
個人用知的移動体による狭空間での安全走行支援
1 はじめに
近年の情報端末の高性能化に伴い、我々は情報端末からさまざまな情報を取得することができるようになった。それに伴い、獲得した情報をいかに自分の生活に活用できるかということが、我々の生活をより安全で快適なものにするために重要なものとなっている。
そこで我々は、人間の生活の中で最も基本的で重要な要素の一つである「移動」に着目し、乗り物を情報端末化して、情報処理と人間の物理的な移動を連動させ、安全に移動することのできるAT(AttentiveTownvehicle) と呼ばれる個人用知的移動体を開発している。AT に搭乗してマニュアル走行を行う際は、ジョイスティックを利用することによって搭乗者の行きたい方向(以下、指定方向) に自由に移動することができる。しかし、障害物等によって走行の幅を制限された狭空間においては、搭乗者の認識や目測の誤りにより障害物と衝突する可能性が高いだけでなく、たとえ障害物と衝突することなく移動することができたとしても、複雑で細かい操作を必要とする。
そこで本研究では、指定方向へ移動すると衝突する危険がある場合に、搭乗者の入力を受けてAT が移動する方向と速度(以下、移動方向と移動速度) をシステム側で調節することによって簡単な操作で障害物に衝突することなく移動を行う手法を提案する。
具体的には、レーザレンジセンサで取得した全方位の障害物までの距離情報から、搭乗者から入力された情報を元に、安全に走行できる速度と、障害物に接触することなく移動することができる角度を計算し、移動方向と移動速度を決定する。
2 個人用知的移動体AT
AT は、搭乗者である人間や、AT 自身を取り巻く環境に適応して移動する個人用の乗り物である。最大の特徴の1 つは、駆動系にメカナムホイールと呼ばれる複合車輪を用いていることである。このホイールは、図のように、一つの車輪にその車軸に対して45 度傾けられた小さな車輪が複数付いている構造となっている。従来行われている狭空間を安全に走行するための研究では、移動する方向に制限があった。しかし、この車輪を用いると、全方位への平行移動やその場回転を行うことが可能であるため、より効率のよい移動が可能となる。
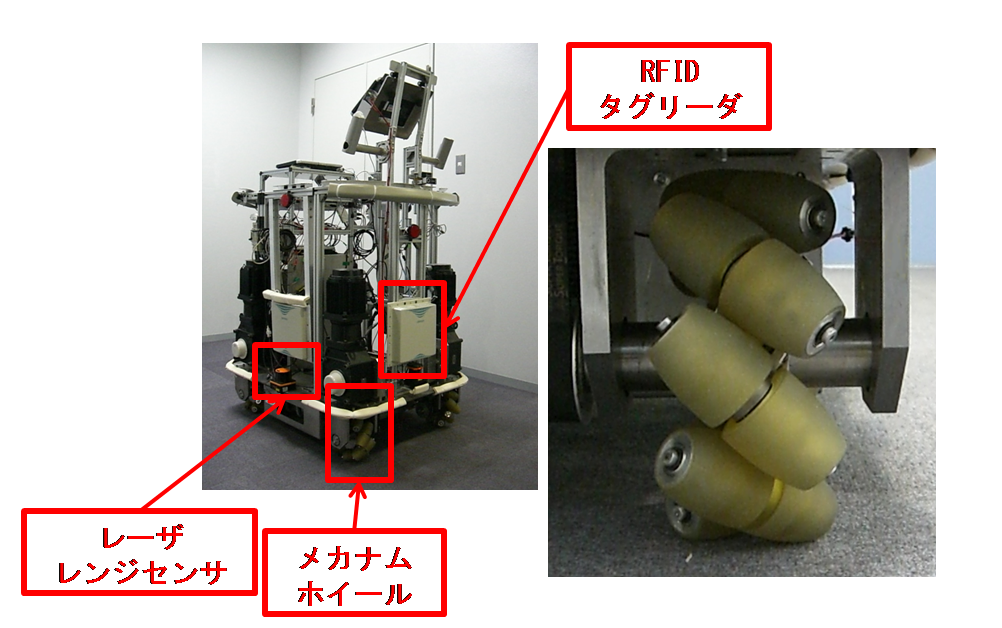
図1: 個人用知的移動体AT(左)とメカナムホイール(右)
AT は周囲の情報を取得するためにレーザレンジセンサ、RFID タグリーダ、および3 軸角度センサを搭載している。また、各種設定と情報の閲覧にはタッチパネル、マニュアル走行にはジョイスティックを利用しており、搭乗者にとって直感的で分かりやすいものとなっている。
AT に搭乗してマニュアル走行を行う場合は、ジョイスティックを倒した向きと傾きから移動方向と移動速度を決定することによって搭乗者の意図する方向へ自由に走行することが可能である。また、ボタンを押しながらジョイスティックを倒すことによってその場回転を行うことも可能である。
3 狭空間での安全走行支援
2 章で述べたように、AT がマニュアル走行する際は、搭乗者がジョイスティックを任意の向きに倒すことによって、意図する方向へ走行することが可能である。本手法では、指定方向へ移動すると衝突する危険がある場合、レーザレンジセンサで取得した障害物の距離情報を元に以下のように速度と移動方向を調節することによって障害物との衝突回避を行う。
3.1 速度調節
速度の調節は、周囲にある障害物までの距離に応じて減速させる割合を決定する。
速度調節を行う範囲は、搭乗者の指定方向から±90度以内にある障害物を対象にしている。障害物がATから離れている場合は、近づくまで衝突する危険性がないため、速度調節を始める範囲を100cm と設定した。さらに、指定方向の正面でない場所にある障害物においては正面にある障害物と比べて障害物に衝突する可能性が低いため、速度調節を始めるための障害物までの距離を短くし、50cm とすることで不必要な減速を行わないようにした。また、減速を行う対象となる指定速度の下限値はあらかじめ決められている。
以上のことを考慮して、図のように速度調節を行う範囲を設定した。これにより、移動に危険が生じない障害物においては減速することなく、移動に危険が生じる障害物との距離のみに応じて減速させることができる。
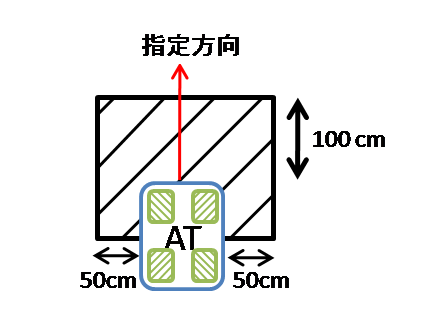
図2: 速度を考慮するエリア
3.2 移動方向調節
指定方向からの移動方向の調節は、レーザレンジセンサから1 度ごとに取得した図3 のような全方位の距離情報を利用して、以下の方法で移動方向を決定している。
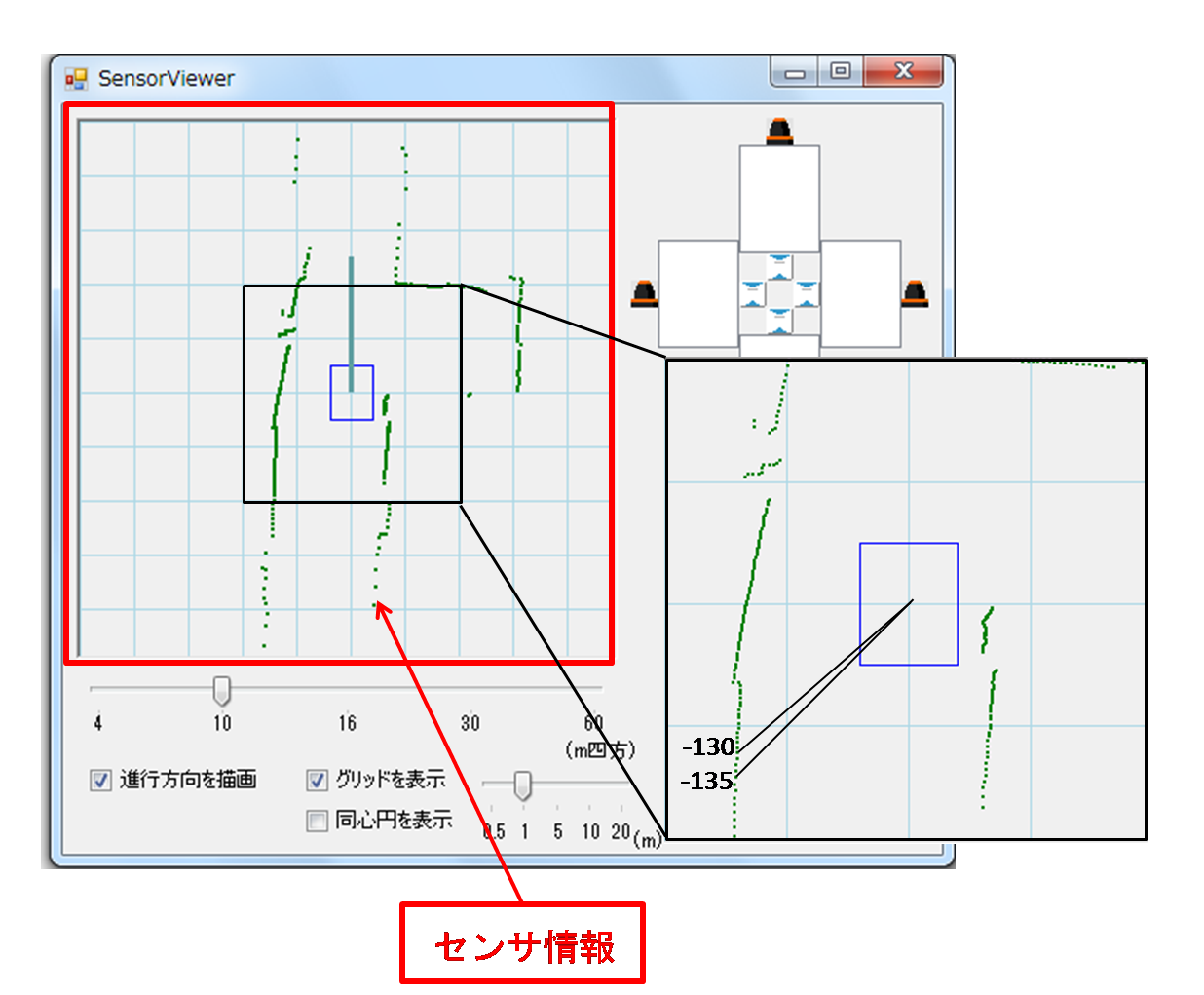
図3: レーザレンジセンサが取得した全方位の距離情報
まず、全方位の距離情報から、AT の走行可能空間を検出する。AT から一定距離範囲内にある障害物同士の間隔がAT の幅より大きい場合を走行可能空間と定義する。
そして、指定方向と走行可能空間の中心との角度差を計算し、計算された角度差が一番小さい方向を移動すべき方向として、移動方向を決定する。
しかし、実際に移動する際に、搭乗者の指定方向と全く異なる方向へ移動してしまっては、搭乗者の意図と一致しない。そこで、移動方向を搭乗者の指定方向から±90 度以内にすることで、搭乗者の指定方向と全く異なる方向へ進むことを防止している。
図のような狭空間を走行する場合、搭乗者の入力だけに従って走行すると搭乗者は何度も入力を変更しなければならない。しかし、システムが移動方向の調節を行うことで、搭乗者の入力を変更しなくても障害物と衝突することなく走行することができる。
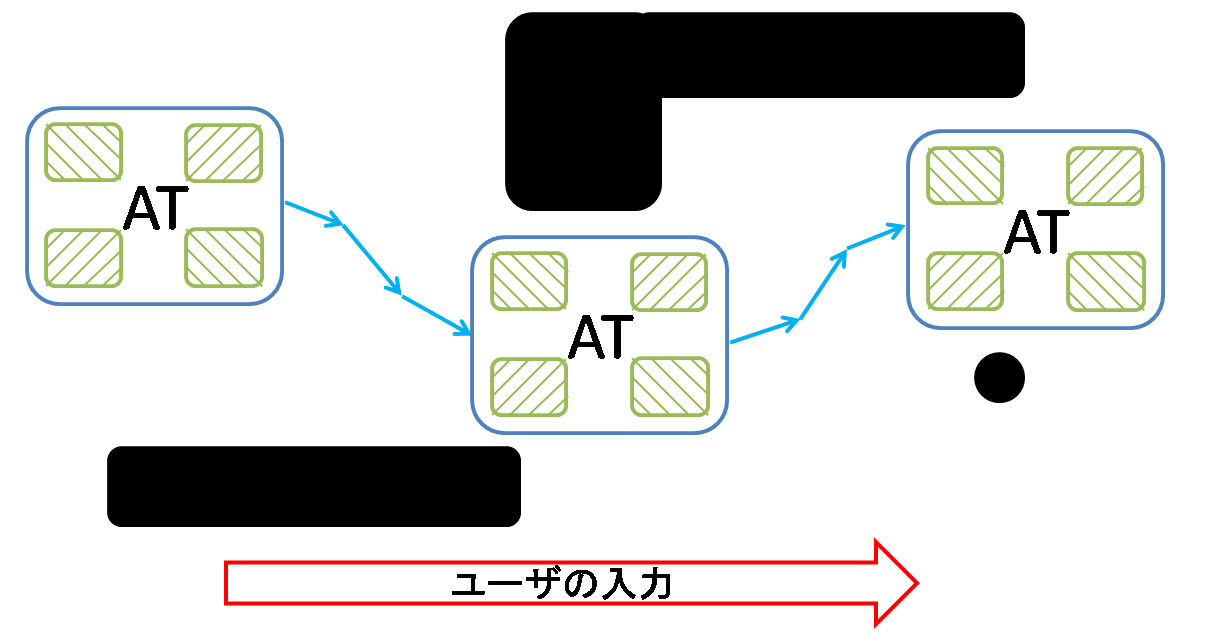
図4: 狭空間における移動例
しかし、ただ障害物を避けるように移動方向を調節して走行を続けると、本来走っていたコースから大きく逸れてしまう場合や、廊下等で壁沿いを走行していたのに障害物を避けることで廊下の中心へ移動し、そのまま移動を続けることで歩行者などの邪魔となる場合がある。そこで、移動方向を調節した後に、障害物を回避する前に走行していたコースへ戻るという機能を追加した。これによって、障害物を回避する前に走行していたコースへ戻ることができ、障害物を回避した後で走るコースが大きく逸れてしまうことを防ぐことができる。
4 まとめと今後の課題
本研究は、障害物等によって走行の幅を制限された狭空間において、搭乗者の認識や目測の誤りによって障害物と衝突する可能性が高く、障害物を避けるには複雑で細かい操作が必要な場合に、障害物との距離に応じて移動方向と移動角度を調節することで、搭乗者の操作は単純でも障害物と衝突することなく走行ができる手法を提案した。
現在の手法は障害物が静止していることを前提としているため、障害物が移動している場合は適切に回避を行うことができず、衝突する可能性がある。今後は、移動する障害物の動きも考慮した上で移動速度や移動方向の調節を行う必要がある。
また、搭乗者の運転スキルなどに関係なく一律に速度調節や移動方向調節を行っているため、搭乗者の予想以上に速度が低下してしまうなど、搭乗者が快適に走行することができない場合が存在する。そこで、搭乗者の運転スキルに応じて速度や移動方向の調節を行う度合を変更することによって、搭乗者がより快適に移動を行うことができると考えられる。