
全方位に移動可能な個人用知的移動体とその応用
1 はじめに
近年、自動車同士の衝突事故を回避するための仕組みが開発・実用化されているが、歩行者や個人用の低速移動体の事故防止のための仕組みは十分に研究が行われていない。本研究では、自動車などの高速移動体と協調して個人を事故から守るために、柔軟な回避運動を考慮し全方位に移動可能な個人用知的移動体を開発した。いわゆるモバイル/ユビキタス・コンピューティングが、情報機器を携帯したり、周囲の物理的環境に埋め込むことによって情報環境を遍在化し、人間活動を支援することを目指しているのに対し、われわれの手法は個人に適応した情報環境を人間と一体化させ、個人の情報処理機能だけでなく身体機能をも強化して人間活動をより安全で快適なものにすることを目指している。
たとえば、複数の移動体が暗黙的に位置や速度や方向を伝達し合うことによって事故を未然に防ぐことができ、移動体そのもののセンサーは周囲の状況を認識して安全かどうかを確認しながら移動することができる。さらに、移動体の搭乗者が降車して歩行者になった場合は、移動体がその人間を自動的に追尾し、センサーと通信機能を利用して危険性を認識し、人間に警告を与えることができる。
2 オムニムーバー
個人用知的移動体AT (Attentive Townvehicle)は、搭乗者である人間や、移動体自身を取り巻く環境に適応し、周囲の環境や他の移動体との通信によって協調的に動作可能な個人用の乗り物である。ATの最大の特徴の一つは、全方位に移動できることである(図を参照)。われわれはそのような移動体を「オムニムーバー(OmniMover)」と呼んでいる。オムニムーバーは、アメリカ製の個人用移動体セグウェイのようにその場回転をして任意の方位を向いてから走行するようなものではない。静止状態からならばどの方位にもすぐに動けるものである。

図1: 全方位移動が可能な個人用知的移動体AT
ただし、すでに動いている状態で任意の方位に動くためには慣性を考慮する必要がある。また、乗っている人間への加速度の影響を考慮しなければならないため、動きたいと思う向きに即座に動けるわけではない。
ところで、任意の方位に動けるということは、これまでの乗り物の動き方とは異なる動き方ができるということである。それは、たとえば障害物などのよけ方に現われてくる。これまでの乗り物は、止まっている状態から真横に動くことができなかった。
そこで、本研究では、ロボットコンテストなどの競技用ロボットで以前から導入されている技術である、オムニホイールを採用した。これは、車輪の回転方向と垂直の方向に回転する複数の小型の車輪を合成した複合車輪である。この車輪を付けた物体は横滑りによって横方向に移動することができる。
ただし、4個のモーター付きオムニホイールを使って全方位に動かせるようにするため、モーターのパワーを結構無駄に使わなければならない。そのためバッテリーの消費を考えるとあまり速いスピードを出すことができない。また、オムニホイールは弾力性に乏しいので、振動や衝撃の吸収力が弱い。つまり、この構成が乗り物として妥当かどうかは、さらなる工夫次第なのである。
2.1 全方位移動のメカニズム
全方位移動(および、その場回転)は、図のように非平行に配置された4個のオムニホイールを個別に制御することによって実現している。オムニホイールとベルトでつながれた高トルク(750W)のサーボモーターは任意の速度制御が可能であり、またトルクを0にすることで空転するようにもできる。前後左右に動かすときは、4輪の回転速度を等速にして、それぞれの回転方向(正転か反転)を動く方向に合わせて調節する。車体から45度角の方向へは、その方向を向いている2個の車輪の同じ方向に同じ速度で回転させ、それ以外の車輪は空転するようにする。それ以外の任意の方位へ移動するときは、4輪の回転速度と回転方向を細かく調整する。これによって、図のような柔軟な障害物回避移動が可能になる。
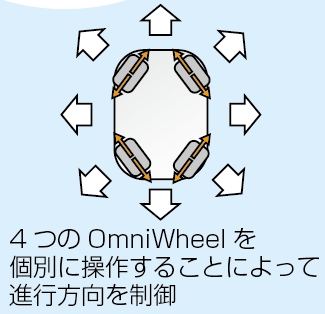
図2: 全方位移動のメカニズム
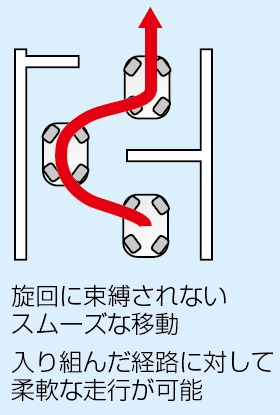
図3: 全方位移動による障害物回避
2.2 衝突回避と自律走行
ATには、全方位の障害物までの距離を測定するセンサーが装備されている。そのため、障害物を検知すると回避するように動くことができる。また、無線LANと赤外線通信を用いた移動体間通信によって複数の移動体が衝突しないように協調的に動かすこともできる。これらの仕組みによって、搭乗者の安全性を十分に考慮した走行が可能である(図を参照)。
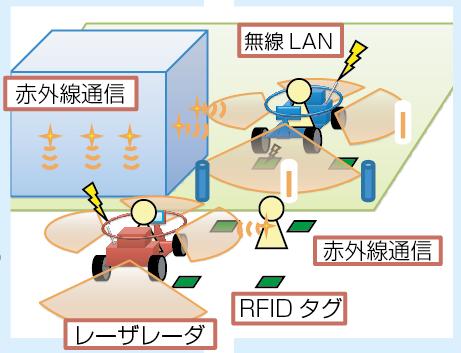
図4: ATと環境とのインタラクション
また、たとえば、屋内では壁沿いを走行することによって、目的地まで自律的に走行することができる。この場合、位置認識が必要になるが、位置情報を記録したRFIDタグと、モーターの回転数から計算した移動距離を考慮することで誤差2m以内の位置を知ることができる。さらに、地図情報と目的地の検索および位置に連動した情報案内の機能を追加したのが、次に述べる自動トランスポーテーションシステムである。
3 個人用知的移動体の応用
3.1 自動トランスポーテーションシステム
たとえばショッピングモールや総合病院などの、内部が込み入ったエリア内を目的地まで移動する場合に、搭乗者の状況と意図を認識して、目的地まで移動させるシステムである。携帯型のナビゲーションシステムと異なり、搭乗者を物理的に運びながら、目的地やその経路において、搭乗者の関心が高いと思われる情報を提供する。
現在のところ、自動トランスポーテーションは屋内に限定されている。そのため、常に壁を検出して壁から一定の距離を維持しながら走行するようになっている。これは、屋内に限らず一般に位置測位の精度が高くないために、位置情報を補足する手段として、壁に沿って進むことで地図との対応を取りやすくし、さらに、壁に設置したランドマークとしてのRFIDタグを利用してだいたいの位置を知ることができるようにするためである。
壁に沿った自動走行は車体の右側の壁沿い、左側の壁沿い、前方の壁沿いの3つのモードがあり、それぞれのモードで2方向の移動をする。これは、RFIDタグリーダーが車体の右側、左側、前方の3か所に装備されているからである。ここで、前方の壁沿いをするのは、左折や右折の際に直前に90度その場回転をして、壁の方向を向いて走行する場合があるからである。また、壁に接近しすぎたり離れすぎたりした場合、柔軟に間隔を微調整することができる。これらは、ATの全方位移動の機能を活かした走行システムである。
3.2 実世界体験共有システム
ATの搭乗者は、暗黙的にその体験を記録し、他者と共有することができる。ただし、体験を解釈して構造化したり、インデックス付けを行う必要がある。たとえば、物理的な状況と、その場で獲得した情報を結び付けるような作業を行う必要がある。
インデックスを付ける作業が日常のさりげない行為の中に埋め込まれている状態が理想であるが、それはなかなかむずかしいだろう。状況を解釈して意味(的な情報)を与えるということは、無意識的にはできないからである。
さらに、そのインデックスを共有して、関連するコンテンツ(たとえば、Webコンテンツ)と結び付けておくことができる。映像・音声はもちろんのこと、Webで調べた情報やその場で入力したタグやコメントも体験のインデックスに関連付けることができる。
このような活動がグローバルに展開されれば、たとえ初めて訪れた場所であっても、実世界に付けられたさまざまな目印を発見して誰かの体験(の一部)を共有できるだろう。未来の乗り物ATは、そのようなインデックスを実世界上で検索し、体験を再利用するためのマシンにもなるだろう。
4 おわりに
全方位移動および移動体間通信、状況認識などの機能を持った新しい個人用知的移動体とその応用について述べた。今後、交通システムは大きく進化し、すべての移動体がATと同様の機能を持つことが考えられる。本研究は、未来の交通システムのあり方を模索するという意味合いも含んでいる。今後は、より大規模な実験を行って、本手法の有効性を詳細に検証する予定である。