
小型無人移動体との連携による個人用知的移動体の安全走行
1 はじめに
我々の研究室では、個人用知的移動体AT (Attentive Townvehicle)と呼ばれる、搭乗者の行きたい場所まで自動で移動する個人用の乗り物の研究・開発を行っている。自動走行する移動体の最大の課題は移動体が歩行者などの移動障害物に衝突することなく安全に目的地までたどり着くことである。衝突回避をしながら、自動走行をする移動体の研究は多くあるが、移動体の死角から接近する移動障害物との衝突を回避することは従来の研究では困難である。特に安全性が求められる自動走行可能な乗り物にとって、この問題を解決することは必要不可欠である。
この問題に対して、見通しの悪い交差点などに移動障害物の接近を感知して表示するデバイスを設置する方法や、音情報から物陰の人物認識を行う研究が行われてきたが、前者は環境に網羅的にデバイスを設置することは難しく、後者は複雑な環境(音が入り乱れている環境)での誤認識が問題である。そこで本研究では、自律走行可能な小型無人移動体(SUV: Small Unmanned Vehicle)をATの拡張センサーとして用いることでこの問題を解決する手法を提案する。
2 個人用知的移動体と小型無人移動体
ATは移動体に情報処理・通信機能を持たせ、人間の物理的な移動と情報処理を連動させることにより、人間の活動をより便利にするための乗り物である(図)。その機能の一つとして、自動で目的地まで移動する機能がある。
さらに、ATには移動障害物を検出するために前後左右の4箇所にレーザーレンジセンサーが搭載されている。このセンサーによりATは全方位の障害物までの距離情報を知ることができる。図はAT が認識した静止障害物と移動障害物の図である。青い四角が ATで、緑の線が壁などの静止障害物、ピンクの図形が移動障害物の位置と向きを表している。しかし、AT自身のセンサーでは交差点の左右からの通路などの死角から接近する移動障害物を、十分に回避が可能なタイミングで検出することはできない。
そこで本研究では、ATのような乗り物がより確実に安全に自動走行をすることを目標とし、死角から接近する移動障害物を適切に回避するという問題を、SUV(図)と連携して解決する方法を提案する。SUVはATと同じく目的地まで自動的に行く機能を持つ。ATとSUVの具体的な連携方法は4章で説明し、3章ではSUVが連携時に使う重要な機能について説明する。

図1: AT(右)とSUV(左)
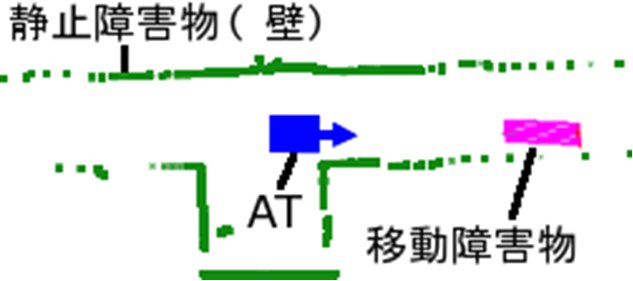
図2: レンジセンサーによる障害物情報の取得
3 注意区間の検出
注意区間とは、ある経路上を走行する際に、進行方向前方の視野外から接近する移動障害物と衝突する可能性がある場合、それを回避するために特に注意を払う必要がある、経路上の区間を指す。直感的な説明をすれば、車を運転する際に建物などで視野が制限され危険を感じる場所を、徐行して走行する区間とほぼ同義である。SUVをATの拡張センサーとしてATの安全性を向上させるためには、ATが自動走行する際に通る経路上の注意区間にSUVを向かわせ、ATの死角となる領域を前もってセンシングする必要がある。
ATとSUVが自動走行を行える環境には、事前に環境中を走らせた走行記録から自動生成した環境地図(図)が用意されている。この環境地図には環境中の障害物の位置関係の情報が表されている。環境地図上で目的地が与えられたときにその地点にたどり着く経路を自動で生成する(図)。この経路上の注意区間を自動で検出する手法を簡単に説明する。
注意区間は定義の性質上、移動体の状態・性質によって判断基準があいまいである。そこで、事前に複数の人間の判断によって注意区間を調査したところ、次のような傾向が見られた。以上の方針に基づいて環境地図から注意区間を検出する手法を実現した。図は実際に検出した注意区間である。
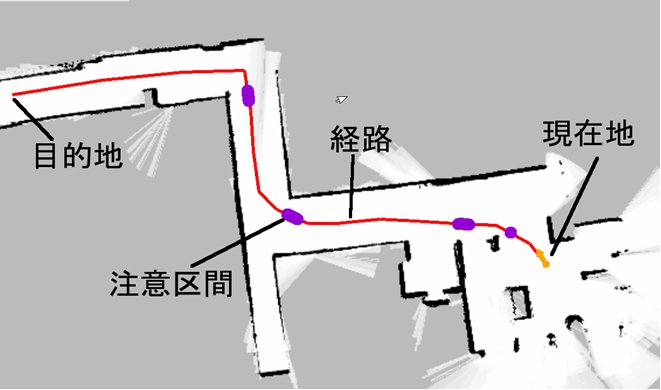
図3: 環境地図と検出された注意区間
4 連携走行による安全走行
ATの搭乗者がタッチパネルディスプレイにより目的地を入力し、自動走行を開始するのと同時に、ATは目的地までに経路を生成し、その経路をSUVに送信することで、ATとSUVは同時に同経路を走行開始する。SUVはATよりも速い速度で自動走行を行い、注意区間付近で速度を落とし、移動障害物の出現に備える。さらに注意区間の終点に着くと完全に停止し、ATが一定距離に近づくまでATの死角から接近する移動障害物がないか監視し続ける。移動障害物が現れたときは、SUVは移動障害物と衝突しない位置に移動し、移動障害物が通り過ぎるのを待つ。移動障害物を認識した時点でATにその情報を伝達する。移動障害物が現れないときはATの接近に伴ってSUVは次の注意区間まで移動を再開する。
SUVのセンサー情報は走行中常に送信され、ATはSUVのセンサー情報を自分のセンサーと同じように処理することができる。図4の右側はATのタッチパネルディスプレイから見ることができる画面である。SUVの取得したセンサーが反映されているのが分かる。
SUVを用いた安全な自動走行の仕組みは、ATのセンサーで検知できない領域から接近する移動障害物を事前に検出し、ぶつからないように停止するといった動作である。単純ではあるが、移動障害同士の衝突の多くはお互いがお互いを認識することなく移動し続けた場合に発生する。SUVを用いたこの仕組みは、移動障害物の認識を早め、その障害物との衝突の危険性が十分に低くなるまで停止する仕組みであり、移動の安全性を大幅に向上させることができると考えられる。
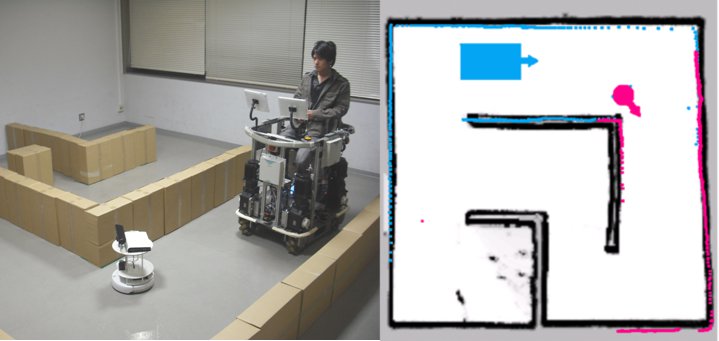
図4: 注意区間で停止するSUVとその時のATのコンソール画面
5 まとめと今後の課題
本研究では、個人用知的移動体をいかに安全に自動走行させるか、という問題に対して小型無人移動体を前方に走行させ障害物を探索させるという仕組みを提案し、実機で実現できることを確認した。この仕組みを実現する際にSUVの機能として注意区間を検出する手法を新たに提案した。SUVは検出した注意区間にATより先に移動することでATは自動走行中に、死角から接近する移動障害物との衝突を回避することができる。
SUVとATの連携走行によるデメリットの一つは、ATが単独で走るよりも交通状況を複雑化してしまうことである。これは、SUVは現在の大きさでは交通の邪魔になる可能性があるためで、将来的には野球のボール程度のサイズになることでこの問題は解決できる。SUVをより実用的な仕組みにするためには、SUVの小型化は今後の課題の一つである。