
動的環境における個人用知的移動体の自動走行の効率化
1 はじめに
筆者が所属する研究室では,個人用知的移動体AT(Attentive Townvehicle)と呼ばれる自動走行可能な個人用の乗り物の研究・開発を行っている.
ATは自動走行中に障害物と遭遇した時にそれを回避する機能を持つ.しかし,障害物は必ずしも避けられるものとは限らない.小さな障害物が置いてあるだけの場合は,回避行動をとってその障害物を避けることができるが,移動体が通行できないほど通路を塞いでしまった場合は,ATは別の経路を使って目的地に向かわなければならない.
壁や階段など,あらかじめ通れないとわかっている場所は,経路設定に考慮されるが,経路設定時に環境中に存在せず走行中に一時的に現れるような障害物を考慮することはできない.このような障害物が現われた時に早めに経路を再設定するための情報をAT単体では取得することができない.そのため,ATの外部にそのような情報を取得する仕組みを用意しなければならない.
本研究では,障害物が一時的に現れるような動的環境においてプローブカー的な役割を果たす自律移動可能な無人移動体を導入することによって,ATの自動走行の効率化を実現する.
2 個人用知的移動体と自動トランスポーテーション
2.1 個人用知的移動体AT
われわれは,人間の生活において最も基本的で重要な要素の一つである「移動」に着目し,人間を物理的に移動させることが可能な移動体そのものを情報端末とするという発想で,人間の「移動」と情報処理との新たな関係を見出そうとしている.そのために,われわれはAT(Attentive Townvehicle)と呼ばれる情報端末化された個人用知的移動体を設計・開発している.
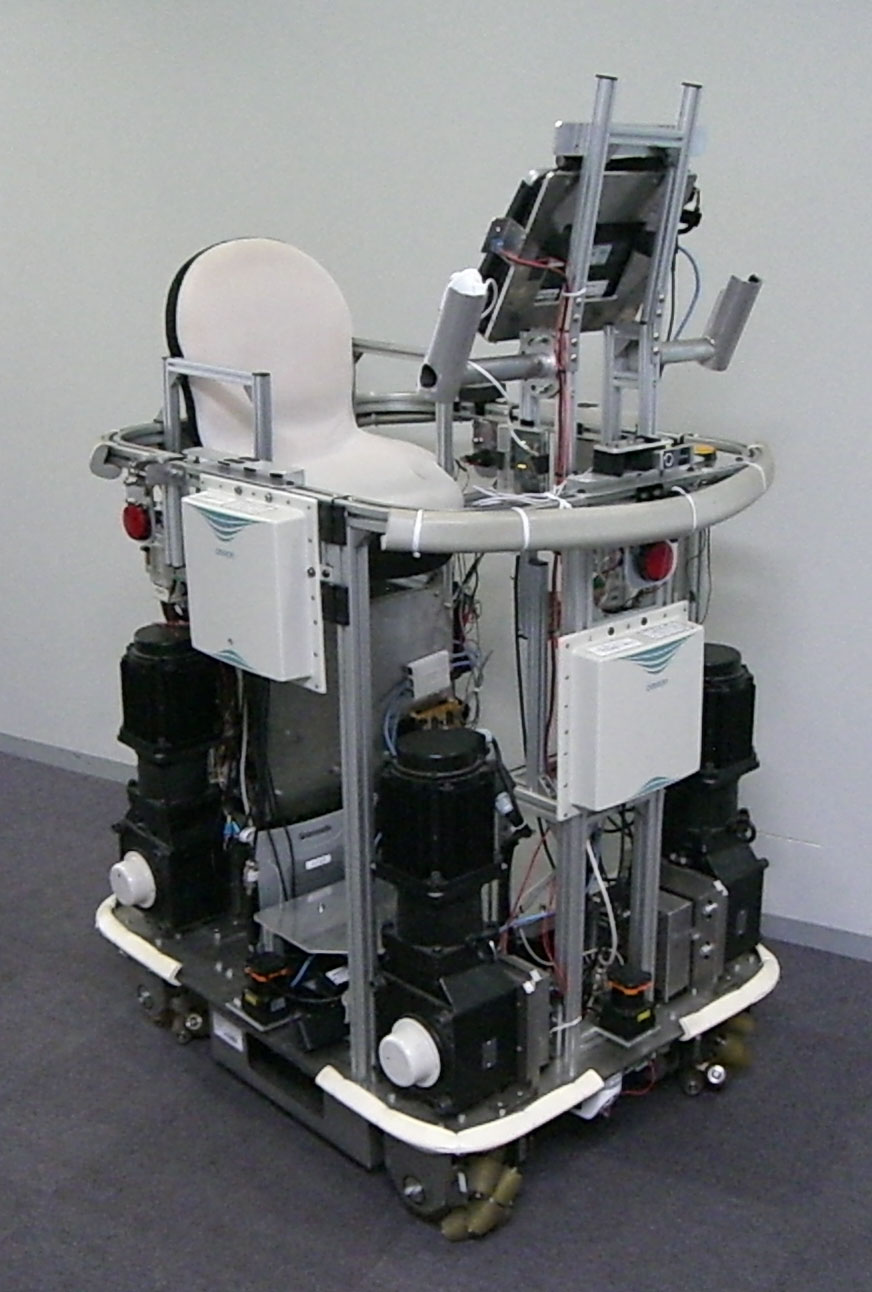
図1: 個人用知的移動体 AT
ATは搭乗者である人間や,AT自身を取り巻く環境に適応して移動する個人用の乗り物である(図参照).
ATは,周囲に障害物が多い場合に移動方向や速度を自動的に調整して安全な走行を支援したり,現在位置や移動履歴を考慮して搭乗者に適した情報を能動的に提供したりすることが可能である.このように,搭乗者である人間は特に意識することなく,実世界状況や文脈に合わせて,その時点で最適なサービスを受けることができる.
2.2 自動トランスポーテーション
ATは人間を乗せ,目的地まで自動的に走行する屋内自動トランスポーテーション.屋内自動トランスポーテーションでは,建物の地図を取得して搭乗者が目的地を設定し,その後ATが地図に基づいて自動走行する.この建物の地図はAT自身が常に保持しているのではなく,環境情報サーバと呼ばれる建物ごとに用意されたサーバが管理しており,ATは環境情報サーバから地図を取得する.また,環境情報サーバは建物内にいる全てのATと通信し,全てのATの動きを把握している.
ATには物体までの距離を測定可能なレーザレンジセンサ4個を前後左右に搭載しており,全方位の物体までの距離を測定可能である.ATはレーザレンジセンサで壁との距離を一定に保ちながら走行する壁沿い走行を行い,壁に貼られているRFIDタグをATに搭載されたRFIDタグリーダで読み取ることにより,自身の現在位置と地図との対応を取っている.
また,ATは目的地に向かって走行している時に障害物と遭遇した場合,ATに搭載されているレーザレンジセンサによって障害物を認識し,障害物を回避する.
2.3 自動トランスポーテーションの問題点
ATは,目的地に向かって自動走行している間に障害物と遭遇した場合,回避行動をとることによって障害物を避けることが可能である.しかし,障害物は必ずしも避けられるものとは限らない.例えば,荷物の搬入などで通路が一時的に塞がれてしまっていたり,混雑によって移動体が通行できない状態になってしまったりする場合である.本論文では,このように障害物が一時的に現れるような環境を動的環境と呼ぶ.
動的環境において,障害物は壁や階段のようにあらかじめ環境地図に通行できない旨を記載することができない.それゆえ,ATの自動走行の経路を構築する段階では環境地図に通行できないと記載されていない可能性があるため,結果的に通行できない場所を通るような経路を構築してしまう場合がある.ATが自動走行中にこのような障害物に遭遇した場合,回避行動をとっても回避することができないため,来た道を引き返し,環境情報サーバが保持している代替経路から適切な経路を送信するように要求し,経路を変更した後に目的地に向かうことになる.これでは搭乗者にとって時間の無駄になってしまう.そのため,通行できない通路を避けるように走行経路を変更しながら目的地まで向かう必要がある.
3 小型無人移動体(SUV)
本研究では屋内自動トランスポーテーションの問題点を解決するために,ATの外部から環境を探索する仕組みとして,自律移動が可能な小型無人移動体を開発した.

図2: 小型無人移動体SUV
小型無人移動体(Small Unmanned Vehicle.以後,SUVと呼ぶ)の外観を図に示す.
SUVにはレーザレンジセンサが搭載されており,障害物の認識や自己位置推定などを行うことが可能である.
本研究では,環境側に配備するセンサとして,を使用せず,自律移動可能な移動体にセンサを取り付けたものを使用している.
従来の環境設置型センサと比較した場合の利点として,見通しが悪い環境において網羅性があることや観測対象に対する距離や方向の自由度が大きいことが挙げられる.環境設置型センサの場合は,見通しが悪く,死角が多い場合,その領域をカバーするために別のセンサを設置しなければならない.しかし,SUVは自律移動が可能なため,ある地点からは死角であっても,移動することにより,死角だった場所を詳しく調べることができる.また,環境設置型センサは,観測対象に対して,ある一方向からしか観測することができず,遠くに存在する観測対象に接近することができない.しかし,SUVならば観測対象に対して接近し,回り込むなどして,より詳細で,より精度の高い情報が取得可能である.
4 小型無人移動体との連携による個人用知的移動体の自動走行の効率化
SUVは環境中を巡回し,障害物を探索する.SUVは障害物を発見した時に,通路のうち障害物によって塞がれていない部分の道幅を計測し,その値を環境情報サーバに通知する.環境情報サーバは各ATがこの通路を走行するかどうか,道幅はATの幅よりも広いかどうかということを基にATの経路を変更すべきかどうかを判断する.このように,ATが通行止めの現場に到着する前に動的に経路を変更することでATは効率的に走行することが可能になる.
実際にこの仕組みを使ったときの様子を述べる.図は実際に前述した仕組みを利用し,動的に経路変更を行ったときのATのコンソール画面である.丸で囲まれた矢印はATとその進行方向を表し,番号付きの正方形はRFIDタグを表す.図(b)(c)の5番タグは通行止めであることを表す.図(a)の7番タグと3番タグを結んでいる線と,図(b)(c)の6番タグと3番タグを結んでいる線はその時のATの自動走行経路を表す.
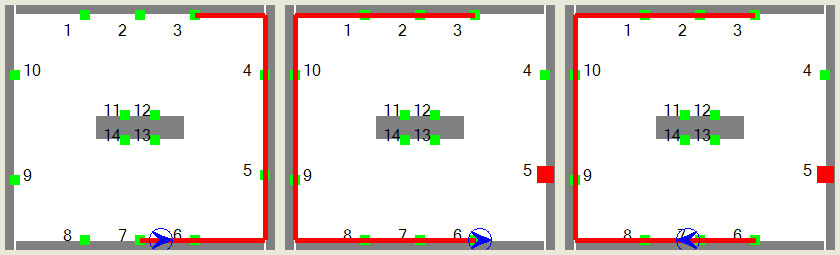
図3: (a)最短の経路で目的地に向かっている,(b)通行止め通路の発生により経路変更を行った,(c)変更後の経路を走行している (左から(a)(b)(c))
図(a)で,ATは7番タグから3番タグに図のような経路で向かっている.その後,SUVが5番タグの前を走行した際に道幅を測定し,環境情報サーバに通知したところ,環境情報サーバはATにとって行き止まりであると判断したため,ATに対して経路変更の通知を行った.その結果,図(b)で5番タグが通行止め状態になり,経路が変更された.そして,図(c)ではATが5番タグ,つまり,通行止めになっている場所に到達する前に経路を変更して目的地に向かっている.
5 おわりに
本研究では,動的環境において,人を乗せて自動走行可能な個人用知的移動体の自動走行の効率化を実現するためのシステムを提案・構築した.環境地図に基づいて自律走行する個人用知的移動体は,自身のセンサが届かない範囲の情報を取得することができないため,自律移動が可能な小型無人移動体を走行させ,環境地図を動的に更新することにより,個人用知的移動体は最新の情報を得られるため,効率的な自動走行を実現することができる.
今後の課題として,環境設置型センサと比べて同じ範囲を監視するのにかかるコストの比較をすることが挙げられる.