
地図情報に基づく個人用知的移動体の柔軟な屋内自動走行
1 はじめに
近年の情報端末の小型化・高性能化に伴い、我々は常に情報端末を持ち歩くようになった。この傾向により、小型情報端末は人間の置かれた状況を認識し、それに応じた情報提供をするようになった。しかし小型情報端末では、情報処理結果を直接的に人間の行動に反映させることができない。そこで我々は、乗り物を情報端末化して情報処理と人間の物理的な移動とを連動させるという考え方のもと、AT (Attentive Townvehicle)と呼ばれる個人用知的移動体を開発している。
本研究の背景に、ATを用いて搭乗者である人間を目的地まで自動的に移動させるという、屋内自動トランスポーテーションがある。このシステムは、搭乗者がAT上で目的地を設定するとその目的地まで安全に自動走行し、その走行途中において搭乗者の状況や要求に応じた施設内の様々な場所や対象物に関する情報、あるいは目的地に関する詳細情報を搭乗者に対して提示するものである。またこのシステムは、美術館や博物館、さらには総合病院や空港のような大規模屋内施設での利用を想定している。
本研究では、屋内自動トランスポーテーションの中心となる屋内自動走行をRFID (Radio Frequency Identification)タグをランドマークとした地図情報ベースの位置認識手法により実現した。また時々刻々と変化する周囲の環境や、複数の人間と複数の移動体が同じ物理的環境を共有する状況でも適切に対応できる柔軟性の高い屋内自動走行システムの開発を目的とする。
2 個人用知的移動体AT
ATは、搭乗者やAT自身を取り巻く環境に適応して移動する個人用の乗り物であり、駆動系に用いたオムニホイールにより全方位移動とその場回転を行う。
周囲の情報を取得するためATは、全方位に最大30mまで物体を検知可能なレーザレンジセンサとタグを読み取るためのRFIDタグリーダ、3軸角度センサを搭載している。また各種設定にはタッチパネルを、マニュアル操縦にはジョイスティックを用いるなど、ATのユーザインタフェースはわかりやすい直感的なものとなっている。
3 屋内自動走行
環境設置型のガイドなしに自動走行を実現する手法として、車輪の回転速度により移動体の自己位置を推定する方法がある。しかし、この手法は走行距離に伴って増加する推定誤差が無視できない。そこで本手法では、屋内を壁との距離を一定に保って走行する壁沿い走行をすることで地図との対応を取りやすくし、さらに壁に設置したRFIDタグを推定位置補正のためのランドマークとした。以下では、地図を用いてどのように自動走行を実現するのかについて述べる。
3.1 地図情報
ATが自動走行の際に用いる地図を図に示す。またATに与える地図情報は以下の2つである。
-
施設内の各部屋や階段等、ATが進入不可能な領域の位置
-
ランドマークとなるRFIDタグのID・位置と属性
地図作成時は領域の頂点座標とタグの位置座標・属性をデータベース上に登録する。その際、位置認識の精度向上やタグの座標の機械的な入力を考慮してRFIDタグは一定間隔で設置するようにした。RFIDタグは軽量かつ電源を必要としないので設置に関するコストは低いと考えられる。
またRFIDタグは、そのタグの付近の壁に存在する搭乗者にとっての有用な情報の有無を示す属性を有する。壁に有用な情報がある場合、搭乗者は壁側を向きながら走行する。これは美術館や博物館での利用を想定したもので、目的地設定時に興味のある展示物・ジャンル等を選択し、それによってタグの属性を変化させる。
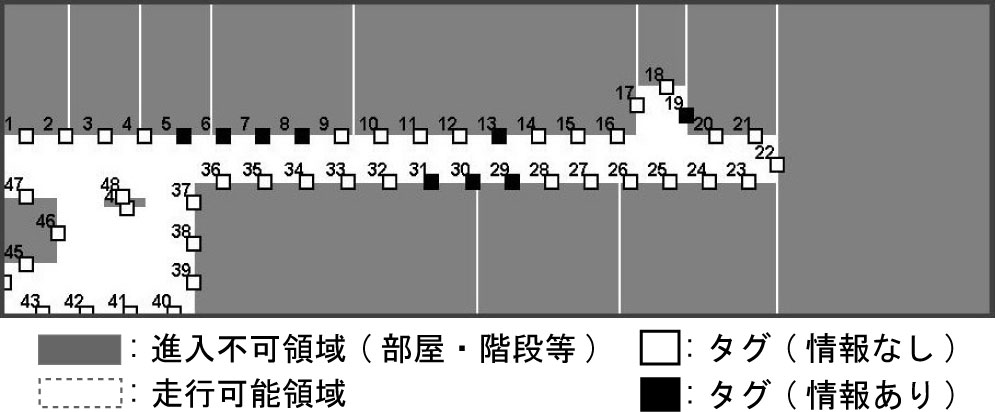
図1: ATが保持する地図
3.2 経路生成と動作プランニング
まず近くの壁に接近して現在位置のランドマークとなるRFIDタグを決定し、次に現在位置を示すタグから目的地を示すタグまでの経路を計算する。経路とは、目的地まで走行する途中で通過すべきRFIDタグのIDを通過すべき順に並べたものである。可能な限り距離を短く、そして壁沿いを走行する経路になるようにパラメータを決定する。
経路決定後、動作プランを決定する。動作プランとは図に示す6つの各タグ間の基本動作を組み合わせたものであるが、隣接するタグ間の基本動作は地図情報から算出可能で、これらと経路を組み合わせることにより自動生成される。図の1?5の5つの基本動作にはそれぞれ進行方向があり、それらをつなぐための動作として6番目の「その場回転」動作を含む。ゆえに、右左折時あるいはタグの属性や開始位置における向きよって、「その場回転」動作をプランの適切な位置に加えるプランニングを行う。
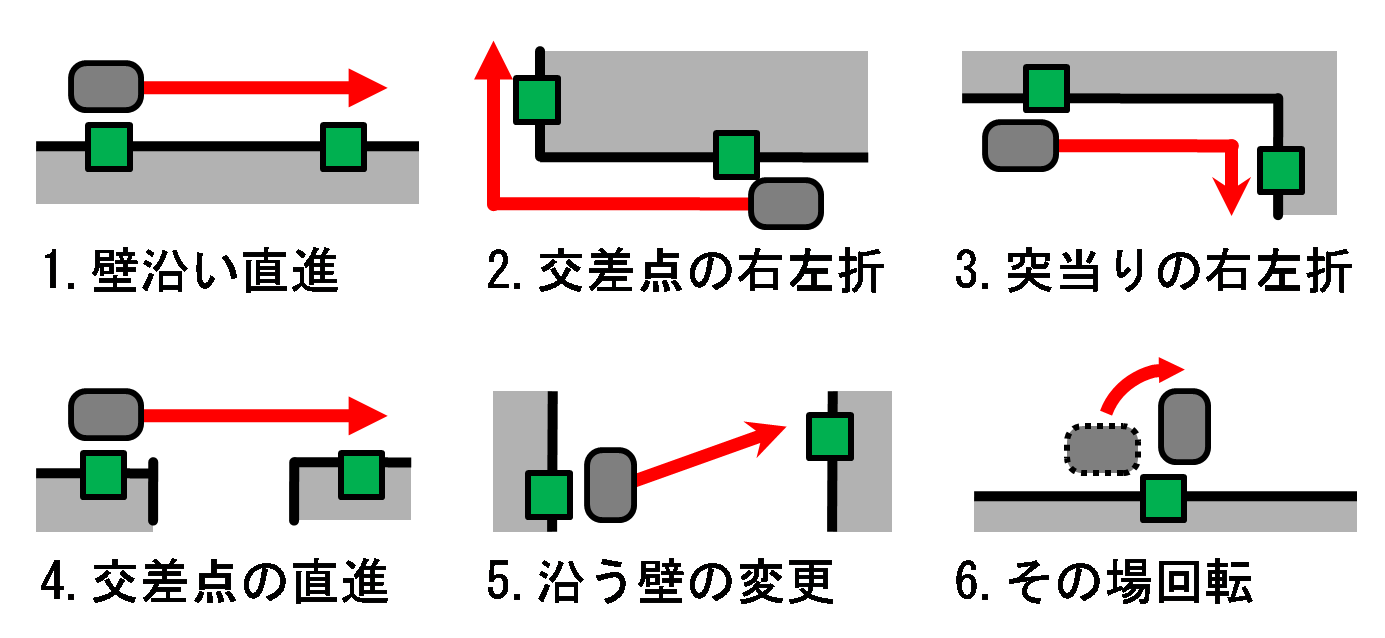
図2: 6種類のタグ間基本動作
3.3 走行タスクの生成
走行タスクとは、以下に示すATのモータを制御する5種類のプロセスを組み合わせたものを意味し、動作プラン中の各基本動作は、これらのプロセスを組み合わせることにより実現される。
-
ATから見て指定した方向にある壁に近づくプロセス
-
指定したATの側面をATから見て指定した方向にある壁と平行にするプロセス
-
目的のタグが見つかるまで直進するプロセス
-
ATから見て指定した方向にある壁との距離が指定した値以上・以下になるまで直進するプロセス
-
ATを指定した角度分その場回転させるプロセス
各基本動作に対するプロセスの組み合わせは決まっているため、走行タスクは動作プランから一意に決定可能である。屋内自動走行は、このプロセス群をシーケンシャルに処理していくことで実現できる。
4 複雑な環境下での屋内自動走行
美術館等での実用化を想定する環境で適応可能な屋内自動走行システムにするためには、地図上にない障害物や人間が存在する環境でも安全な自動走行が可能でなければならない。また、ATは自律移動ロボットとは異なり人間を乗せて走行する移動体であるため、自動走行中における搭乗者の経路変更や手動操作の要求を許容できるような柔軟性を持ち合わせている必要がある。ゆえに、自動走行中の状況が変化してもATがそれを認識した上で行動を変化させられるような仕組みを構築した。
4.1 移動体と障害物・人間が混在した環境下
走行中、進行方向に静止障害物が存在したり、近くに人間が存在したりする場合は、壁沿い走行を継続するより、目の前の障害物を回避することの方が優先となる。その場合に壁沿い走行を中断し、移動体の周囲の状況を把握するためのレーザレンジセンサを駆使して障害物や人間を巧みに回避する制御方法に切り替える。ただし、回避中もランドマークによる現在位置認識を継続し、周囲に障害物や人間が存在しなくなったときに現在位置から当初の目的地までの経路・動作プランを再計算して壁沿い走行を再開する。
4.2 搭乗者による経路変更を想定した環境下
美術館や博物館などにおいて、目的地を設定する段階で決定した展示物だけがその搭乗者の興味の対象とは限らない。当然、走行途中で偶然目にしたものに興味を抱くことがある。それゆえ、走行した経路周辺にあった展示物の情報を提示し、搭乗者が再度見たい展示物があれば自動走行中であっても一旦停止して、その展示物の場所まで経路を変更して戻ることを可能にする。
また、壁沿い走行途中に搭乗者がジョイスティックを操作し運転を開始した場合にも、再度搭乗者が自動走行を開始するまで壁沿い走行は中断する。搭乗者の手動操作により停止した位置と再開位置に大幅なずれが生じても、ランドマークによる位置認識と走行経路の再プランニングにより対応できる。
5 今後の課題
本研究における屋内自動走行は図に示した6つの基本動作からなる壁沿い走行であるが、複雑な構造をした屋内施設では、この6種類の動作だけでは走行不可能な場所が存在する。今後は、より多くの屋内施設で対応できるようタグ間の基本動作の種類を増やす必要がある。さらには、走行中にタグを読み飛ばしたり、壁との距離が離れたりしても対応できる高い信頼性の追究も必要不可欠となる。
また、移動体をカスタマイズ可能にして、移動あるいは停止時に、搭乗者の近くにあり、かつ好みに合った展示物を搭乗者に対して推薦する機能も実現する予定である。