでパラメータを大きめに変更する必要があるし、監視を行うときは注意深く画面を見るために、ゆっくり移動させるよう小さめにパラメータを調節するといったように、使用目的や状況に応じて移動速度のパラメータを動的に調整できる仕組みが必要であると考えられる。このようなときは車体の操作インタフェースの右下にあるバーをクリックすることによって、速度パラメータ変更のコマンドが通信用PCを経由してモーター制御用PCにおいて反映される。
4.1.2 遠隔地の映像の取得
カメラの操作はコンソール画面右部のボタンで行う。車体の操作と同様に上下左右のボタンを押している間はカメラのパン・チルトのコマンドが通信用PCに送信され、そのコマンドに応じたカメラの操作を行い、ボタンを離したときに停止コマンドが送信され停止する。また、左右の下段にあるボタンによってズームイン・ズームアウトを行うことができる。中央のボタンはカメラを初期状態(操作前の状態)に戻す。このカメラの映像は映像配信サーバを用いることによってコンソール用PCへと送信される。その映像をコンソール画面中央部に表示することによって、遠隔地の映像を閲覧することが可能となる。このようにして取得されたカメラ映像は、遠隔操作をしやすくするためだけではなく、記録データとして保存しておくことで、警備システムにおける防犯カメラのように用いることも可能になる。
現在ATでは、遠隔操作を行うためのコンソール用PCと通信用PCが無線アドホック通信によって接続を行っている。したがって無線の有効範囲外で使用することができない問題点がある。解決方法としては、コンソール用PCを所持するユーザが無線の有効範囲外に移動し、コンソール用PCとの接続が切断されたことを検出した時点でグローバルネットワークに接続し直すという方法が考えられる。このような仕組みを実現することによって、無線の届かない範囲における遠隔操作の利用が可能となる。
4.2 ヒューマントレーサ
これまでにも、ユーザを追尾するシステムの研究・開発は多数行われている。カメラから得られた映像から、追尾するユーザの特徴領域を画像処理によって抽出する手法や、全方位カメラとレーザー照準器を組み合わせた手法、ユーザが装着した装置から発信される電波の指向性と強度を用いる手法などその方法は様々である。しかし、これらの手法は、パターンマッチングを用いてユーザの識別を行っているため、事前に膨大なデータを登録しておかなければならない。また、必要な装置のコストが高い、複数のユーザがいる状況で任意の時点における追尾対象のユーザの変更に未対応である、などの問題点があった。
このような問題点を改善するために、本研究では、赤外線IDを発信する赤外線タグをユーザに装着して、比較的容易にユーザの追尾を実現するシステムを提案する。このシステムでは、ユーザの認識を行うための装置はAT自身に搭載されているので、特別な設備を屋内もしくは屋外に設置する必要はない。また、ユーザが装着する赤外線タグは衣服に埋め込まれており、ユーザの行動を阻害するようなこともない。
本システムの概要を以下に述べる。このシステムは図のような構成となっている。ユーザは、赤外線信号としてエンコードされた固有のIDを送信する赤外線タグを装着している。その赤外線タグから発信される赤外線信号をATに搭載された、後述するPSD-IRアレイと呼ばれるセンサー・デバイスの赤外線受信器で受信し、IDとしてデコードする。このとき、どの受信器で受信したかによってユーザのいる位置を推定する。その方向に関するPSD測距センサーを用いてユーザとの距離を測定して、ユーザのATに対する相対位置を推定する。これによってユーザの追尾を可能にしている。
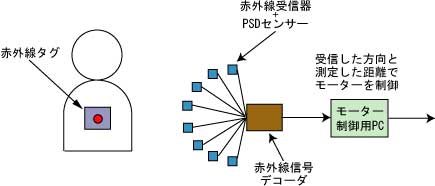
図4.3: システム構成図
4.2.1 赤外線タグ
赤外線タグは、ユーザを特定することのできる8ビットのIDを、赤外線信号にデコードしてタグ上の赤外線LEDから送信する装置である。IDは、1秒間に数十回程度の頻度で送信される。ユーザは、この赤外線タグを身に着けることによって、ATに自分のいる位置を知らせることができる。この赤外線タグにはID送信用のスイッチの他に、追尾の開始・終了を送信するボタンや、「時刻を知らせる」「その場に待機させる」などのように、ユーザが自由にカスタマイズした動作を行うためのボタンが取り付けられている。また、IDを8ビットとしているが、IDのビット数を大きくすることで利用できるユーザの数を増やすことも可能である。
4.2.2 PSD-IRアレイ
ATには赤外線タグから発信された赤外線を受信する受信器と、前にある物体との距離を測定するPSD測距センサーから構成される、図に示すような受信デバイスが搭載されている。これをPSD-IRアレイと呼ぶ。このデバイスには、赤外線受信器とPSD測距センサーが1つの組として、ATの前方の8方向に取り付けられている。モーター制御用PCと接続を行うためのインタフェースはシリアルインタフェースを採用している。このデバイスは、赤外線受信器で受信した赤外線信号をデコードして得られた赤外線タグのIDと、受信した赤外線受信器に対応したPSD測距センサーの測定値をモーター制御用PCに送信する役割を持つ。

図4.4: PSD-IRアレイ
4.2.3 ユーザの位置の推定
ユーザの位置の推定の手順を以下に示す。この手順を図示したものが図である。
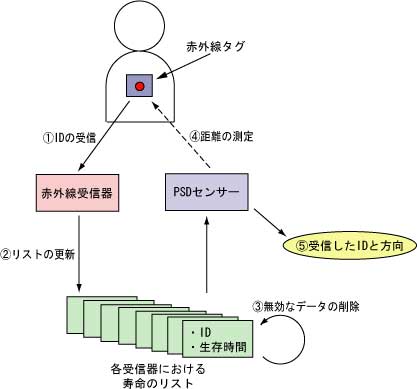
図4.5: ユーザの位置の推定
まず、受信した赤外線タグのIDと、どの受信器で受信したのかを示すインデックスが1つの組としてモーター制御用PCに渡される。このときの問題点として、赤外線タグは1秒間に数十回ほどの割合でしかIDを送信することができず、IDの受信されない空白の時間が生じてしまい、タグを見失ったとみなしてしまう場合がある。このような問題点を解決するために、8つの赤外線受信器すべてに対してデータの寿命を与え、寿命が残っていればその受信器で受信したIDは有効だとみなすという手法を用いた。具体的な手順を以下に示す。
-
受信したIDとその寿命を8つの受信器ごとに管理するリストを用意する。
-
IDを受信するごとに、受信した赤外線受信器におけるIDの寿命をのばす。
-
ある一定時間の間隔でリストを調べ、寿命の残っているIDはそのまま保持し、寿命の切れたIDは無効にする。
このリストを用いて、追尾するべきユーザのIDと受信した方向を推定することが可能となる。また、PSD測距センサーによってその方向にある対象との距離を測定することでユーザとの距離とする。そのとき、図の点線部分のように、反射などの物理現象によって同一のIDを複数の赤外線受信器が同時に受信してしまう可能性がある。その場合は有効な方向すべてに対して対象との距離を測定し、その距離がもっとも近い方向をユーザのいる方向としている。
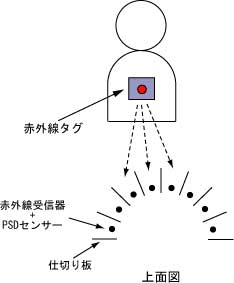
図4.6: IDの受信方向の推定
4.2.4 ユーザの追尾
ATの移動は、左右の旋回速度、前進・後退の速度の2つのパラメータを指定することによって行われる。したがって、赤外線タグから発信されたIDをどの方向の赤外線受信器が受信したかによって前者のパラメータを決定し、その方向に対応したPSD測距センサーの測定値によって後者のパラメータを決定する。この手順を一定時間間隔で繰り返すことによってユーザの追尾を可能にしている。このとき、旋回のパラメータの決定手法として、車体に搭載された3軸センサーによって取得されるyawを用いて補正を行う方法が考えられる。しかし、この手法は1つの赤外線受信器における受信可能な角度が大きいため、旋回中であっても同じ方向で受信したとみなしてしまう。そうすると、補正するための角度が正確に取得できないので、ここでは角度による補正は行わず、受信した方向に応じた大きさのパラメータを与えるという手法を用いた。また、何らかの原因によって追尾中にIDが取得できなくなった場合には、その場に停止し目標のIDを再び受信するまで待機する。具体的にはユーザが赤外線を受信できない範囲にいる場合や、ユーザとの間に障害物が出現する場合などが想定される。
4.2.5 複数のユーザによる利用
複数のユーザが1台のATを使用するとき、荷物の運搬における引継ぎのように、追尾するべきユーザが動的に変更される場合が考えられる。ATは内部的に、追尾するべきユーザ(マスタ)を管理するキューを持っており、ユーザから追尾開始の要求が送信されると、そのユーザのIDをキューにプッシュする。このとき、そのIDが最初のIDならばマスタとして追尾を開始し、すでに他のIDがプッシュされているときは、そのユーザの追尾が終了するまで待機することになる。そして、マスタから追尾終了の要求が送信されると、そのIDをポップし、先頭のIDを持つユーザをマスタとして追尾を再開する。キューが空のときは次の追尾開始の要求が送信されるまで停止する。また、コンソール用PCにはキューのデータが提示されており、次のマスタを任意に指定することも可能である。
5 非搭乗時におけるインタラクションの応用
前章では、非搭乗時における人間とのインタラクションを実現するための基盤技術に関して述べた。本章ではこれらの技術を用いることによって可能になる応用例について述べる。
5.1 遠隔地におけるインタラクション
旅行や遊びの目的地を決定する際に、その場所に関する情報を知ることができれば、より効率的に有意義な選択をすることができる。有用な情報としては、周辺の映像やその場所にいる人間の評価などが挙げられる。また、これらの情報はリアルタイムなものであるほどその価値は高いと言える。今回提案した遠隔操作システムを応用することによって、これらの情報をリアルタイムで取得することが容易になる。たとえば、周辺の映像はカメラを用いることによって参照することができる。また、その場所にいる人間の評価は、アドホックネットワーク上に存在するATを利用している人間とコミュニケーションをとることによって取得することが可能となる。また、これらのインタラクションを保存しておくことによって、実際にその場所に来た時の行動をより有意義にできるのではないだろうか。たとえば、カメラ映像にメタ情報をインデックスとして付与しておき、あとでそのインデックスを参照することで自分の行きたい場所を確認することができる。
5.2 施設のガイドシステム
旅行における観光スポットや、美術館や記念館での展示物のような鑑賞対象に付随する、歴史や作者、制作年といった情報は、その鑑賞対象に対する理解を深める上で非常に有用である。しかし、このような情報を提供する役割を持つガイドは、団体行動を行うために決められた順路を決められた時間内に進むだけのものであり、ユーザは自分の好きな順路で鑑賞することができなかったりとその自由度は低いという問題点が挙げられる。
本論文で提案したヒューマントレーサと音声などによる情報の提示を組み合わせることによって、ユーザの自由度の高いガイドシステムを構築することができる。ガイドを行う手順を以下に示す(図)。
-
鑑賞対象に対応したIDが書き込まれたRFIDタグを、ATに搭載されたRFIDタグリーダーが認識する。
-
近くに設置された情報サーバに、取得したIDをキーとして情報を要求する。
-
サーバはIDに対応した情報をATに送信する。
-
ATは受信した情報を音声で読み上げる。
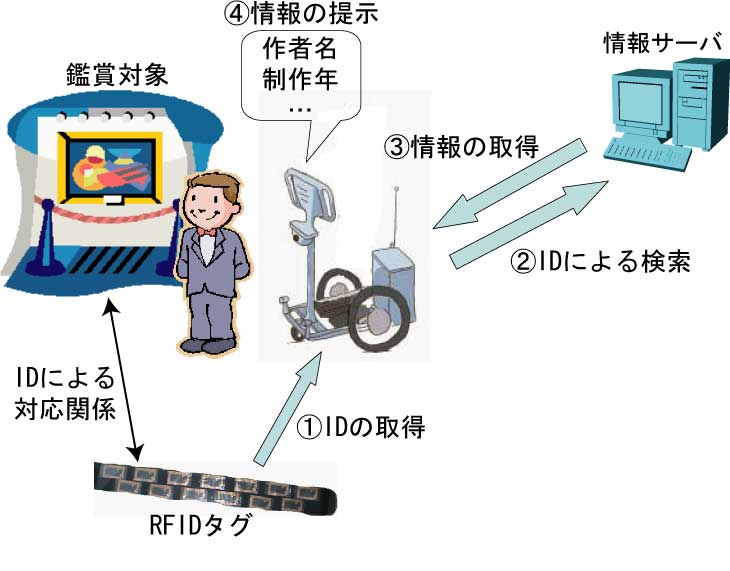
図5.1: ヒューマントレーサによるガイドシステム
ヒューマントレーサを用いることによって、ユーザは好きな順路で、自由なスピードで満足のいくまで鑑賞を行うことができる。このようなシステムを構築することの利点としては以下のような点が挙げられる。
-
サーバに情報を登録する形式をとっているのでATは事前知識を必要としない。
-
インフラとして必要となるのは、RFIDタグとアドホック通信が可能な情報サーバのみなのでコストが小さい。
-
情報サーバ上の情報を自由に更新することができる。
-
個人に適応したガイドを行うことができる。
サーバから情報を取得するだけではなく、掲示板のようにユーザがコメントを付与できるような仕組みを用いることで鑑賞対象に関する情報をよりリッチすることができる。たとえば、鑑賞対象に関するエピソードや解釈などの情報を対象物に関連付けることによって、他のユーザがその情報を見たときに新たな観点からの知識を発見することができるはずである。ただし、ATはユーザの後方にいるので、入力のインタフェースに関する考察が必要である。具体的な例としては、音声認識による入力や、コンソール用PCを用いた入力が考えられる。
5.3 アシスタントエージェント
現在産業の分野において、生産性を高めるためにSCM (Supply Chain Management)やERP (Enterprise Resource Planning)といったような手法が導入されている。これは取引先との間の受発注、資材の調達から在庫管理、製品の発送といった事業活動のすべてをコンピュータによって総合的に管理するという手法である。しかし、このような手法も現場における作業が効率的に実行できなければうまく機能しない。そこで、ヒューマントレーサを用いた、現場における人間の作業をより効率的に行うためのアシスタントエージェントを提案する。このシステムでは、現場における作業を効率的に行うために必要な情報管理を行うことのできる情報端末としてのATが、作業者の後方を自動的についてくるので、作業者は身軽に作業を行うことができる。さらに環境との接続も容易に行うことができるので、装置の稼動状況や生産量などを容易に取得することが可能となる。またこの他にも、作業場所に依存したオペレーションの適切な支援や、他のATと移動体通信を行うことによる協調的なスケジュールの決定、カメラを用いることによる作業者の管理・監視など様々な用途が考えられる。
6 関連研究
ここでは、個人用知的移動体に関連する、移動を中心とする人間の行動と情報とを結びつける研究と、本研究で提案したヒューマントレーサに関連する、人間を自動的に追尾する仕組みに関する研究について述べる。
6.1 知的な移動支援に関する研究
6.1.1 知的車椅子
車椅子は、高齢者や足腰に障害を持つ人間にとって、必要不可欠な移動手段である。しかし、従来の電動車椅子は、自分の意図どおりに操作できるまでに、多くの時間を要する。たとえば、ジョイスティックを用いたインタフェースは、搭乗者の姿勢や車椅子自体の特性などの要因から、搭乗者の意図との間にずれが生じ、危険を伴う可能性がある。現に、電動車椅子利用者の交通事故は年々増加している。高齢化社会の到来による、身体的に障害を持つ高齢者の増大に伴い、より安全で機能性の高い電動車椅子の開発が望まれている。このような背景のもと、様々な知的車椅子に関する研究が行われている。
知的車椅子では、事前に学習した障害物回避や壁沿い行動による移動時の搭乗者の操作負担の軽減や、他の知的車椅子と協調することによる道路の譲り合いや隊列成型といった協調行動の実現などを目指している。
この研究プロジェクトでは、車椅子を日常的に必要としている人を対象にしており、限られたユーザに対しての操作性の向上を目指しており、操作を手助けする技術に関しては本研究より優れた成果を上げている。しかし、本研究では対象となるユーザは限定されておらず、むしろ健常者や障害者という枠を超えて誰もが利用できる新しいツールを目指している。また、この研究プロジェクトで扱う情報は、ユーザの操作性を向上させるためのものであったり、協調走行を行うためのものであったりとその適用範囲は狭い。本研究におけるATは、そのような情報だけではなく、一般的な情報サービスなどとの連携も想定している。
6.1.2 RCT (Robotic Communication Terminals)
「移動すること」は、人間にとって最も基本的で意味ある要素の一つであり、よりよい生活を考える上でのキーワードであると考えられる。 ところが、多くの人々が「便利な移動」を楽しむ一方で、障害者や高齢者は、移動に必要な状況把握や情報へのアクセス、身体機能が十分でないために、大きな不安をもって生活し、自由な外出を阻まれてしまっている。このような中で、「人にやさしい情報通信移動システム」をテーマに立ち上げられた研究プロジェクトがRCTである。
RCTは、設置場所周辺をモニターし、障害物や動物体など環境についての状態を検出する環境端末、インターネットや環境端末から目的地への経路情報や障害物に関する情報などを取得するためのユーザ携帯型移動端末、搭載されたセンサーを用いた危険回避や走行支援を行うユーザ搭乗型移動端末の3種類の情報端末から構成される。これらの情報端末がネットワークを通じて協調動作を行うことで、ユーザの移動を支援することを目指している。
このプロジェクトは、人間の行動を構成する移動に着目し、特に障害者や高齢者の移動を情報通信技術によって支援することを目指している。本研究は、情報通信技術を用いて人間の活動を効率的に有意義なものにするという点でこのプロジェクトと類似する点は多い。しかし、ATは人間の行動と情報を密接に結びつけるための手段として移動に着目しているのであり、移動の支援のみを目指しているわけではなく、人間の活動全般の支援を目指している。
6.2 自動追尾に関する研究
6.2.1 全方位カメラとレーザーを用いた手法
人間の後方を追尾する移動体に関する研究として、法政大学の伊東らの提案する全方位カメラとレーザーを用いた手法が挙げられる。この手法では全方位カメラによって取得した映像を画像処理することで検出された人間の位置と、レーザー距離センサーによって検出された人間の位置の2つの情報を統合することで追尾を可能にしている。精度の異なる情報を統合し、より精度の高い情報を抽出するためのアルゴリズムとしてカルマンフィルタを採用している。
この研究では、2つの情報を統合することによって、人間の追尾を可能にしている。しかし、この手法に用いている全方位カメラやレーザー距離センサーは非常にコストが高いという問題点がある。しかも、追尾する人間を特定するために、初期状態として追尾するべき人間の位置を入力しなければならず、追尾する人間の動的な変化に柔軟に対応できないという問題がある。
6.2.2 超音波を用いた手法
人間と共に移動するロボットの実現を目指して、筑波大学の大矢らは超音波を用いた人間の追尾手法を提案している。人間との距離を測定するために、発信した超音波の反射時間によって推定し、複数の超音波受信器を使用することで人間の存在する角度を推定する。しかし、人間が複数存在するときに、追尾するべき対象を認識することができないという問題点が挙げられる。これを解決するために特定の超音波を受信すると超音波を送信する超音波トランスポンダと呼ばれるセンサーを人間に持たせるという方法を用いている。つまり、特定のロボットから送信された超音波を人間が携帯している超音波トランスポンダが受信し、人間を特定できる超音波をロボットに対して発信することで、追尾するべき人間を認識することが可能となる。
この手法では、追尾するべき人間の認識を行うことができる。しかし、これは追尾される人間と追尾を行うロボットが1対1に対応していることが前提である。つまり、追尾される人間はあらかじめどのロボットが追尾を行うのか事前に知らなければならない。これに対して本研究のヒューマントレーサでは、人間が追尾を行うATを事前に知っている必要はなく、任意のATを指定して追尾を行わせることが可能である。
6.2.3 発光器を用いた手法
人間に持たせた発光器から発せられる発光標識を画像処理で認識させることによって、人間の位置を検出する手法を筑波大学の南雲らが実現している。この手法では、ユーザは2つの離れたLEDからなる発光標識を携帯し、画像処理によってこの標識を検出する。そして検出された発光標識の位置から人間のいる方向を、2つのLED間の画素数から人間との距離を推定する。また、LEDを点滅させ、点灯しているときと点灯していないときの画像の差分をとることで、ロバストな発光標識の検出を可能としている。
追尾する人間を検出するために発光器を用いる点でヒューマントレーサに近い手法であるといえるが、人間との距離の推定方法が異なる。この手法では2つのLED間の画素数を用いているため、人間が振り向いたりして体の向きが変わってしまうと、2つのLED間の画素数と実際の距離に誤差が発生してしまう可能性がある。これに対してヒューマントレーサでは、PSD測距センサーを用いて実際に距離の測定を行っているので体の向きの変化による推定の誤差は少ない。
7 おわりに
7.1 まとめ
筆者の所属する研究室では、人間を中心とした物理環境・情報環境の融合を目指し、個人用知的移動体ATを開発している。本研究では、ATを介した情報世界と人間をより密接に結びつけるために、非搭乗時における人間-移動体間インタラクションを実現するための技術を提案した。また、それに基づいてATの遠隔操作システムとユーザを追尾するヒューマントレーサを実装した。
遠隔操作システムでは、ボタンによって前進後退・左右の旋回を行うことができ、ATに搭載されたカメラの操作と同時に映像を参照することもできる。操作性に関しては、移動できる方向が4種類しかないので、ゆるやかなカーブを描くように動かすといった滑らかな操作をすることができなかった。また、カメラの操作に対する映像の遅延は最大1秒ほどあり、若干違和感が残った。原因としては、カメラに接続された通信用PCからコンソール用PCへ送信する際におけるデータ容量と送信速度のバランスの悪さが考えられる。
ヒューマントレーサでは、ユーザが装着した赤外線タグから発信されるIDを、ATに搭載されたPSD-IRアレイで受信することによって、ゆっくり歩く程度の速度での追尾が可能となった。しかし、早く歩く程度の速度で急に方向を転換すると、IDを受信できず、追尾が不可能になるということが分かった。原因としては、赤外線信号を受信できる範囲が前方だけと狭いものであること、PSD測距センサーの測定可能距離が80cm以内と狭いものであることなどが挙げられる。改善策としては、センサーの数を増やすことによって、PSD-IRアレイの受信可能な角度を拡張すること、より広範囲を測定できるPSD測距センサーを用いるなどが考えられる。
また、これらの技術を用いた応用例としていくつかのアプリケーションについて考察を行った。
7.2 今後の課題
7.2.1 遠隔操作のしやすさの改善
現段階における遠隔操作では前進後退・左右の旋回の4通りの移動手段しかなく、ゆるいカーブを描くように操作したくても、思い通りに操作することが困難である。また、その速度も5段階で調整することができるが、わざわざ調整を行ってから操作を行うのは非効率である。このようにユーザの意図をより忠実に反映した操作を実現するためのインタフェースが必要である。たとえば、移動に関するインタフェースとして、直進方向と旋回方向を座標軸としたインタフェースを用いることによって、細かな操作が可能になる。しかし、操作の自由度があがるにつれて複雑度が増す傾向があるので、ユーザが使いやすく、かつ直感にあったインタフェースに関して考察をするべきである。速度の調整も一定時間同じ方向に進んでいるときは、速度を自動的に速くしたり、細かい操作が行われているときは速度を落としたりとユーザの操作に応じて、AT自身が判断して速度を調整することによって操作性が向上すると考えられる。
7.2.2 遠隔地の詳細な情報の提示
第5章で述べたようにATに搭載された様々なセンサーを用いることによって遠隔地におけるインタラクションを実現することができる。しかし、今回実装システムでは、遠隔地に関する情報はカメラからの映像のみである。ATに搭載されたRFIDタグリーダーを用いて環境に設置されたRFIDタグ内のIDを取得する機能や、アドホックネットワーク上の他のATを識別する機能は実現されているので、これらの機能と遠隔操作の機能を連携させる必要がある。ここで、問題となるのはセンサーやネットワークを通して様々な情報を取得することが可能となったとき、情報量が多くなってしまうという点である。ユーザにとって有益な情報であったとしても一度に提示される量が多ければ、その情報の価値は相対的に下がってしまう。具体的な解決方法としては、以下のような手順が考えられる。
-
情報をカテゴリーごとに分け、各カテゴリーごとにパネルを作成する。
-
これらのパネルはタブによって切り替えられるようにしておく。
-
新たに情報を取得したときは、そのタブを強調することでユーザの注意を促す。
7.2.3 追尾精度の向上
今回実装したヒューマントレーサでは、決められた速度での追尾しかできない。しかし、人間の歩行の速度やリズムなど歩行に関するパラメータは個人によって異なるので、ユーザにとって自然な追尾を行うためには、ユーザに合わせた速度を与える必要がある。そのためには、追尾を行っているときに、ユーザとの距離を調べることで速度を調節していく必要がある。たとえば、ユーザとの距離が遠い時間が長ければ速度を上げ、逆に近い時間が長いときは速度を下げるなどの方法が考えられる。また現段階では、閾値を用いたパラメータの決定を行っているが、距離を引数とする連続関数を用いて決定することによって、より滑らかな追尾を行うことができる。
7.2.4 インタラクションを行うためのインタフェース
現段階では、追尾中におけるユーザとのインタラクションは、近さを知らせるためのアラームしか用意されていない。しかし、センサーなどによって取得したユーザが気づかなかった情報や、近くに知り合いがいるといった情報を、環境やネットワークを介して取得したときに、ユーザに情報を提示するインタフェースが必要となる。合成音声による読み上げや、アラームによってユーザの注意を促すなどの方法が考えられる。また、ATからユーザに対するインタラクションだけでなく、ユーザの興味を持った対象に関する情報を要求するなどのように、ユーザからATに対して能動的にインタラクションを行うときのインタフェースについても考察を行う必要がある。音声認識やコンソールのタッチパネルを用いる手法の他には、特定のボディジェスチャを画像処理によって認識する手法などが考えられる。
謝辞
本研究を進めるにあたり、指導教官である長尾確教授、大平茂輝助手には、研究に対する姿勢や心構えといった基礎的なことから、ゼミでの貴重な御意見、論文執筆指導等を賜り大変お世話になりました。心より御礼申し上げます。
また、友部博教さんには、研究室の楽しい雰囲気に努めていただいたり、研究に関する多くの有用なアドバイスを頂きました。梶克彦さんには、プログラミングに関するアドバイスなどを頂きました。山本大介さんには、本研究で使用したカメラに関するお手伝いをしていただきました。松本和之さんには、様々な話題を提供していただきました。小酒井一稔さんには、生活面などで相談にのっていただきました。本当に感謝しております。
また、鬼頭信貴さんには本研究に用いたハードウェアの設計や実装に関して様々な御助力を頂きました。心より御礼申し上げます。
佐橋典幸君、本村可奈子さんは、研究室生活等様々な場面において協力していただきました。ありがとうございます。
長尾研究室秘書の金子幸子さんには、研究活動や学生生活の面で様々なサポートをしていただきました。この場を借りて御礼申し上げます。