
小型無人移動体による個人用知的移動体のセンシング領域の拡張
1 はじめに
我々の研究室では、個人用知的移動体AT(Attentive Townvehicle)と呼ばれる、搭乗者が指定した目的地まで自動的に移動する個人用の乗り物の研究・開発を行っている。
自動走行する移動体の問題の一つは搭乗者の安全性である。この問題に対して移動体自身が持つセンサーでは十分ではなく、いかに環境側に周囲の情報を収集し伝達する仕組みを実現するか、ということが重要となる。搭乗者の安全性のために知りたい環境情報とは、例えば進行方向の死角から接近する移動障害物の情報である。
そこで本研究では、ATの前方に小型無人移動体(Small Unmanned Vehicle)を走行させ、それをATの拡張センサーとして扱い、ATのセンシング領域を拡張することで、障害物に関する情報をより多く収集する仕組みを実現した。
2 個人用知的移動体AT
ATは乗り物に情報処理・通信機能を持たせ、情報処理と人間の物理的な移動とを連動させることにより、人間の活動をより便利にするための乗り物である。その機能の一つとして、搭乗者がATに搭載された情報端末から目的地を入力することで、自動的に目的地まで移動する機能がある。この機能は具体的には、ATに搭載されたRFIDタグリーダーで環境中に設置されたRFIDタグを読み取ることで現在地を知り、地図を用いて目的地への経路を決める。さらに、ATに搭載されたレンジセンサーで障害物情報を認識し、メカナムホイールという特殊なホイールにより全方位移動で障害物を回避する。レンジセンサーは物体にレーザー光をあて、その反射光を受光して物体までの距離を算出し、これを一定角度間隔で測定することで、平面上に物体までの距離を知ることができるセンサーである。ATはこれを前後左右の4箇所に搭載し、その情報を統合することで全方位の障害物情報を知ることができる(図参照)。しかし、AT自身のセンサーでは、交差点の左右からの通路などの死角から接近する移動障害物を検出することはできない。本研究では、安全な自動走行を目的とし、死角からの移動障害物が検出できない問題を解決するために、次に述べるセンシング領域の拡張を行った。
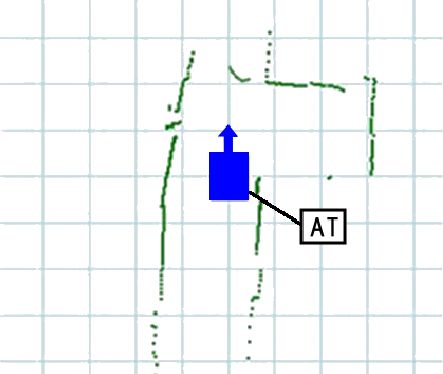
図1: レンジセンサーによる障害物情報の取得
3 センシング領域の拡張
ATのような自動走行する乗り物は、周囲の環境情報をセンサーによって取得することで行動を決定する。しかし、自身に搭載されたセンサーだけでは取得する情報は限られており、これによって起きる問題の一つの例が先ほど挙げた、死角から接近する移動障害物の問題である。その他にも自分の進行方向のかなり先の状況を前もって知ることができれば、回避できる事故は多くある。これらの考えから本研究では、ATの進行方向を、外部拡張センサーとしての小型の無人移動体を走行させることにより、AT自身のセンシング領域を拡張する手法を提案する。外部拡張センサーはATの自動走行と連動して動く必要があり、このセンサーで取得した情報をATのセンサー情報と統合するには、このセンサーの位置を知る必要がある。これらの機能については次章で詳しく説明する。
図は、実際に、ATと外部拡張センサーが連携して走行している様子で、図は、情報を統合して拡張されたセンサー情報である。この図により、ATのセンサーでは死角になっている領域の障害物情報が取得できていることが分かる。

図2: ATとSUVの連携走行
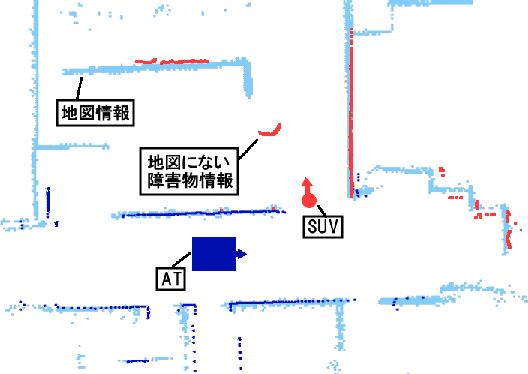
図3: SUVによるATのセンシング領域の拡張
4 小型無人移動体とその機能
本研究ではATと連携して自律走行する小型無人移動体(Small Unmanned Vehicle、以下SUV)を製作し、センシング領域を拡張するための拡張センサーとしての機能を実装した。具体的には以下の4つの機能である。事前に実環境を走行することにより、レンジセンサーによる環境地図を生成する機能、生成された環境地図上でのSUVの現在地を推定する機能、環境地図と現在のレンジセンサーの値を比較することで、人間など地図には存在しない障害物を検出する機能、ATの目的地を認識して、ATと連携して走行する機能、である。これらについて詳しく説明する。
4.1 地図生成
ここでいう地図生成とは、移動体のオドメトリ情報(これまでの移動距離情報)とセンサー情報を用いてセンサー地図を作ることである。オドメトリ情報とセンサー情報はどちらも誤差を含む情報であり、正しい位置と地図を同時に推定しなければならない。これはSimultaneous Localization and Mapping (SLAM)問題として知られる問題である。SLAM問題とは、ある時刻までのセンサー情報
とオドメトリ情報
が与えられた状態での、姿勢
、地図情報
である事後確率
の分布関数を求め,最尤の
と
を決めることである。本研究ではFastSLAMやDPSLAMで知られるような、パーティクルフィルタを用いた地図生成を実現した。
4.2 位置推定
位置推定とは、
、
が与えられた状態で、
である事後確率
を求め、最尤の
を決めることである。アルゴリズムは地図生成とほぼ同じでパーティクルフィルタを用いた方法である。位置推定は走行中に地図情報
が既知の情報としてわかっているため、地図生成よりもロバストである。ただし、SUVが走行中に実時間で位置推定を行う必要があるため、パーティクルの数と処理するセンサーの分解能を地図生成よりも減らすことで、計算時間を短縮した。
また、同様の仕組みをATに組み込み、共通の地図で位置推定を行うことにより、ATとSUVの現在地を同じ座標系で表した。これによってSUVのセンサー情報をATのセンサー情報と統合することが可能となる。
4.3 障害物検出
環境地図上でのSUVの現在地を推定した後、環境地図と現在のセンサー情報との差分の情報、つまり移動障害物や通常時には置かれていない静止障害物などの情報を計算する。SUVはATのセンシング領域を拡張するための拡張センサーであるため、ATがこのセンサーから知りたい情報は壁など地図に載っている情報ではなく、障害物の情報である。したがって、この機能は拡張センサーとしての重要な機能である。しかし、SUVのオドメトリに大きな誤差が生じた場合、SUVの位置推定は正しい位置からずれてしまい、環境地図とセンサー情報がずれているため壁のセンサー情報まで障害物として認識してしまう。それによって、移動障害物を誤認識してATが回避行動をとってしまうなどの問題が起きる。そのため、本研究では位置推定の精度をパーティクルの分散で求め、これが高い時のみ障害物検出を行うことによって解決した。
4.4 ATとの連携走行
ATが情報端末から目的地を入力すると、目的地はATとSUVが共有する地図上での座標に変換され、SUVに送られる。SUVはこの座標と地図情報から経路を生成し、自律移動を開始する。ATはSUVの現在地をSUVとの通信で把握し、SUVと接触しないように自身の速度とSUVの速度を調節する。
5 まとめと今後の課題
本研究ではATが自動走行する際に連携してSUVが自律走行し、ATのセンシング領域をSUVのセンサーによって拡張する仕組みを実現した。その仕組みによって、ATの搭乗者は自動走行中、自身の死角から接近する障害物を確認することができるようになった。これにより、ATなどの自動走行をする乗り物はより安全に移動することができる。今後の課題としては、SUVによってセンシングした情報の応用について、さらに研究を進める必要がある。さらに、SUVがセンシングする情報をレンジセンサーだけではなく、深度センサーやカメラなど、センシングできる情報を増やすことで、より拡張センサーとしての機能を高度化することも課題の一つである。