
個人用知的移動体による屋内自動トランスポーテーション
1 はじめに
今日、ユビキタスネットワーク社会の到来を迎えている我々にとって、いかに上手く「人間の生活する実世界」と「情報の世界」との関連付けを行うかということが、我々の生活をより安全で快適、そして有意義なものにするための鍵となっている。そこで我々は、人間の生活において最も基本的で重要な要素の一つである「移動」に着目し、乗り物を情報端末化して情報処理と人間の物理的な移動とを連動させるという考え方のもと、AT (Attentive Townvehicle)と呼ばれる個人用知的移動体を開発している。
本研究では、ATを用いて人間の移動と情報を密接に結び付けるという構想を実現する一つの手法として、建物内において、搭乗者である人間を目的の場所まで自動的に移動させるという、屋内自動トランスポーテーションを提案する。具体的には、環境に設置されたRFID (Radio Frequency Identification)タグと移動体自身の走行履歴を統合して屋内でのATの現在位置を測位し、PSD (Position Sensitive Detector)センサや3軸センサを用いて障害物との衝突を回避するという方法で目的地までの自動走行を実現した。
2 個人用知的移動体AT
ATは、搭乗者である人間や、AT自身を取り巻く環境に適応して移動する個人用の乗り物である。自身が情報端末であること、センサ類が装備されていることから、ATは自ら周囲の情報を取得・処理し、その結果を移動に反映することが可能である。
現在開発中のATは、駆動系にオムニホイールを用いて全方位移動とその場回転を実現し、人間の直感に合った移動を可能にしている。さらに、ユーザの直感に合った操作も目指しており、運転にはゲーム機のリモコンを、各種設定にはタッチパネルを用いるなど、ATのユーザインタフェースを可能な限り簡単なものにしている。
3 屋内自動トランスポーテーション
現在の大規模な屋内施設では、屋内ナビゲーションのために、建物内に様々な案内板やサインを設置している。しかしこの手法では、人間を目的地まで誘導することができても、人間を目的地まで物理的に移動させることはできない。この問題を解決するために、屋内自動トランスポーテーションシステムを提案する。
3.1 屋内自動トランスポーテーションとは
我々は目的地が不明な場合、まず地図情報を取得し、そこから目的地と現在位置、それらを結ぶ最短経路を把握する。次に、現在の自分の周りの空間と地図情報を照合し、進行方向を決定する。それから時々刻々と変化する周囲の状況において、迫る危険を回避しながら移動するといった、いくつかのプロセスを踏んで目的地に到達するのである。このプロセスを人間の代わりに、移動体が自動で行うというものが自動トランスポーテーションである。本システムは大規模屋内施設での利用を想定した、「情報提示による道案内」と「人間の物理的な移動支援」を同時に実現する。
3.2 屋内自動トランスポーテーションの必要性
屋内で目的地を目指して移動する人にとって本来の目的とは、目的とする場所で何かをすることであって、移動そのものではない。それゆえ、人々は移動する際のコストや危険性を可能な限り低くしたいと考える。
しかし、位置固定のフロアマップによる道案内では、まずそれらのマップを探し当て、さらにそこから空間把握能力を駆使して移動する必要がある。また、近年開発中の携帯情報端末を利用した屋内道案内も、機器ごとの複雑な操作を覚える必要がある。それ以外にも、携帯情報端末を操作して情報を取得しながら移動することは、情報端末に気を取られて身近に迫る危険や情報を見落とす可能性があるため、非常に危険であると考えられる。このような課題を解決するだけでなく、本システムは搭乗者が移動中に、移動とは直接関係のない作業をすることを可能にする。そのため、素早く、安全に、そして楽に目的地へ移動したい人々にとって、有効なシステムである。
3.3 屋内自動トランスポーテーションの実践例
本システムが有効に活躍する場所の一つの例として、総合病院が挙げられる。来院する患者が病気や怪我のため、自力で歩行することが困難な場合には、移動体の利用が望まれる。また、病状に応じた診療科や診察までの待ち時間など、診察に向かう患者にとって有用な情報を、患者が移動しながら取得できる。
4 屋内自動走行の実装
本システムの要となるのが、目的地までの安全な自動走行である。そこで、全方位移動が可能なATを用いて、床や天井に移動を補助するレールを設置することなく、環境側のコストを最小限にした屋内自動走行の実装を行った。
4.1 RFIDタグによる測位
屋内の測位手法として、無線LANを用いた方法があるが、屋内を飛び交う様々な電磁波と干渉し合って正確な測位が難しい。そこで本研究では、軽量で電源を必要としないRFIDタグを、各部屋の入口や階段・エレベータ等の付近の壁に設置し、タグを読み取ることで現在位置を取得するという手法を用いた。また、ATには前方と左右方向に1つずつ、合計3つのRFIDタグリーダを装備した。
4.2 PSDセンサによる壁沿い走行
1mの範囲で障害物までの距離を検出可能なPSDセンサ12個を、ATの前後左右に装備し、壁との距離を常に一定に保ちながら壁に沿って走行する。正確な測位が常時できない場合、壁に沿って走行することが安全であると考えられる。表に示すように壁沿い走行には、走行の手がかりとなる壁の、車体から見た方向と進行方向の違いによって6種類の走行モードがある。これらのモードは、RFIDタグリーダーが車体の前方と左右の3方向に装備されていることに基づいている。
4.3 走行モードの切り替え
表の6種類の走行モードを切り替え、組合せることで屋内自動走行を実現している。また走行モードは 「RFIDタグを読み取ったとき」 「進行方向に壁があるとき」 「交差点での右折・左折が完了したとき」に切り替わる。ただし、左右の壁沿い走行モードから前方の壁沿い走行モードに切り替わる場合(およびその逆)は90度その場回転を行う。
4.4 走行実験
実際に図の環境でATを自動走行させる実験を行った。図の矢印の番号は表の番号に対応しており、その経路を走行する際の走行モードを表す。
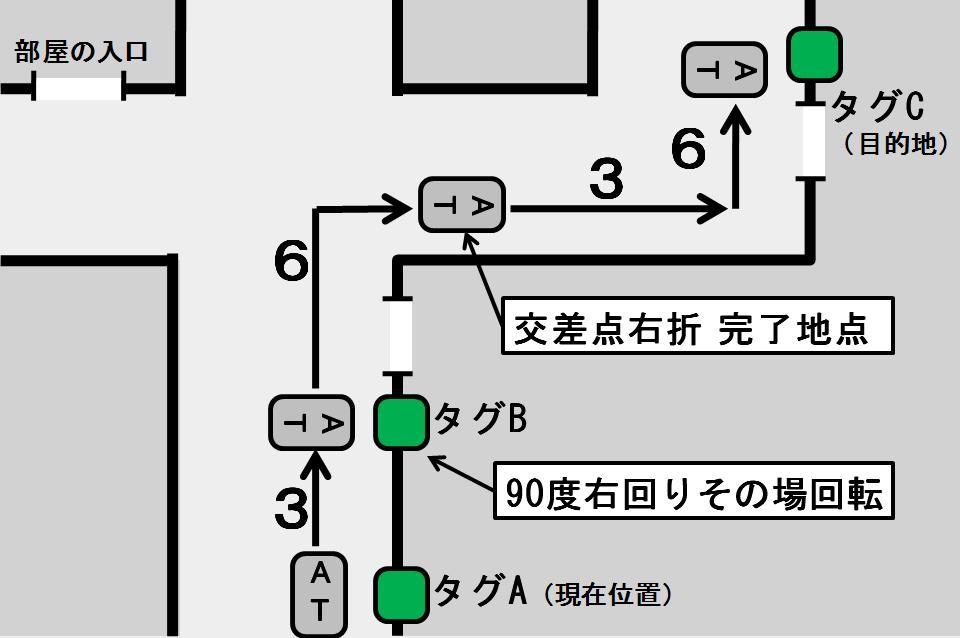
図1: 実験環境と走行軌跡
ATは現在位置と目的地が決定すると同時に、地図情報から「最短経路」・「読み取るタグの順番」・「走行モード切替のタイミング」を決定する。本実験ではATの現在位置をタグAの位置とし、目的地をタグCの位置と設定した。この場合、ATはタグBからタグCへの経路には交差点右折が含まれると判断し、タグB地点でその場回転により向きを変え、右壁沿い前進走行モードから前壁沿い左進走行モードに切り替える、という移動プランニングを行う。また、この移動プランに従って、壁に衝突することなく目的地のタグまで自動走行することを確認した。
5 今後の課題
本実験で用いたPSDセンサは、1m以内の近距離の障害物しか検出できない上に死角が多い。それゆえ、人間や、柱などの壁の凹凸を上手く回避できない。今後は、レーザーレンジセンサのような広範囲を検出可能なセンサを用いて障害物回避精度を高める予定である。また、人間を自動的に回避する方法や、自動走行中に間違ったタグを読んだり、タグを読み飛ばしたりした場合の再プランニング方法を検討し、安全・確実に目的地到達が可能なシステムにする必要がある。