
個人用知的移動体による狭空間での安全走行支援に関する研究
概要
個人用知的移動体AT は、搭乗者やAT 自身を取り巻く環境に適応して移動する 個人用の乗り物である。AT はレーザレンジセンサと呼ばれる周囲の物体までの距 離が測定できる装置を搭載しており、360 度全方位の障害物までの距離情報を取得 することができる。また、駆動輪にメカナムホイールと呼ばれる複合車輪を用い ており、全方位への平行移動やその場回転を行うことが可能である。AT に搭乗し てマニュアル走行を行う場合は、アナログスティックを利用して搭乗者が方向と速 度を指定することで、搭乗者の意図する方向と速度で走行することが可能である。 しかし、障害物等によって走行可能な幅が制限される狭空間においては、搭乗者 の認識や目測の誤りによって障害物と衝突してしまう可能性が高いため、搭乗者 は、周囲の障害物との距離に気を配りながら複雑で細かい操作を行う必要がある。 そこで本研究では、狭空間において簡単な操作で安全に走行するための搭乗者の 操縦の支援手法を提案する。
狭空間における移動の支援として、搭乗者の指定した方向と速度を基に、レー ザレンジセンサで取得した障害物までの距離情報を利用して、速度と移動方向を 調節する補助走行を実現した。障害物までの距離に応じて減速することで、安全 に走行できる速度を決定する。また、AT が走行可能な空間を検出し、その空間へ 移動するための方向を決定する。これにより、狭空間を走行する場合、搭乗者が指 定する方向を細かく変更することなく障害物との衝突を回避しながら走行するこ とができる。障害物回避中に移動方向と指定方向との差分を記録しておき、障害 物を回避後に回避前に走行していたコースへ戻ることによって、障害物の回避前 後で走るコースが大きく変化してしまうことを防ぐことができる。また、AT を駐 機する場合の支援として、搭乗者が方向を指定すると、指定した方向にある隅や 袋小路などの人の邪魔になりにくい場所へ自動的に移動を行う仕組みを実現した。
上記の補助走行に関して、狭空間において障害物と衝突することなく簡単な操 作で安全に移動することができるか実験を行った結果、提案手法の有効性が確認された。
1 はじめに
人間にとって「移動」は生活に必要不可欠なものであり、移動をより便利にするために我々は自動車やバイク等、人間の操縦により高速に動く乗り物を開発し てきた。乗り物を利用することによって、多くの物や人を同時により簡単に移動 させることができるようになった。しかし、移動が速くなるということは、より 多くの危険が伴うことにつながる。歩行時は移動速度が遅いため、障害物を直前 で回避することができるが、乗り物に乗っていると歩行時より移動速度が速くな るため、障害物を直前で回避することができず衝突してしまう場合がある。この ような衝突を回避するために、歩行者と車両の移動する道を分離し、交通ルール を設けてきた。
しかし、依然として全国の自動車の交通事故は1年に70万件以上発生しており、 常に事故の危険と隣り合わせである。 そのため、運転する際には事故に対する不安が常に付きまとうことになる。 交通事故が発生する原因の7割以上は搭乗者の不注意であり、 運転手がよく注意すれば防ぐことができるものである。 しかし、運転手が常に周囲に気を配りながら運転し交通事故の発生をなくすことは 現実的には困難であり、危険の判断や操縦の技術は個人差が大きい。 そこで、搭乗者の能力によらず安全に移動することができるようになるには、 乗り物自体が環境に適応して移動する必要がある。
自動車においては、ITS(Intelligent Transport System)の技術により、 人と道路と自動車の間で情報通信をしながら交通の最適化を実現することで、 事故や渋滞を解消し、さらに省エネや環境との共存も図ることが可能となっている。 道路交通が抱える事故や渋滞、環境対策などの問題を、 最先端の情報通信や制御技術により解決するのがITSであり、様々な研究が行われている。 例えば、カーナビゲーションシステムを高度化することにより、 運転手が移動中に経路や移動時間等について最適な行動を選択することが可能となる。 また、各経路の渋滞情報、所要時間、交通規制情報および駐車場の満空情報等を、 ナビゲーションシステムや情報提供装置を利用して運転手へオンデマンドに提供することにより、 注意して走行すべき場所を事前に知ることができる。
カーナビゲーションシステムにも見られるように、情報端末の高性能化・小型化が進んだことにより、 いつでもどこでも必要な情報を手に入れることができるようになった。 現在、情報を手に入れるための手法としては、 移動中や外出先などで携帯型のコンピュータを利用するというモバイルコンピューティングが主流となっている。 また、モバイルコンピューティングの進化形として、 小型化・軽量化した情報端末を持ち歩くのではなく 常に身に付けて使用するウェアラブルコンピューティングという考え方も広がっており、 それに基づいた研究も数多く行われている。
しかし、いくら情報端末の高性能化・小型化が進み、情報を自由に獲得することができるようになっても、 人間の生活する実世界と獲得した情報の世界を密接に結びつけることには限界があると考えられる。 なぜなら、情報端末を持ち歩くだけでは、人間の物理的な行動と連動して情報処理を行っても、 その結果を直接人間の行動に対して反映させることができないからである。 いくら情報処理によって衝突の危険を感知することができ事前に人間に通知したとしても、 実際に移動を行うのは人間自身であり、人間が回避しなければ衝突してしまう。 つまり、情報を獲得した人自身がいかに情報をうまく活用できるかということが、 我々の生活をより快適なものにするために重要なものとなっている。
そこで筆者の所属する研究室では、人が情報端末を持ち歩くのではなく、情報と共に移動するという発想から、 情報処理と人間の物理的な移動を関連付ける方法を見出そうとしている。 これが、乗り物に情報処理機能や通信機能を持たせ、情報処理と人間の物理的な移動を連動させる、 搭乗型(マウンタブル)コンピューティングという考え方である。 この搭乗型コンピューティングのコンセプトのもとで、情報端末化した移動体として、 AT(Attentive Townvehicle)と呼ばれる個人用知的移動体を開発している。
ATは、搭乗者である人間や、AT自身を取り巻く環境に適応し、 個体間通信によって協調的に移動することのできる個人用の乗り物である。 ATはそれ自体が情報端末であるため、搭乗者である人間は常に必要な情報にアクセスすることができ、 また獲得した情報をすぐに搭乗者の行動へ反映させることができる。 また、搭乗者がATに搭乗して移動することにより、搭乗者の嗜好や行動履歴などを蓄積することが可能である。 そして、この情報を利用して搭乗者に適した速度で走行することや、搭乗者が興味を持ちそうなものを提示することが 可能となり、ATを搭乗者にとってより使いやすくカスタマイズすることができる。 つまり、ATは障害物等の状態を考慮しつつ個々の人間に適応した情報処理を行うことで、 搭乗者にとって最適な移動を実現することができる。
また、ATは自動車やバイクなどと異なり、屋内と屋外の両方で利用されることを想定している。 屋内には障害物などが多く、走行の幅が制限された狭い空間が多く存在するため、ATを利用して移動する際は細かい動きが必要となる。 そのため、いつでも適切な方向を向き、どの方向にもすぐに移動可能であることが望まれる。 そこで、ATの駆動にはメカナムホイールと呼ばれる複合車輪を用いている。 このホイールは、一つの車輪の車軸に対して45度傾けられた小型のローラーを 車輪の周囲に等間隔に並べて取り付けられた構造となっており、全方位への平行移動やその場回転を行うことが可能である。 この車輪を用いることで、AT は自動車などの一般的に移動に使用されている乗り物とは異なり、 搭乗者の任意の方向へ移動し、任意の向きに回転することが可能となった。 これにより、搭乗者の直感にあった移動を行うことができるが、 操作インタフェースや操縦方法も直感的でなければ搭乗者にとって真に有用な移動体とはいえない。 そこで、操縦にはゲーム等でも用いられるアナログスティックを採用し、 アナログスティックを傾けた方向へ実際のATを移動させるようにした。 また、各種設定と情報の閲覧にはタッチパネル付きの液晶ディスプレイを利用し、 搭乗者にとって直感的で分かりやすいものになるよう工夫した。 また、ATはレーザレンジセンサ、RFIDタグリーダ、および3軸角度センサを搭載しており、 障害物までの距離や現在位置、車体の回転角などの周囲の情報を取得し移動する際に利用することができる。 AT のシステム構成・操作方法については第2章で詳しく述べる。
これまで行われてきたATを用いた応用システムとして、走行履歴を含む体験記録を体験コンテンツとして蓄積し、 その情報を共有・再利用するシステムや、 赤外線タグを用いて実世界の対象を認識し、関連情報を提示するシステムなどが構築されてきた。 しかし、これらのシステムを利用する際は、 搭乗者はATの操縦とATから提示された情報の認識および操作を同時に行う必要がある。 搭乗者が操縦と情報に対する操作を同時に行うことは、 走行中に他の情報に気を取られてしまい危険である。 しかし、走行中に情報を取得することができなければ、 情報端末と物理的な移動が連動しているとはいえない。 そこで、屋内自動トランスポーテーション(Indoor Automatic Transportation) という仕組みが研究されてきた。 屋内自動トランスポーテーションは、 搭乗者がATに乗り目的地を指定するだけで、ATが地図情報から目的地と現在位置を把握し、 それらを結ぶ適切な経路を見つけ出し、迷わず安全に目的地まで移動することができる。 また、移動する障害物の移動ベクトルを考慮した障害物回避を行う手法も研究されている。 これは、移動障害物に対して移動速度ベクトルを算出することで進路を予測し、 進行を妨げないような回避経路を生成することで、回避動作の繰り返しの減少だけでなく、 搭乗者に不安感や圧迫感を与えない障害物回避を実現することができる。 自動で目的地まで辿り着くことができるようになったことで、移動中に操縦に集中するのではなく 周りの風景やATから提示された情報をじっくり見る事が可能となる。
以上のような自動走行を行うためには、地図情報を取得し目的地を明確に決める必要がある。 しかし、走行を行う際に地図情報を取得することが困難な場合や、 目的地を移動前に決められない場合も存在し、その時は自動走行を行うことができない。 また、自動走行では搭乗者が操作をすることなく目的地まで移動するため、 搭乗者の意図は移動中には反映されない。 自動走行が搭乗者を移動のための操作から解放したことで、 刻一刻と変化する周囲の状況や環境に合わせた情報提示等に応じて、 搭乗者が自らの意思で操縦を行う欲求が生じる。 その場合は、自動走行を利用せず、アナログスティックを使用して搭乗者自身が操縦して移動するマニュアル走行を行う。
マニュアル走行を行う際は、搭乗者がアナログスティックを移動したい方向へ傾ける事により走行を行う。 傾けた方向と傾きの度合いから、移動する方向と移動速度が決まるため、 搭乗者の意図する方向に走行を行うことができる。 また、ボタンを押しながらアナログスティックを倒すことによってその場回転を行うことも可能である。
しかし、搭乗者が自由に移動を行うと、搭乗者の認識や目測の誤りによって障害物と衝突する可能性がある。 屋内は屋外と比べて障害物等によって走行の幅が制限された空間が多い。 このような空間では障害物と衝突する可能性が高いだけでなく、 たとえ障害物と衝突することなく移動することができたとしても、複雑で細かい操作を必要とするため、 安全な走行を行うには自動走行が理想的である。
そこで本論文では、搭乗者の指定する方向へ移動すると衝突する危険がある場合に、 レーザレンジセンサで取得した全方位の障害物までの距離情報と、 搭乗者が指定した速度と方向を元に、 安全に走行できる速度と障害物に接触することなく移動できる方向を決定することで、 簡単な操作で障害物に衝突することなく移動を行う手法を提案する。 搭乗者の指定方向に障害物を考慮するエリアを設け、 そのエリア内に存在する障害物までの距離から減速させる割合を決定することで安全な速度を保つ。 また、ATが走行可能な空間を検出し、その空間へ移動するために必要な方向を決定する。
また、障害物によって走行の幅を制限された空間をマニュアル走行する場合、 搭乗者は障害物との距離を確認して微調整をしながら走行することになる。 しかし、本研究では移動方向の微調整をシステムが行うことによって、 搭乗者は障害物との距離をあまり気にしなくても衝突することなく走行することができる。 これにより、搭乗者が細かい障害物を意識することなく進みたい方向を指定するだけで移動することが可能となる。
しかし、ただ障害物を避けるように移動方向を調節して走行を続けると、 本来走っていたコースから大きく逸れてしまう場合や、 廊下等で壁沿いを走行していたのに障害物を避けることで廊下の中心へ移動し、 そのまま移動を続けることで歩行者などの移動の邪魔となる場合がある。 そこで、移動方向を調節した後に、障害物を回避する前に走行していたコースへ戻るという機能を追加した。 これは、移動方向を調節する際に移動方向と指定方向の差分を記憶しておき、 回避後に再び移動方向を調節して、元に戻るという機能である。 これによって、障害物を回避する前に走行していたコースへ戻ることができ、障害物を回避した後で走るコースが大きく逸れてしまうことを防ぐことができる。
また、搭乗者は必要に応じてATを乗り降りする必要があるが、 屋内には移動体を長時間停止させる場所がないことも多く、 人の邪魔にならないような場所で駐機させる必要がある。 そこで、あらかじめ駐機させたい方向を指定したのち、 搭乗者がATから降りると自動で駐機する場所へ移動する手法を提案する。 搭乗者の指定した方向にある隅や袋小路を見つけ、その方向へ移動を行うことにより、 駐機可能な場所へ移動を行うことができる。
次章以降の本論文の構成は以下のようになっている。 まず第2章で個人用知的移動体のコンセプトおよび構成と機能について述べる。 次に第3章で狭空間で安全に走行するための支援の方法、 および搭乗者が降りるときにATを人の邪魔にならない場所に駐機させるための方法について述べる。 第4章では狭空間での安全走行支援の有効性を検証するための実験と考察について述べる。 第5章で関連研究を紹介し、第6章でまとめと今後の課題について述べる。
2 個人用知的移動体AT
AT(Attentive Townvehicle)は、搭乗者である人間や、AT自身を取り巻く環境に適応して移動する個人用の乗り物である。本章では、ATのコンセプトおよび構成と機能について述べる。
2.1 ATのコンセプト
搭乗型コンピューティングのコンセプトは、いつでもどこでも情報処理を支援するだけでなく、移動や運搬などの物理的行動も同時に支援しようというものである。我々はこの搭乗型コンピューティングのコンセプトのもと、情報端末化した移動体として、AT(Attentive Townvehicle)を開発している。
ATは状況認識機能を持つ知的な移動体であり、人間はATに乗り込むことで、情報システムと一体化し、情報環境と物理環境を適切に連結することができる。また、複数のATは協調的に動作することができ、安全に走行できるだけでなく、人間のコミュニティ活動や社会ネットワーク構築も支援することができる。
図に示すように、ATを用いた研究領域は多岐に渡っている。我々はATをより知的な移動体にするために、ATと「環境」「人間」「他のAT」という各要素間にある3つのインタラクションに「ATの個体としての自律性」を加えた4つの軸をもとに研究を進めている。図に示した、4つの軸をこれまでに行われた研究とともに記述する。

図2.1: ATに関わる研究分野
-
ATと環境とのインタラクション
ここでいう環境とは、物理的環境(実世界)と情報的環境(情報世界)の2つの意味を持つ。 物理的環境とは、ATがセンサ類やモータにより認識あるいは作用することができる現実世界の対象や状態を指し、人間における知覚や運動の対象に相当する。 一方、情報的環境とはATがアクセスできるコンテンツや情報サービスの集合を指す。 これに関して行われた研究に、実世界対象物の認識や場所に連動した情報コンテンツの提示などがある。
-
ATと人間とのインタラクション
移動体がユーザの特性を把握し、移動体を利用すればするほどユーザに適応していく 個人適応という研究課題がある。また、状況に応じた操作インタフェースを提供することも考えられる。 例えば、人間の身体性を利用したより直感的な操縦インタフェースや、非搭乗時の遠隔操作等である。 これまでには、非搭乗時に自動的に人間を追尾させる研究も行われている。
-
AT間(移動体間)のインタラクション
移動体間通信を用いることで、AT同士は協調動作を行うことができる。 これまでに、接近中のAT同士が互いに通信して衝突回避を行う研究や 先頭の有人のATを無人のATが追尾する連携協調動作の研究が行われてきた。 また、アドホックネットワークの仕組みを用いて周囲のATとコミュニケーションを行うことが可能になるため、 ATを用いたコミュニケーション支援システムやAT搭乗時の体験を共有・再利用するシステムが構築された。
-
ATの個体としての自律性
人間の認知的能力を補うためには、 移動体の感覚機能を強化し自律的動作を実現することが求められる。 これまでに、自動的に移動障害物を回避する研究が行われている。
以上のようにATは自身に搭載されたセンサ類や、AT間・AT-サーバ間の通信によって3種類のインタラクションとAT自身の自律性を実現している。また、これらのインタラクションを通して獲得した情報を利用して、人間や環境への適応を可能にしている。
2.2 オムニムーバー
本研究で開発したATの外観を図に示す。詳細については2.3.1節で述べる。
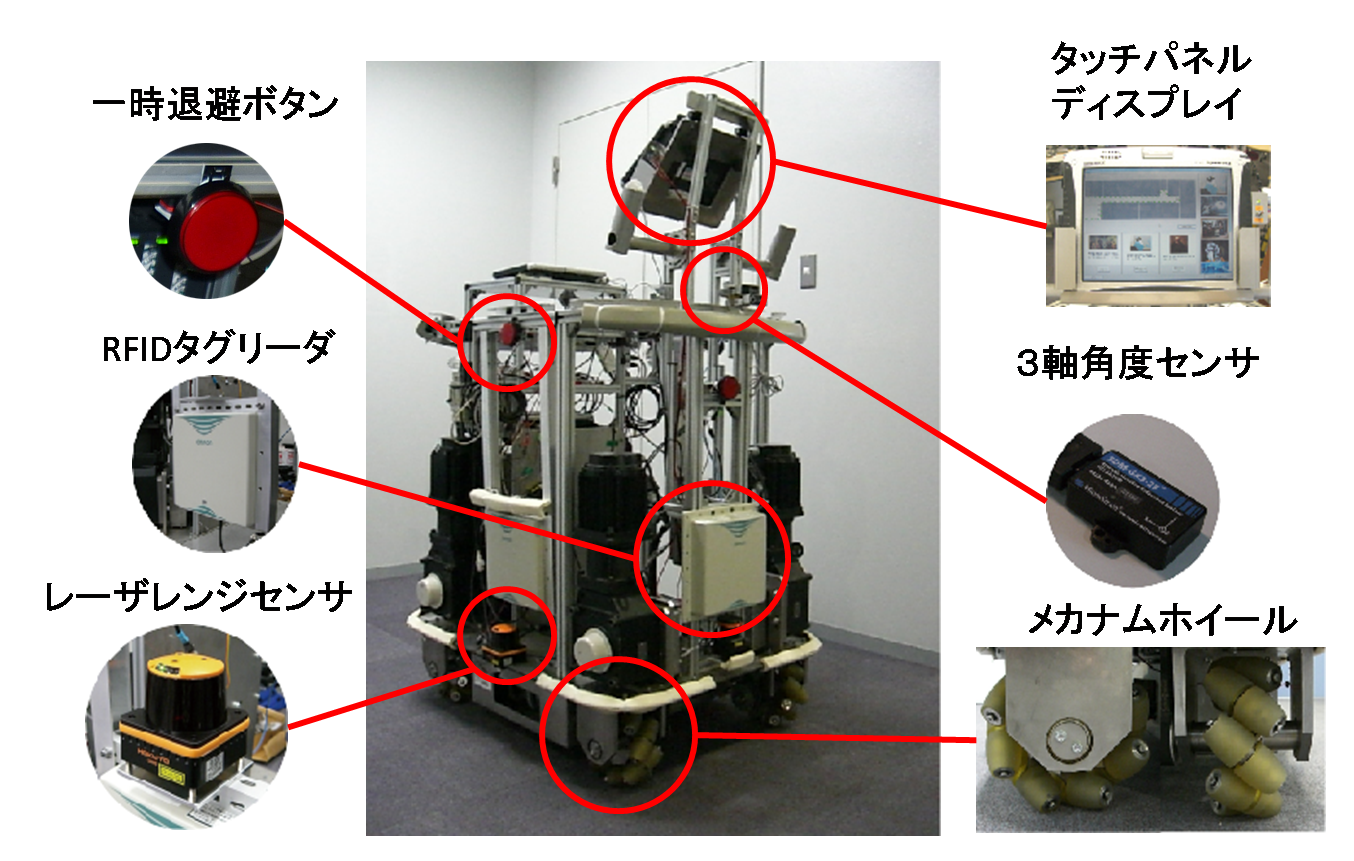
図2.2: 個人用知的移動体AT
AT の特徴の一つは、全方位に平行移動ができることである。我々はそのような移動体を「オムニムーバー(OmniMover)」と呼んでいる。オムニムーバーは、アメリカの個人用移動体セグウェイのようにその場回転をして任意の方位を向いてから走行するものでなく、静止状態であればどの方位にもすぐに動けるものである。ただし、既に動いている状態で任意の方向に動くためには慣性を考慮しなければならない。また、乗っている人間への加速度の影響も考慮しなければならないため、動いている最中は搭乗者が動きたいと思っても、その方向へすぐに移動できるわけではない。
しかし、全方位に動くことが可能であるということは、これまでの乗り物とは違った動き方ができるということである。それは、例えば障害物や人などの避け方に現れてくる。これまでの乗り物は、止まっている状態から真横に動くことができないため、障害物や人間が乗り物の間近まで接近してしまうと回避しきれず衝突してしまう。しかし、全方位に動くことが可能であれば、障害物や人間が乗り物の間近まで接近していたとしても、障害物と衝突することなく安全な方向へ移動することが可能である。
本研究では全方位移動を実現するために、フォークリフト等にも使用されているメカナムホイールという機構を採用した。以下では、メカナムホイールと、それを用いて実現した全方位移動のメカニズムについて述べる。
2.2.1 メカナムホイール
本研究で用いるメカナムホイールの外観を図に示す。メカナムホイールは一つのホイールに、車軸に対して45 度傾けられた小さなローラーを車輪の周囲に等間隔に並べて取り付けられた構造となっている車輪である。
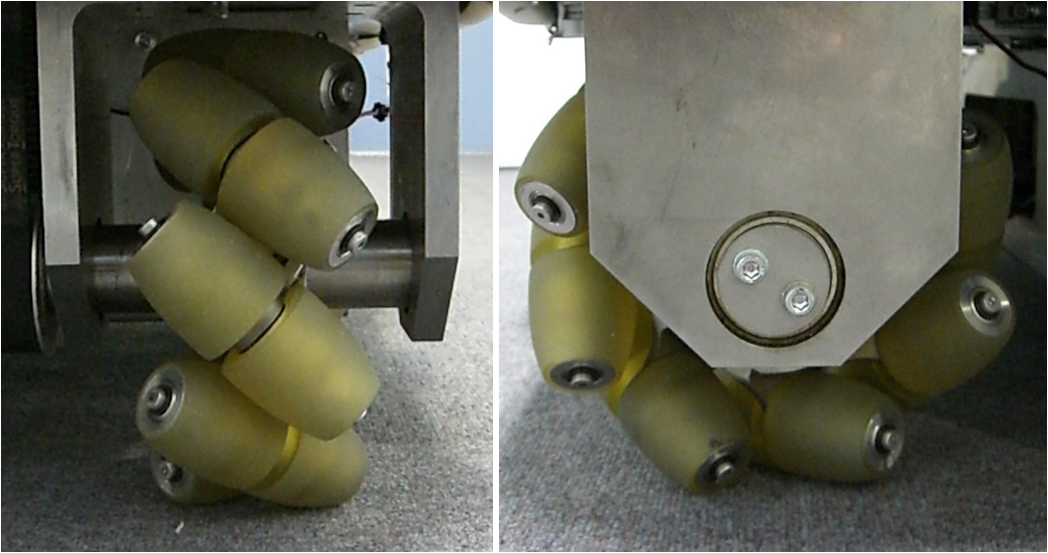
図2.3: メカナムホイール
メカナムホイールは、車軸のついている大きい車輪はモータによって制御することができるが、周囲のローラーには動力が存在せず、回転するだけになっている。メカナムホイールは正回転する際、ホイール自体はAT が前方向に移動するように回転するが、車軸に対して45 度傾けられた方向に配置されたローラーにより、ローラー軸方向に対して法線方向の推進力が生じない。この結果、メカナムホイールは、ローラー軸と平行の方向に推進力が発生する。したがって、4 輪の進行方向の組み合わせによって全方向移動が可能となる。
しかし、メカナムホイールではローラーを回転させて移動を行うため、メカナムホイールに働く力を正確に解析することは困難である。そのため、モータに与えたホイールに対する出力値から実際の移動距離と方向を把握することは難しい。また、モータの出力が全て推進力に変換されるわけではないため、バッテリーの消費量に比べて走行距離が短いという問題も同時に発生する。
また、メカナムホイールには弾力性がないため、走行している地面の凹凸や移動方向によっては、その振動が搭乗者に直接伝わってしまう。このような点はこれから改善していかなければならない。
2.2.2 全方位移動のメカニズム
全方位移動およびその場回転は、図のように配置された4 個のメカナムホイールを個別に制御することによって実現している。メカナムホイールとベルトでつながれた高トルクのサーボモータはそれぞれにおいて任意の速度制御が可能であり、またトルクを0 にすることで空転させることができる。
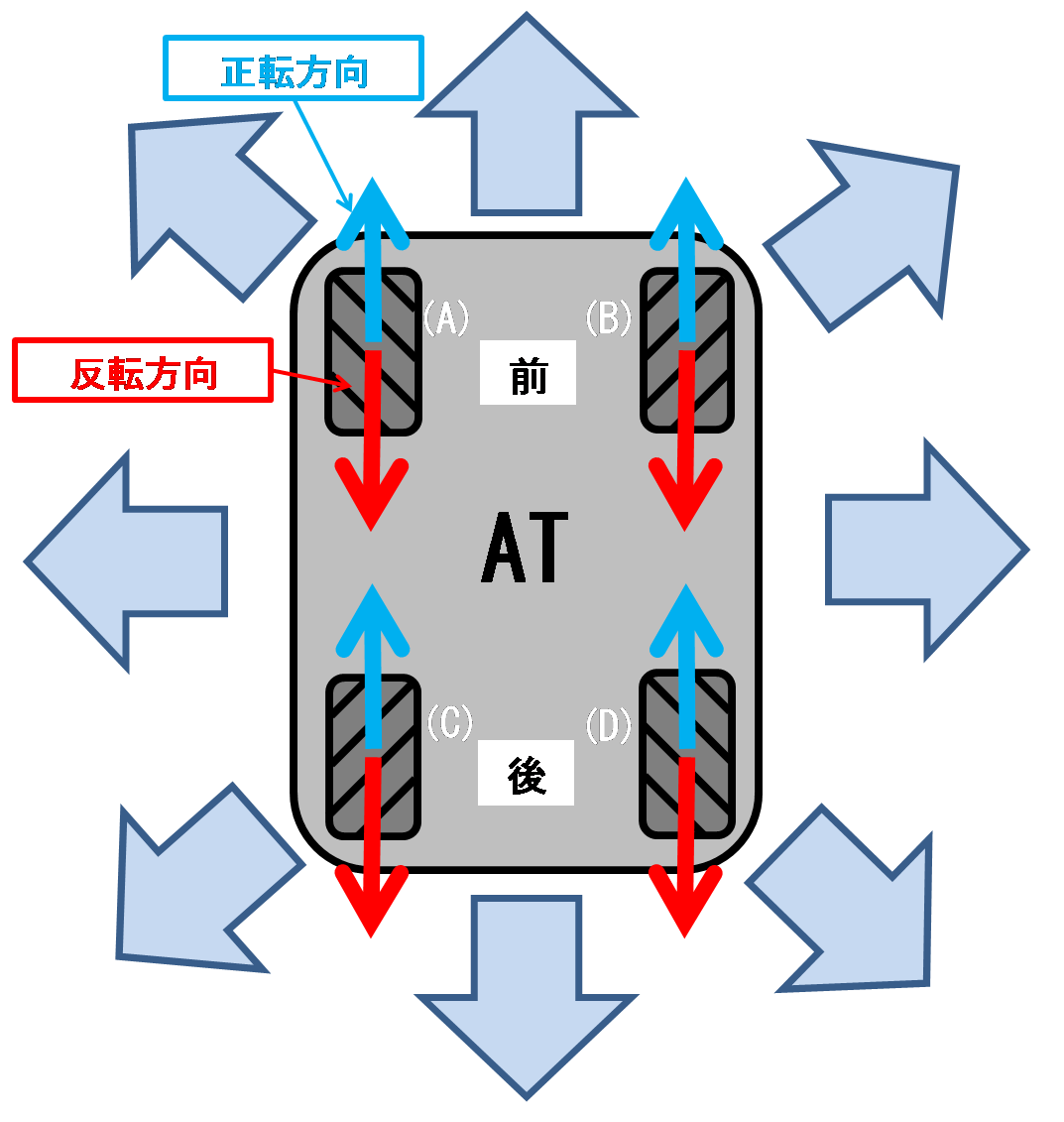
図2.4: 全方位移動のメカニズム
前後左右に動かす時は、4 輪の回転速度を等速にして、それぞれの回転方向(正転か反転) を動く方向に合わせて調節する。例えば右方向へ動かす時は、図の(A) と(D) を正転方向、(B) と(C) を反転方向に動かすことで移動させることができる。
車体から45 度の方向へ動かす時は、右斜め前に移動することを例にとると、(A)と(D) のタイヤを正転方向に動かし、(B) と(C) のタイヤを空転させることによって、移動させることができる。
それ以外の任意の方向へ移動するときは、4 輪のタイヤの回転数を適度に調節することによって実現できる。なお、その場回転は、(A) と(C) を正転方向(あるいは反転方向)、(B) と(D) のタイヤを反転方向(あるいは正転方向) へ回転させることで実現できる。
上記の方法により、駆動輪に4 つのメカナムホイールを用いたAT は、本体の向きを変えずに任意の方向へ移動できるため、図のように障害物回避をスムーズに行うことができる。これまでに実用化されている通常の移動体には不可能な、静止状態から真横に移動する動作が可能になり、AT は障害物や人間が接近している場合でも衝突することなく安全な回避を行うことができる。
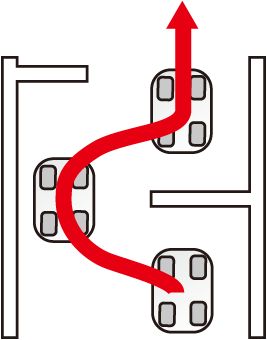
図2.5: 全方位移動による障害物回避
2.3 システム構成
前節ではAT の駆動系について詳しく説明したが、ここではAT 全体の構成について説明する。
2.3.1 ハードウェアおよびソフトウェア
AT の車体はアルミ材で構成されており、AT は屋外と屋内の両方で利用できるように、車体の幅を屋内の扉やエレベータの入り口を通り抜けることが可能な大きさに抑えられている。人間は立った状態でAT に搭乗し、手動で操縦する場合は、手元にあるアナログスティックを用いてコントロールする。また、各種設定にはタッチパネルディスプレイを用いており、AT のユーザインタフェースはわかりやすい直感的なものとなっている。操縦インタフェースについては2.4 節で説明する。
また、AT は環境の情報を取得しながら自動走行を行う。そのため、自身の位置や周囲の障害物などの情報をすべて環境から取得しなければならない。環境から情報を取得するために以下のデバイスを用いており、移動に伴う環境の変化に応じて暗黙的に情報を獲得することができる。
-
レーザレンジセンサ
壁沿い走行や障害物回避など幅広い状況で全方位にある障害物との距離を測定するのに利用する。レーザレンジセンサは床面から一定の高さの平面上に扇状の距離情報を最大30m、角度240 度の範囲で得ることができる1。このレーザレンジセンサをAT の前後左右に各1 台ずつ設置し、後述するレンジセンササーバPC で4 台からの距離情報を統合させることによって360 度全方位の距離情報を取得することができる。
-
RFID タグリーダ
地図との照合による自身の現在位置の確認および修正と、目的地の認識に利用する。RFID タグリーダは無電源非接触のIC タグであるRFID(RadioFrequency Identication) タグを読み取ることができる。RFID タグリーダもAT の前後左右に各1 台ずつ設置した。4 台のタグリーダはそれぞれ固有のID を持っており、どのリーダがどのID を持つタグを読み取ったかを判別することが可能であるため、車体の向きも同時に判別することができる。
-
3 軸角度センサ
車体の傾斜角や回転角を知るのに利用する。
これらのセンサを用いることで、移動に伴う環境の変化に応じて暗黙的に情報を獲得することができる。また、一時退避ボタンをAT の前後左右の4 か所に設置した。詳細は3 章で述べる。
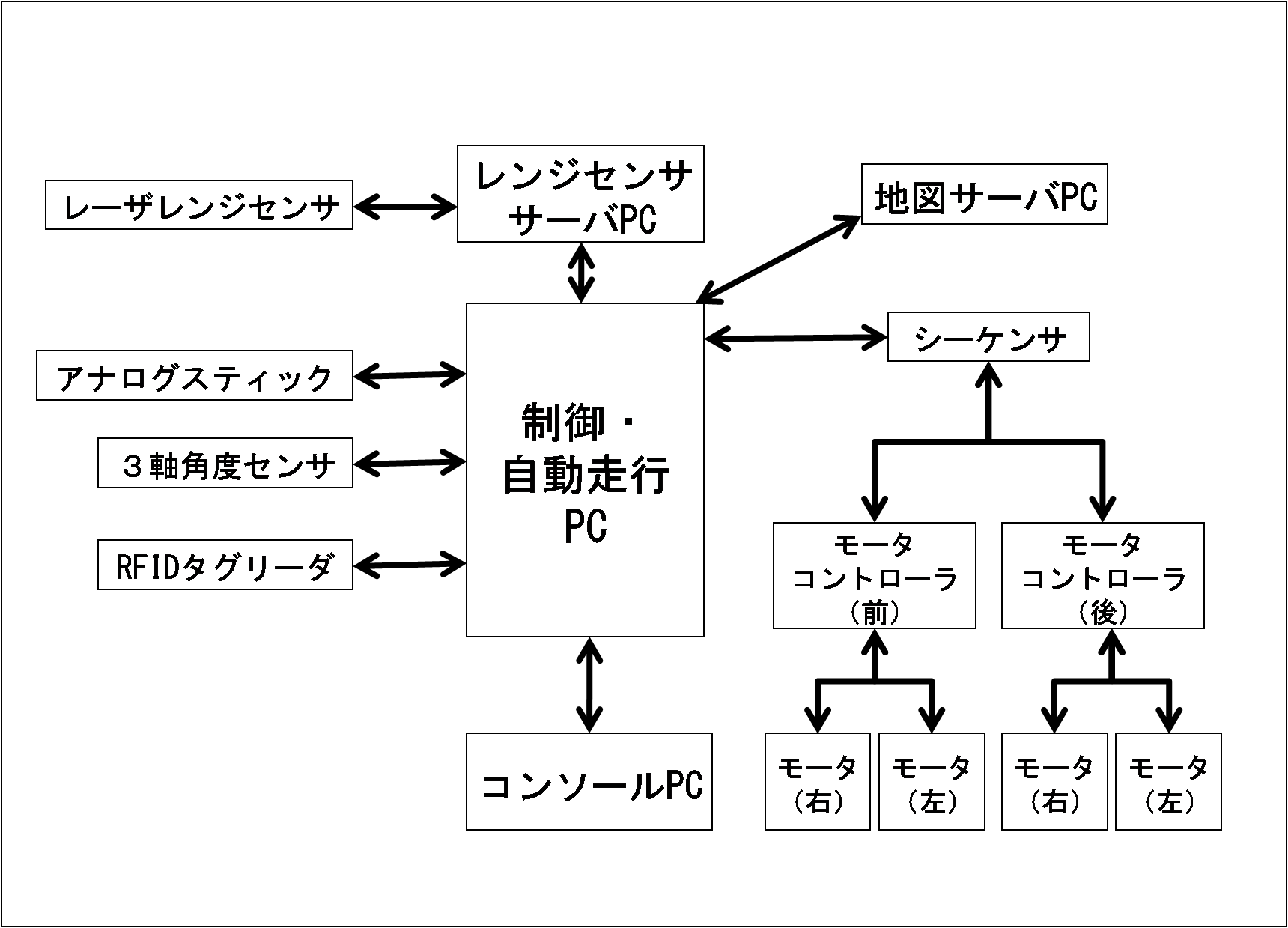
図2.6: システム構成
AT には4 台のPC が使用されており、モータの制御、センサデバイスの制御、地図に基づく経路・動作の生成などを行っている。AT に搭載されているPC は、制御・自動走行PC、レンジセンササーバPC、コンソールPC で、これらのPC は互いに有線で接続されており、またモータ制御PC とシーケンサも有線によって接続されている。地図サーバは環境に設置されていることを想定しているため、地図サーバPC と制御・自動走行PC は無線によって接続されている。それぞれのPCの主な役割は以下の通りである。
-
制御・自動走行PC
モータに繋がるシーケンサなどの制御系デバイスが接続されているPC であり、モータコントロールサーバと呼ばれるモジュールが稼働している。ATには、4個のメカナムホイールそれぞれとつながっているモータを個別に制御するためのデバイスが装備されている。このPC で、進行方向や速度の入力を元に、各モータの速度パラメータを求め、その値をシーケンサに送る。シーケンサはモータコントローラを通して、各モータのトルク調節を行う。モータコントローラはATに2つ装備されており、一方は前方の左右2つの、もう一方は後方の左右2つのメカナムホイール用モータの出力トルクを制御している。また、各PC からのモータ制御の命令はこのPC を介して行われる。他にも、RFID タグのID を保持するRFID サーバも組み込まれており、走行中に読んだタグを、前後左右それぞれ10 個まで保持することができる。読み取ったタグの情報は、一定時間が経過すると破棄される。これは、最後にタグを読み取ってから時間がたってしまうと、そのタグは位置情報として役に立たないものになるためである。
また、自動走行のタスクを実行するプログラムも稼動しており、自動走行のタスクを実行する命令が発行されると、モータコントロールサーバがモータに命令を送り自動走行を行う。
-
レンジセンササーバPC
レンジセンササーバと呼ばれるモジュールが稼動しているPC である。レンジセンササーバは4 台のレーザレンジセンサを使用してAT の周囲の物体までの距離を常に測定しており、受信した距離情報をAT 中心の極座標に変換している。この値を利用して自動走行や、衝突回避を行っている。
-
搭乗者の正面に置かれたPC であり、タッチパネルディスプレイが備えられている。ディスプレイには操作用コンソールが表示され、搭乗者はコンソール画面から目的地を設定することができる。
コンソールPC
-
地図サーバPC
建物内の地図、RFID タグのID とその位置、およびRFID 間の距離の情報を格納したデータベースを保持しているPC である。AT からの現在位置・目的地情報と情報取得要求に応じて、現在位置付近の地図や、現在位置から目的地までの経路と動作の生成を行い、生成された経路と動作をAT に送信する。さらに、地図サーバは通信可能な範囲に存在するAT の位置を常に把握している。
また、AT は移動体であるため、このように多くのPC やセンサ・デバイスを装備しても、搭乗者である人間に負担をかけることはない。むしろ、できるだけ多くのセンサから獲得した情報に基づいて実世界の状況を認識し、物理的な行動に反映することで、人間の行動をより適切に支援することを目指している。
2.3.2 ネットワーク
前節で、地図サーバは環境側に設置されたサーバで、AT と無線で通信し、より詳細な環境情報を取得していることについて触れた。ここでは、AT の特徴の1つであるネットワークの基本システムについて述べる。AT におけるネットワーク構成図を図に示す。
図2.7: AT におけるネットワーク構成
AT を取り巻くネットワークでは、周囲の情報を配信するサーバの存在が前提となっている。統括サーバは、ある特定の地域を統括するような形での存在を想定しており、AT 間通信の基盤を提供するとともに、サーバクライアント型のアプリケーションを提供する。統括サーバ以外には、例えば美術館や病院のような施設単位で、情報を配信するサーバが複数存在している。
搭乗者がATに乗り、ログインを行うと、統括サーバとのコネクションが確立され、情報サービスを受けることが可能となる。統括サーバは、コネクションを確立しているAT や、施設サーバの情報を収集し、AT が屋内情報へアクセスする際などに、AT の位置情報などを考慮して情報を提供する。この仕組みにより、近くにいるATの情報や施設の情報を容易に取得することが可能である。もちろん、他のAT に対してメッセージを送信したり、複数のAT に対して情報をブロードキャストすることもできるようになっている。
また、AT は個体間通信によってAT 同士や搭乗者同士の情報交換を行うことができる。例えば、AT 同士の連携動作に関する制御情報や搭乗者間におけるメッセージのやりとりなどである。個体間通信では、目的や通信対象との距離に応じて、サーバを介した無線LAN 通信、無線アドホック通信、および赤外線通信が自動的に切り替わり、状況に応じて使い分けられる。遠隔にあるATと情報交換を行う場合は、サーバを介した通信が適している。それに対して、AT 同士の衝突回避などの即時性を求められる場面では、暗黙のうちにAT間のアドホック通信に切り替わることで対応する。
2.4 操縦インタフェース
ATの操縦は、手元のアナログスティックを倒したりボタンを押したりすることで行う。ATの稼働状態を監視するためのコンソール画面とコントローラを図に示す。
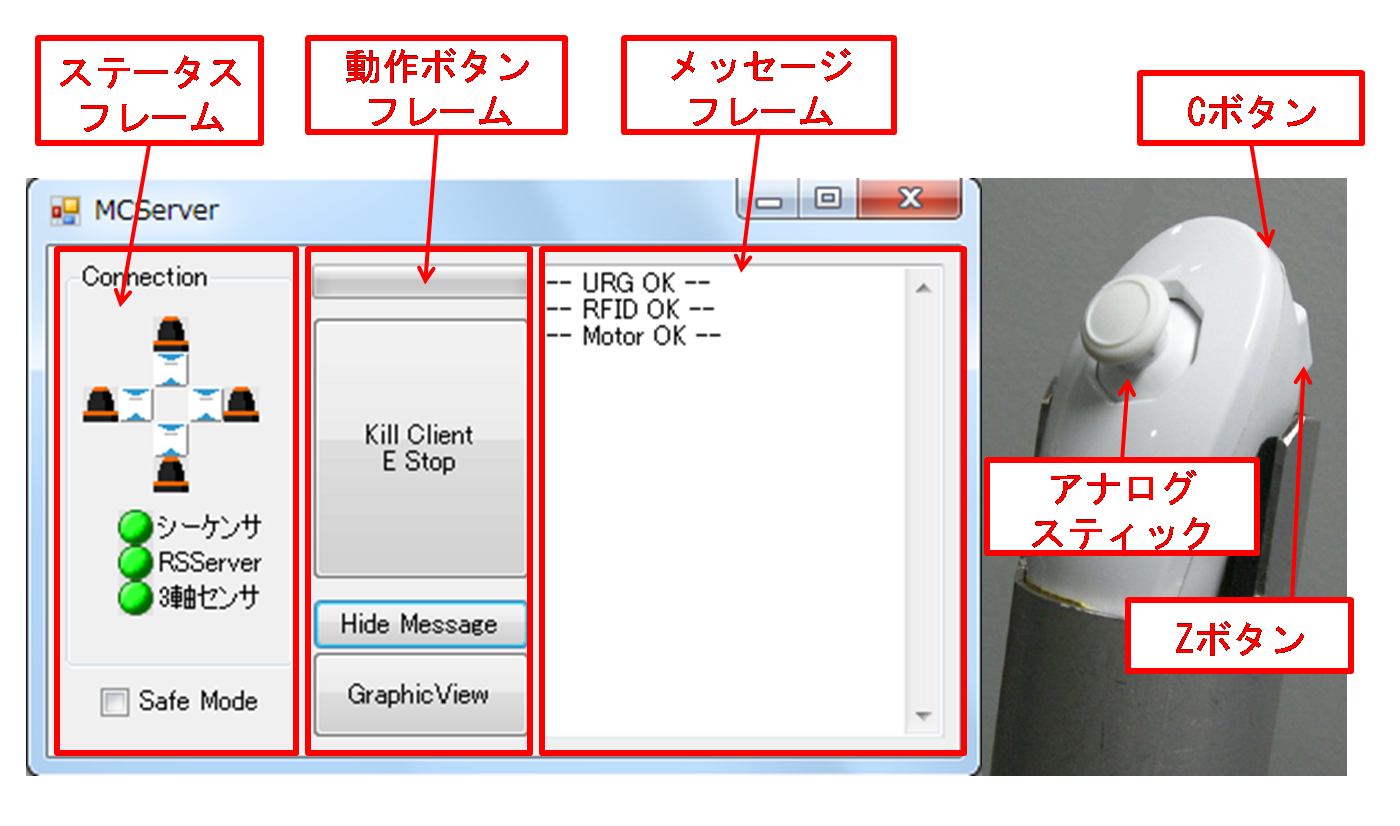
図2.8: コンソール画面とコントローラ
図の左側は、AT のタッチパネルディスプレイに表示されるAT の稼働状態を監視するコンソール画面である。AT に搭載された各PC との通信状況や、各センサとの接続状態が表示されている。コンソール画面はステータスフレーム、動作ボタンフレーム、およびメッセージフレームの3 つのフレームで構成されている。それぞれのフレームの役割を以下に示す。
-
ステータスフレーム
各センサやシーケンサとの接続状態が表示されている。RFID タグリーダやレーザレンジセンサは4 方向それぞれに設置されているため、センサやタグリーダと接続されている箇所が分かるようになっており、接続状態を視覚的に確認することができる。機器の故障や接触不良などの異常を即座に発見できるため、機器のトラブルによる誤作動を防止することができる。
-
動作ボタンフレーム
緊急停止、メッセージフレームの表示/非表示、およびセンサの詳細情報の表示を行うためのボタンがある。センサの詳細情報のボタンを押すと、図に示す、レーザレンジセンサが取得した360 度の距離情報、RFID タグリーダが読み取ったタグの番号、および3 軸角度センサで測定した車体の回転角の情報が視覚的に分かりやすく表示される。
-
メッセージフレーム
センサやPCとの接続や、モードの切り替えの際にメッセージが表示される。
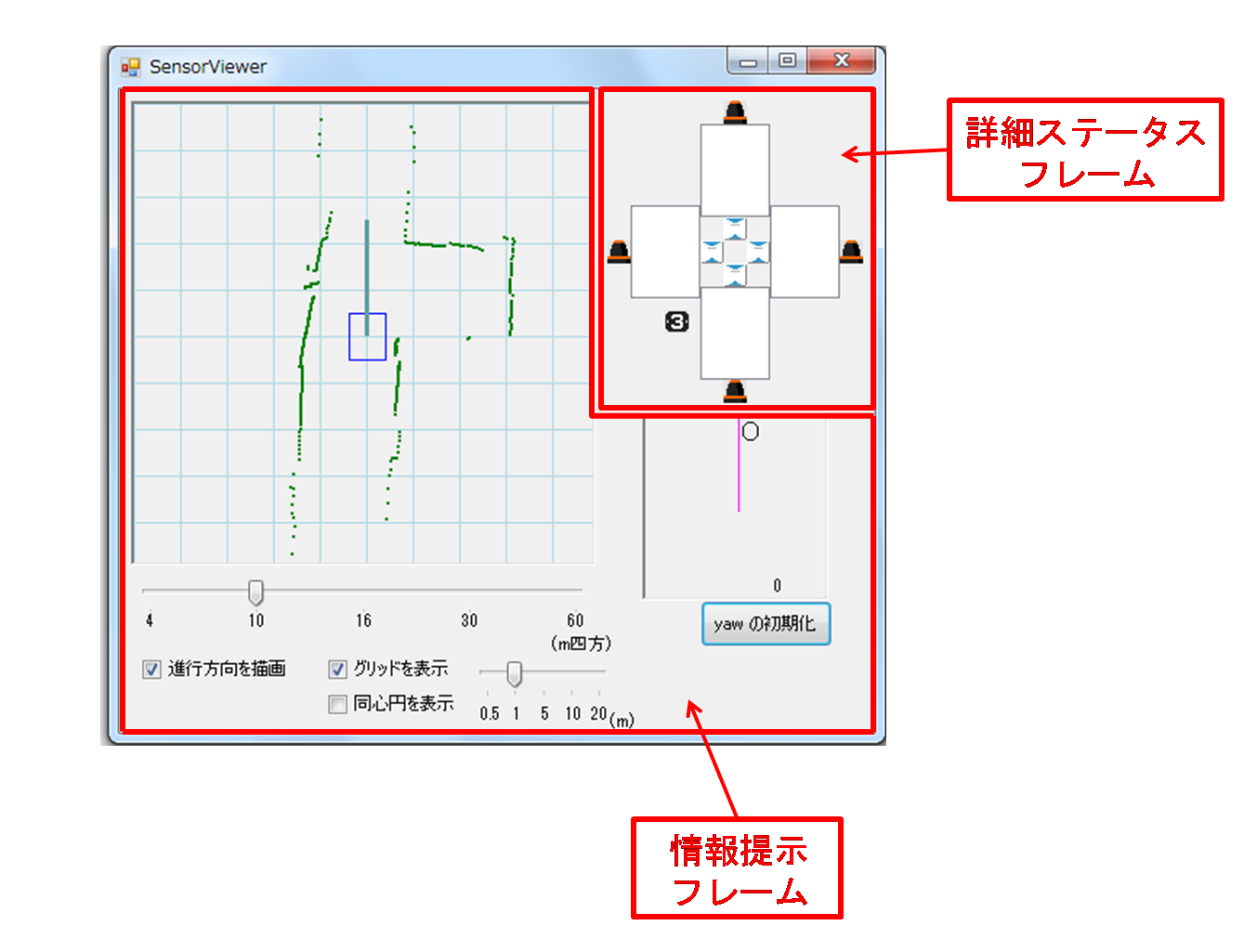
図2.9: 各センサの詳細情報
マニュアル走行には、図右側のコントローラを使用する。コントローラは制御・自動走行PC とUSB ケーブルで接続されており、AT のハンドル部に付属のポケットに格納したまま使用することも、手にとって使用することも可能である。コントローラには、アナログスティック、C ボタン、およびZ ボタンが備わっており、各々には以下のような機能を有する。
-
倒す角度と傾きの度合いによってAT が移動する方向と速さを決めることができる。また、スティックを離すとAT は停止する。
アナログスティック
-
C ボタン
押しながらアナログスティックを倒すと、その場回転を行うことができる。
-
押しながらアナログスティックを倒すと、駐機モードへ切り替えることができる。駐機モードについては3 章で詳しく述べる。
Z ボタン
2.5 走行モード
AT に搭乗する移動には、自動走行モードとマニュアル走行モードの2 つのモードが存在する。以下で各モードにおける具体的な移動方法について述べる。
2.5.1 自動走行
AT は、地図情報を利用して出発地から目的地までの最短移動経路を計算し、それを基に動作を行うことで自動的に移動を行うことができる。
自動走行によって目的地に到達するためには自身の位置を知らなければならない。そこで、AT の位置と地図との対応付けにRFID タグを用いている。環境側に設置されたRFID タグをATが読み取ると、地図上に記録されているRFID の位置情報から現在位置を知ることができる。また、AT に備え付けられている前後左右のRFID リーダのうち、どのリーダで読み取ったかによって現在AT がどちらを向いているかということも知ることができる。
AT が屋内で自動走行を行う時には、壁沿いを走行する。これは、RFID タグが壁に設置されていることと、壁を手掛かりとすることでAT の現在位置をより正確に絞り込むことができることの2 つの理由による。例えば、壁から離れた状態で、壁に設置されているRFID タグを読むと、どのタグリーダでタグを読んだかという情報に基づくおおよその向きしか知ることができない。つまり、AT が壁側へ傾いて進もうとしているのか、壁とは反対方向へ進もうとしているのかなどといった細かい情報を得ることはできない。しかし、壁沿いを走行しているならば、壁を頼りにAT を壁と平行にすることができるため、方向を一意に決めることができる。
AT による自動走行は次の手順で行う。まずはじめに、搭乗者はAT に搭乗し、コンソール画面を用いて目的地を設定する。目的地を設定し終わると、AT は自身の位置を把握する。具体的には、レーザレンジセンサを用いて、壁までの距離が最も短い方向を見つけそちらに接近する。その後AT が壁に接近したら、RFID タグが見つかるまで壁沿い走行する。タグを見つけたらその時点で地図サーバに問い合わせ、タグの地図上の位置から自身がいる場所を把握する。
その後、自身がいる場所から壁沿い走行の時間ができるだけ長くなるように最短経路を計算する。目的地までは、壁沿い走行や交差点の右左折・直進、突き当りでの右左折などの動作を行いながら移動する。また、RFID タグを用いて適宜自身の位置を把握し、コースから外れていないかの確認も行う。目的地に到着すると、到着したことを搭乗者に伝え、AT の自動走行を終了する。
本研究で用いるAT には、2.3.1 節で述べたように、全方位の障害物までの距離を測定するセンサが搭載されている。そのため、AT は障害物を検知すると自ら回避するように動作することができる。また、無線LAN と赤外線通信を用いた移動体間通信によって複数の移動体が衝突しないように協調的に動作させることもできる。これらの仕組みによって、AT が障害物に衝突することなく、安全性を十分に考慮した走行が可能である。
2.5.2 マニュアル走行
マニュアル走行を行う場合は、コントローラを使用する。アナログスティックの操作を行わない状態がニュートラルポジションであり、ニュートラルポジションにある間は停止している。アナログスティックを任意の方向へ傾けると、ニュートラルポジションを中心とした直交座標値を取得する。この座標を極座標に変換し、角度と距離を計算する。ATの角度指定は、ATの前方を0 度、左側をマイナス、右側をプラスとした-180 度?+180 度の範囲で行う。また、座標距離から移動速度を計算する。これにより、搭乗者の指定した方向に指定した速度で移動することができる。
AT をその場回転させるには、C ボタンを押しながらアナログスティックを左右に傾ける。右に傾けると右回転、左に傾けると左回転を行う。また、傾ける度合いにより回転を行う速さも同時に指定する。
しかし、自由度が高い移動ができるということは、衝突などの危険も増加しているということである。そのため、衝突する危険がある場合に進行方向や速度を調節する補助走行を実現した。また、一時的にAT から降りる際にAT を周りの人の邪魔にならない場所に駐機しておくための仕組みを実現した。これらについては第3 章で詳しく述べる。
3 狭空間での安全走行支援
前章では、全方位移動可能な個人用知的移動体AT について述べた。AT に搭乗して移動する際に、特に屋内では、物が乱雑に置いてある状態が多く、狭い場所が多く存在するため、狭い場所でも安全に移動する必要がある。そこで本章では、屋内での移動をより安全に行うための支援について述べる。
3.1 狭空間
本研究で想定する狭空間とは、図のように屋内においてAT の大きさと同じ程度の物理的な空間が確保されているが、物体によって走行の幅を狭められた場所である。また、物体は移動しないものであるとする。
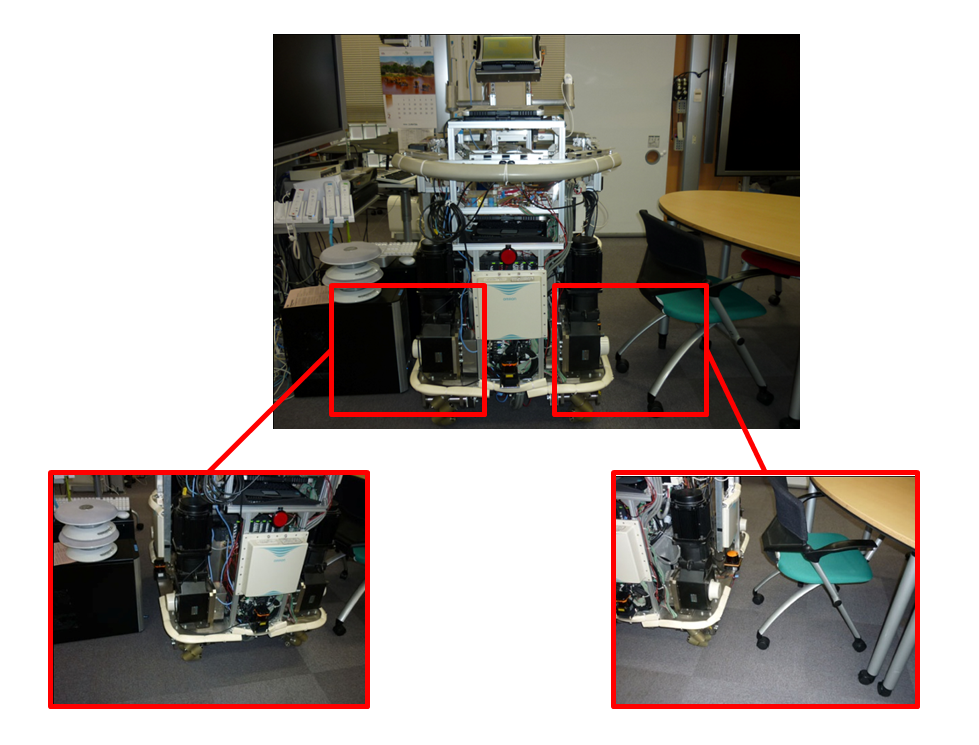
図3.1: 狭空間の例
3.2 安全走行支援
前章の2.5.2 節で述べたように、AT はアナログスティックを使用して任意の方向へ移動することができる。
移動体の幅と走行できる空間の幅が近い狭空間の場合は、操作のミスがほとんど許されず、衝突する危険が非常に高い。自動車などの乗り物では、少々左右に傾いたとしてもすぐに衝突するわけではないが、AT のように全方位移動が可能な場合、少し操作を誤ってしまっただけでも障害物と衝突する危険が高くなる。また、屋内では狭空間が多いため、衝突する可能性が高いだけでなく、衝突することなく通り抜けるには、常に周囲の障害物に気を配りながら移動することが求められる。そのため、走行を行うには複雑で細かい操作をしなければならない。そこで、本研究では狭空間における搭乗者の操縦を支援する。
AT に搭乗して移動を行うための支援として、補助走行モードを導入した。補助走行モードでは、搭乗者の指定した速度と方向を元に、安全に走行できる速度と、障害物に接触することなく移動することができる方向を計算し、AT の走行に反映させることで、簡単な操作で障害物に衝突することなく走行できる。搭乗者の指定する方向に障害物を考慮するエリアを設け、そのエリア内に存在する障害物までの距離から減速させる割合を決定する。また、AT が走行可能な空間を発見し、その空間へ移動するために必要な角度を移動方向として決定する。
また、AT に搭乗して移動している場合でも、ショッピングモールで個々の店に入る際など、必要に応じてATを乗り降りする必要がある。ATから降りる場合は、本来ならば全ての屋内に自動車の駐車場のように駐機場を設定しておき、そこに停止させる必要があるが、全ての建物内に駐機場を設定するのは、既存の建物においては困難であり、屋内において常に駐機場があるとは考えにくい。そのため、屋内の適当な場所に停止させなければならない。ドアの正面や道の真ん中など、搭乗者の降りたい場所でATを止めた場合、周りの歩行者などの移動の邪魔になるため、AT を袋小路や、建物の隅など周りの人の邪魔にならない場所に駐機しておく必要がある。袋小路や隅にはAT の幅と同程度の場所も存在するが、搭乗者が乗っている場合は、降りることも考慮した上で駐機する場所を決めなければならない。
そこで、本研究では駐機モードという走行モードを新たに導入した。駐機モードでは、駐機したい場所の近くまで移動したら、搭乗者は駐機モードを設定してAT から降りる。これは、具体的な位置を設定するのではなく、アナログスティックを使用して、搭乗者自身の判断で人の邪魔にならず、駐機ができそうな場所の存在する方向を指定することで設定する。搭乗者が降りると、AT はセンサなどの情報を頼りに搭乗者が指定した方向へ移動しながら、袋小路や隅などを見つける。AT が袋小路や隅などへ移動し、これ以上移動不可能な状態になったら停止する。これにより、搭乗者が降りるための空間を考慮しなくてよいため、AT がちょうど収まる程度の大きさの空間にも入ることができ、より邪魔にならない場所へ移動することができる。
しかし、AT が機械的に隅や袋小路であると判断して停止したとしても、移動した場所が例えばドアの前でちょうど閉まっていただけであるなど、搭乗者が邪魔であると判断できる場合も存在する。その場合は、遠隔操作で、AT を移動させることで搭乗者の判断によって邪魔でないと思われる場所へ移動させることができる。もし、微調整を行っても搭乗者が邪魔でないと思われる場所へ移動させることができない場合は、そこへ駐機しおくことはできないため、AT を初めの位置に戻した後、もう一度方向の指定からやり直す必要がある。そして、もし搭乗者がAT が邪魔でない場所に停止したと判断できる場合は、待機状態としたまま、搭乗者は立ち去る。
しかし、搭乗者が駐機した際は人の邪魔にならない場所であったが、後から来た搭乗者以外の人にとって邪魔になる可能性が存在する。その場合は、AT が駐機していた場所から移動し、一定時間が経過した後は駐機していた場所に戻ることで、人の邪魔にならないような場所で待機することができる。そして、搭乗者が再び搭乗するために駐機モードを起動した位置にAT を呼び、再び走行することができる。
3.3 補助走行モード
補助走行を行うためには、周囲にある障害物の位置を把握する必要がある。そのため、レーザレンジセンサから1 度ごとに取得した距離情報を利用している。
4 つのレーザレンジセンサから取得した角度ごとの距離情報をレンジセンササーバPC で統合し、AT 中心の極座標に変換したものを、制御・自動走行PC に送信する。また、各角度における障害物までの距離をプロットした点を障害物点とする。障害物を認識したら、速度と移動方向を同時に決定する。それらの具体的な決定方法は次項で述べる。
3.3.1 速度調節
周囲にある障害物までの距離に応じて減速させる割合を決定することで速度の調節を行う。ただし、全方位すべての障害物に対して考慮する必要はないため、搭乗者の指定する方向に対して障害物を考慮するエリアを図のように設定した。
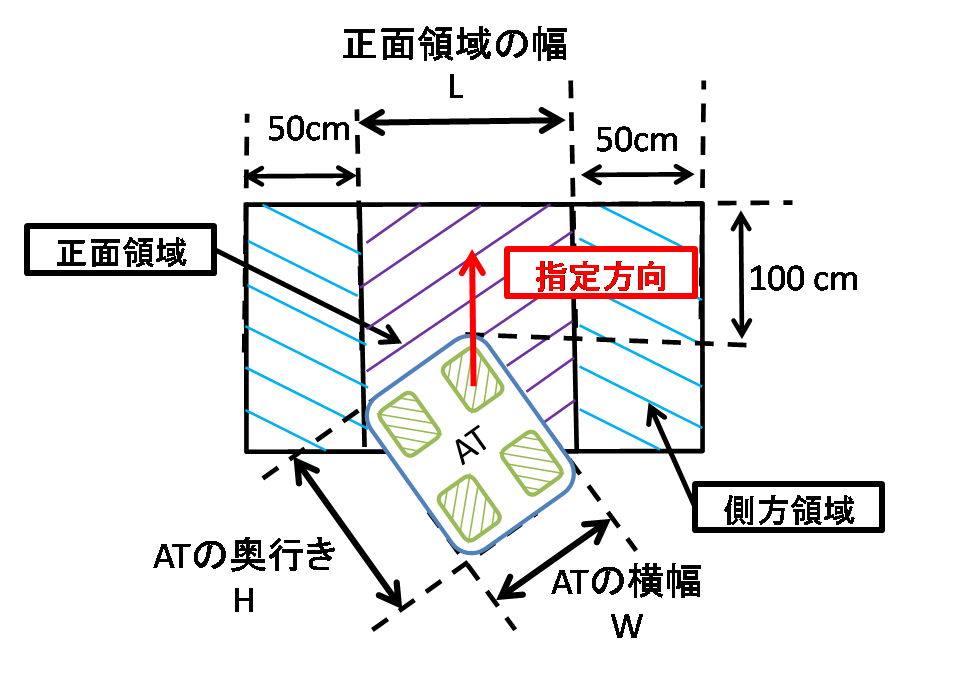
図3.2: 障害物の考慮領域
障害物を考慮する領域は、図に示すように正面領域と側方領域の2 種類の領域に分類される。AT が走行するために必要な幅は搭乗者の指定する方向により異なるため、図に示される計算式により正面領域の幅L を求めた。
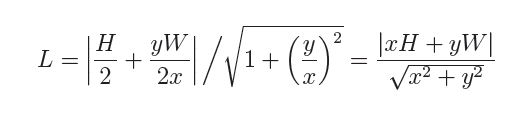
図3.3: Ex. 数式
図に示すように、W はAT の横幅、H はAT の奥行き、x,y はアナログスティックから取得した座標である。例えば、搭乗者の指定した方向が前方だった場合は、正面領域の幅L はWと等しくなる。また、搭乗者の指定した方向が右斜め45 度方向だった場合は、アナログスティックから取得した座標が y / x = 1となり、と計算される。
搭乗者の指定する方向から±90 度以内にある障害物点を考慮の対象とした。これは、搭乗者の指定する方向と逆の方向にある障害物がたとえAT と近い距離にあったとしても、搭乗者の指定する方向へ移動を行う際には影響がないためである。
正面領域については、障害物点を考慮するAT との距離を100 cm とした。これは、遠くの位置にある障害物を考慮して速度や方向の調節を行うと、搭乗者が障害物の近くへ行きたいと思っている場合には、搭乗者の思っている場所に行けない可能性があるが、考慮する対象の障害物が近すぎると、障害物を回避しきれず衝突してしまったり、搭乗者の指定した方向と調節を行う方向の差が大きくなってしまうためである。
また、搭乗者の指定する方向の障害物だけを対象とすると、扉を通り抜ける際など移動する方向に走行可能な空間があるが、走行可能な領域の幅はとても狭い場合に減速を行うことができない。そこで、側方領域においては、障害物点を考慮するAT との距離を50 cm とした。
速度の調節を行う際は、搭乗者がアナログスティックを傾けた角度から計算された速度を元に、センサから受信した距離情報を利用して減速する割合を決定する。速度の調節は、図の手順で行う。以下にその詳細を述べる。
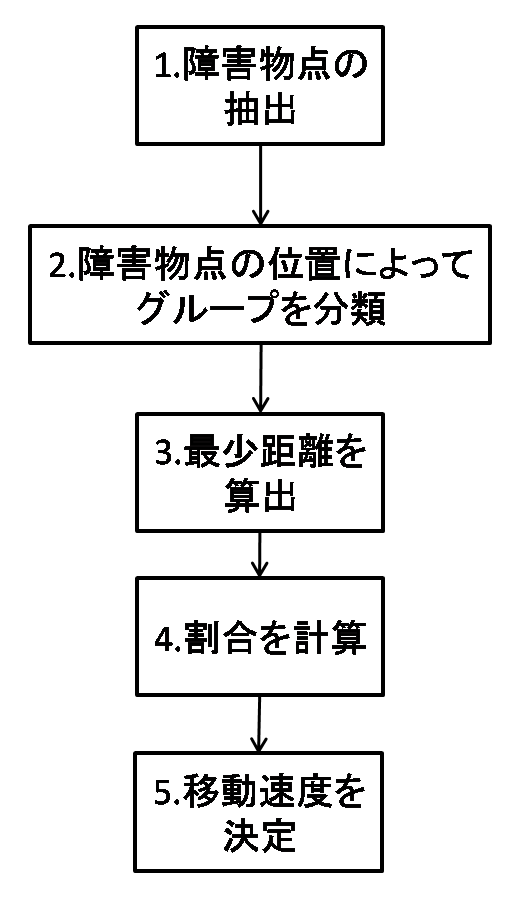
図3.4: 速度を決定する手順
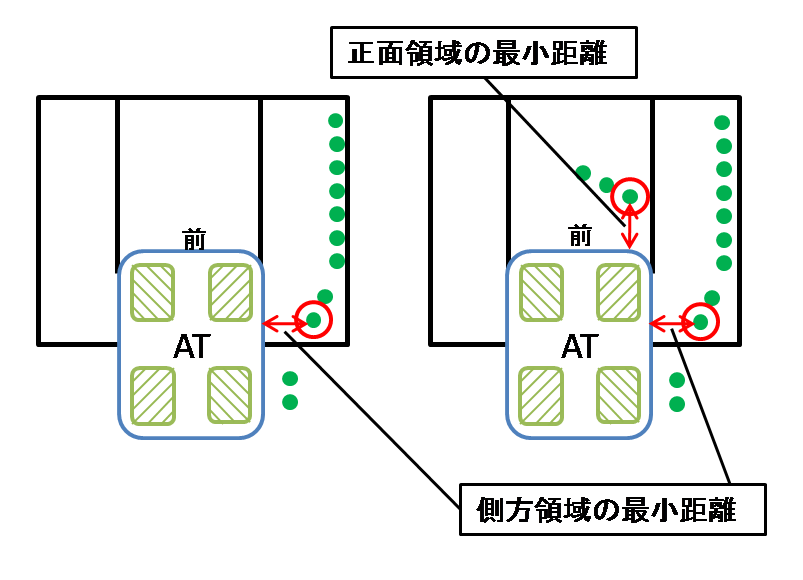
図3.5: 速度の決定例
-
1.搭乗者の指定する方向から±90 度以内にある障害物点のうち、AT との距離が100 cm 以下の障害物点を抽出する。
-
2. 障害物点が正面領域内にあるか側方領域内にあるかで2 つのグループに分類する。正面領域の幅は搭乗者の指定する方向により異なるため、レンジセンサから取得した際の角度だけでグループを分類することはできない。また、障害物までの距離によってもグループが異なる場合が存在するため、抽出した障害物点のすべてについて座標の位置を調べ、2 つのグループに分類する。
-
3. 2 つのグループそれぞれにおいて、AT までの最小距離を求める。最小距離は、角度による大きさの違いを考慮するために、レーザレンジセンサで取得した距離情報から、それぞれの角度におけるAT 個体の大きさを引いた値として求める。図の場合、赤丸で囲まれた点が最小距離となる障害物点である。
-
4. 3 で求めた最小距離と各グループにおいて設定されたエリアの障害物点を考慮する領域の距離から、接近している割合を計算する。図の左の場合の最小距離を30 cm とすると、側方領域の距離は50 cm であるため、30=50 = 0:6と計算される。また、図の右の場合の最小距離をそれぞれ30 cm とすると、正面領域の距離は100 cm であるため、30=100 = 0:3 と計算される。
-
5. 4 で計算した、2 つのグループの接近している割合のうち、小さい値と搭乗者の指定した速度を乗算することにより、移動速度を求める。図の左の場合は、正面領域には障害物が存在せず、側方領域が0.6 と計算されるため、乗算する割合は0.6 となる。また、右の場合は、正面領域が0.3、側方領域が0.6 と計算され、乗算する割合は0.3 となる。
以上のように計算を行うことにより、障害物と近い場合はより減速するため、安全に走行することができる。
しかし、これでは搭乗者の入力した速度が遅かった場合に、障害物までの距離を計算して減速することによって、移動が可能であるにもかかわらず計算された速度が低速すぎて、ほとんど移動を行うことができない場合が存在する。そこで、移動速度の下限値を設定し、計算された速度が下限値を下回っている場合は下限値を利用する。なお、障害物があり移動することができない場合は下限値を利用せず移動速度を0 とする。これにより、障害物との距離に応じて減速させることができる。
3.3.2 移動方向調節
移動方向は、搭乗者の指定する方向に基づいて図の手順で決定する。
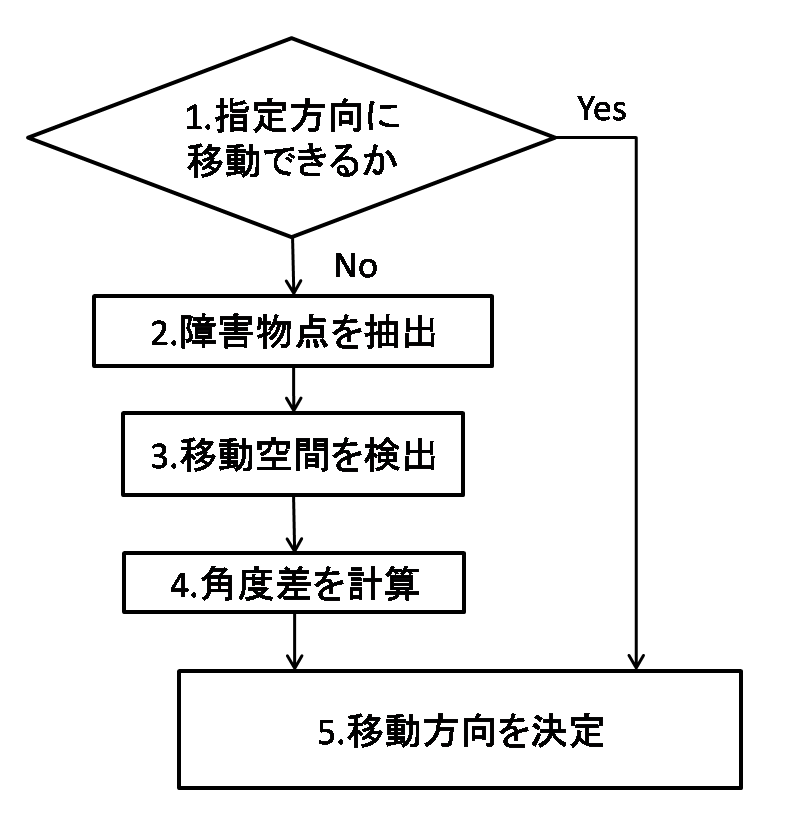
図3.6: 移動方向を決定する手順
-
1. 搭乗者の指定した方向にATが走行可能かを調べる。式() に基づいて指定した方向にAT が走行するのに必要な幅を計算し、図に示すように、ATから前方100 cm 以内の距離の領域を走行可能領域とする。レーザレンジセンサで取得した値を調べ、走行可能領域に障害物が存在する場合は、次のステップ以降で進行方向を計算する。
-
2. レーザレンジセンサの値から、指定した方向から±90 度以内で、指定した方向の100 cm 以内にある障害物点を抽出する。
-
3. AT が移動可能な空間を検出する。考慮する障害物点間の距離を計算し、ATの走行に必要な幅より小さければ、走行不可能であるとみなす。これを繰り返して、走行可能な空間を見つける。
-
4. 3 で見つけた空間の中心と指定方向との角度差を計算する。空間が複数検出された場合はその全ての空間について計算する。
-
5. 4 で計算された角度差が最も小さい方向を移動方向として決定する。
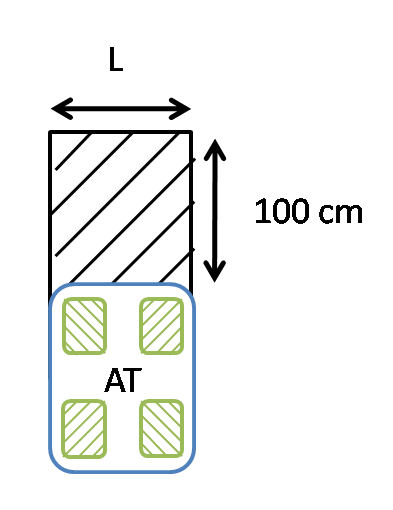
図3.7: 走行可能領域
以上のように計算することで、障害物と衝突することなく移動が可能な方向が決まる。
角度差が小さいと搭乗者の指定方向に近い方向へ移動することができるが、計算された方向が、搭乗者の指定方向と全く異なる方向であった場合、そのまま移動方向としてしまうと、搭乗者の意図と一致しない。そこで、移動方向と指定方向との角度差を90 度以内とした。もし、計算された角度差が90 度以上である場合は、移動方向の調節は行わない。
例えば、図のような狭空間を走行する場合、搭乗者の入力だけにしたがって走行すると、搭乗者は全方位にある障害物に注意を払いながら自分の操作に集中しなければならず、衝突せずに移動を行うためには、搭乗者が何度も入力を変更しなければならない。しかし、補助走行モードによって移動方向の調節を行うことで、搭乗者が入力を細かく変更しなくても障害物と衝突することなく走行することができる。
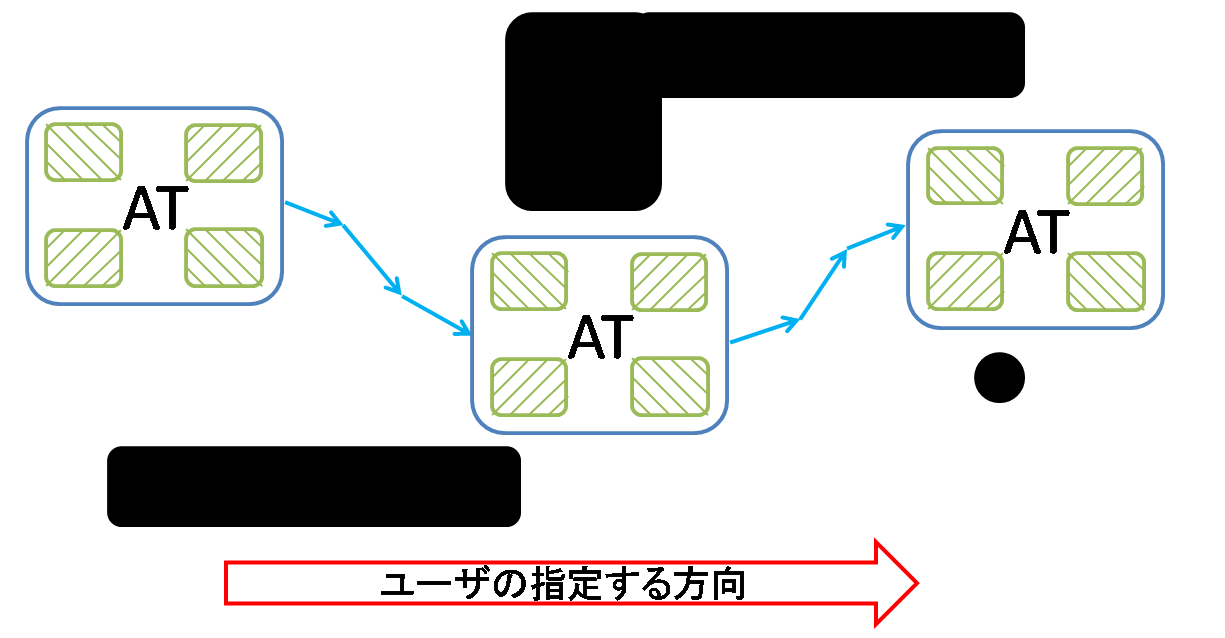
図3.8: 狭空間における移動例
3.3.3 移動方向の記録とコースへの復帰
補助走行で、障害物を避けるように移動方向を調節して走行を続けると、本来走っていたコースから大きく逸れてしまう場合や、廊下等を壁に沿って補助走行を行っていたのに障害物を避けることで廊下の中心へ移動し、そのまま移動を続けることで歩行者の邪魔となる場合などがある。そこで、移動方向を調節した後に、障害物を回避する前に走行していたコースへ戻るという機能を追加した。
指定方向と移動方向が異なる場合は、指定方向と移動方向の差分と出力される速度をベクトルとして記録する。指定方向と移動方向が異なる間、記録したベクトルを加算し続ける。指定方向と移動方向が同じ場合は、障害物の回避が終了したとみなし、元に戻ることができるかを調べる。つまり、指定方向を軸対称としたベクトルを計算し、その方向に移動を行うことができるかを計算する。もし移動を行うことができる場合は、出力された速度の分だけ記録したベクトルを減算する。この動作を、記録したベクトルの和が0 以下になるまで続ける。これにより、調節を行った角度の分だけ戻し、元のコースへ戻ることが可能となる。
また、搭乗者の指定する方向が変更された場合は、目的のコースを変更したとみなして、搭乗者の指定する方向が変更される前に蓄積したデータを消去する。
3.4 駐機モード
AT に搭乗して移動している場合でも、ショッピングモールで個々の店に入る際など、必要に応じてATを乗り降りする必要がある。その場合に、搭乗者の降りたい場所にAT を放置しておくと他の歩行者や乗り物の邪魔になってしまう。また、自動車の駐車場のような駐機場がすべての建物内にあるわけではないため、人の邪魔にならない場所へAT を駐機しておく必要がある。
搭乗者が邪魔にならない場所へAT を操縦して移動させることも可能であるが、邪魔にならない場所は、隅や袋小路などAT と幅がほとんど等しい場合などが多く、搭乗者が降りられなくなってしまうことが想定される。搭乗者が降りられるスペースを確保して停止させると、多くの幅をとることになり、AT を2 台止めることが可能な場所であった場合に1 台しか止めることができずスペースの無駄となる。そこで、搭乗者が降りた後で自動的に人の邪魔にならないような隅や袋小路へ移動させる駐機モードという新たな走行モードを導入した。
3.4.1 駐機モードの流れ
駐機モードは搭乗者が人の邪魔にならない場所を見つけた際に、現在にいる場所からどの方向へ移動したらその場所に辿り着くことができるのかという情報を、AT に与えることで起動するモードである。駐機モードを開始するには、第2章の図に示すZ ボタンを押しながら、アナログスティックを使って邪魔にならない場所の方向を入力する。
駐機モードは次の4 つのプロセスで構成される。
-
指定された方向へ移動し、袋小路や隅など人の迷惑にならない場所へ移動して停止するためのプロセスである。
駐機プロセス
-
微調整プロセス
駐機プロセスが終了した後に、AT の停止した場所を搭乗者が遠隔で微調整することで搭乗者が本当に邪魔にならないと判断できる場所へ移動させるためのプロセスである。
-
一時退避プロセス
搭乗者以外の人が起動するプロセスであり、このプロセスが起動されると、駐機している場所から動いて一定時間その場所を空けるプロセスである。
-
帰還プロセス
搭乗者が再び搭乗するために元の位置へ戻ってくるように命令するプロセスである。ここでは、駐機モードを起動させた場所が帰還プロセスにおいて元に戻るべき場所であるとする。帰還プロセスが実行されると、障害物を回避しながら移動し、駐機モードを起動させた場所へ戻ってくる。
以上のプロセスを目的に応じて使い分けることにより、AT を人の邪魔になりにくい場所で駐機させておくことが可能である。
想定しているプロセスの流れは図の通りである。以下にその詳細を述べる。
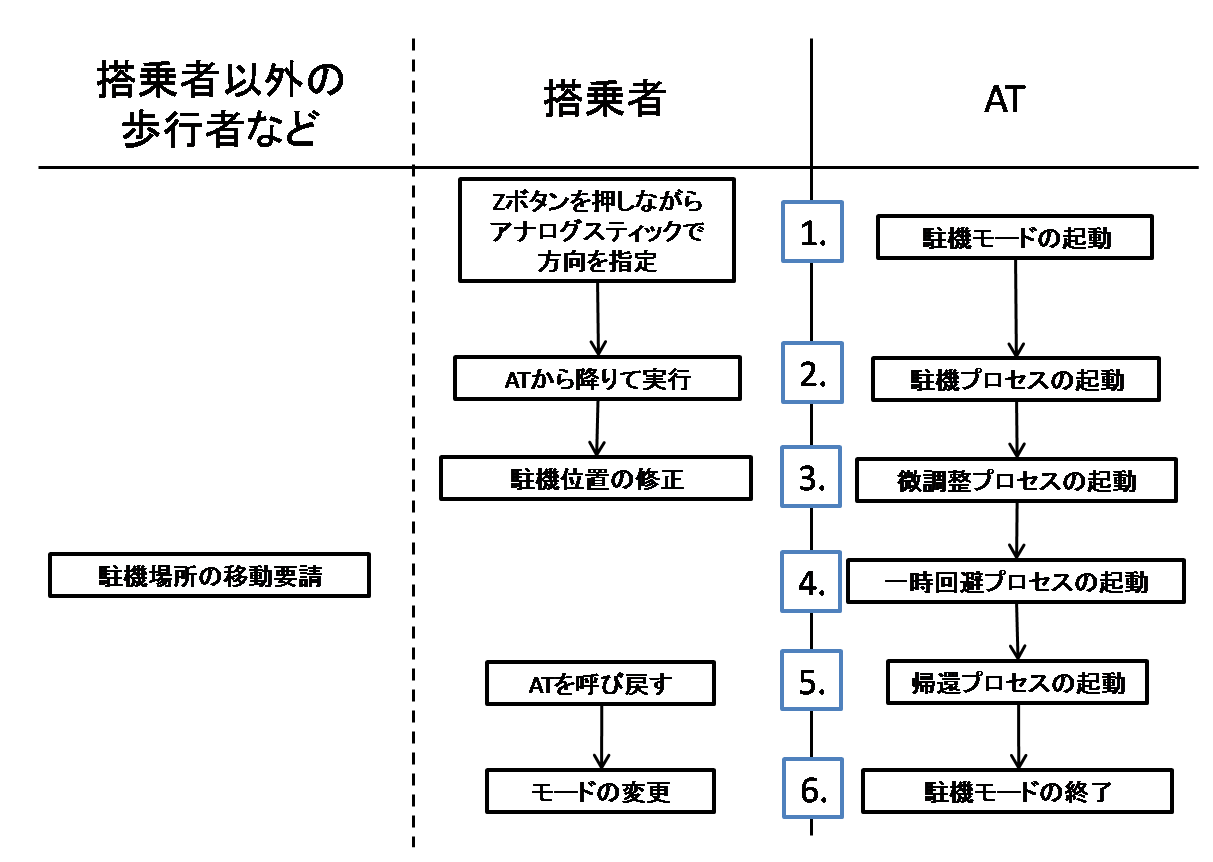
図3.9: プロセスの流れ
-
1. 搭乗者がコントローラのZ ボタンを押しながらアナログスティックを用いて方向を指定することで駐機モードを起動する。
-
2. 搭乗者がAT から降りてコンソールに表示されている実行ボタンを押すと、駐機プロセスが起動し、AT は指定された方向へ移動を行う。移動ができなくなったら駐機プロセスを終了する。
-
3. 搭乗者が人の邪魔になり、停止位置を微調整する必要があると判断した場合、微調整プロセスを実行することで、搭乗者が駐機位置を微調整することができる。搭乗者はAT が邪魔にならない場所へ移動したと判断したら、微調整プロセスを終了しその場から立ち去る。
-
4. 搭乗者以外の人が駐機されてあるAT を一時的に移動させたいときに第2章の図に示した、ATの前後左右に設置された一時退避ボタンを押すと一時退避プロセスが起動し、その場から少し移動する。一定時間が経過すると、初めに駐機していた位置に戻ることにより、必要に応じた時間のみ場所を空けることができる。
-
5. 搭乗者が再びAT に搭乗しようと思ったときに帰還プロセスを実行すると、AT が駐機モードを起動した場所へ移動する。駐機モードが実行された位置に戻った時点で帰還プロセスを終了する。
-
6. 搭乗者がAT に再び乗り、走行モードを例えばマニュアル走行モードに変更させることにより、駐機モードが終了する。
駐機モードを実現することで、搭乗者は駐機場の手前で方向を指定して、AT から降りることができるため、袋小路など空間がAT の幅と同程度の幅しかない場所においても、乗り降りのスペースを考慮することなく、AT を駐機することが可能となる。そのため、同じ広さの空間でも搭乗者の乗り降りのスペースの分だけより多くのAT を駐機することが可能となる。
本研究では、駐機モードのプロセスのうち、駐機プロセスについて実装を行った。次節で駐機プロセスの詳細について述べる。
3.4.2 駐機プロセス
駐機プロセスは、駐機モードが設定されると最初に実行されるプロセスである。搭乗者が指定した方向へ移動していき、隅や袋小路などを発見し移動できなくなったら停止する。ここでは、隅や袋小路は人の邪魔になりにくい場所であると仮定している。
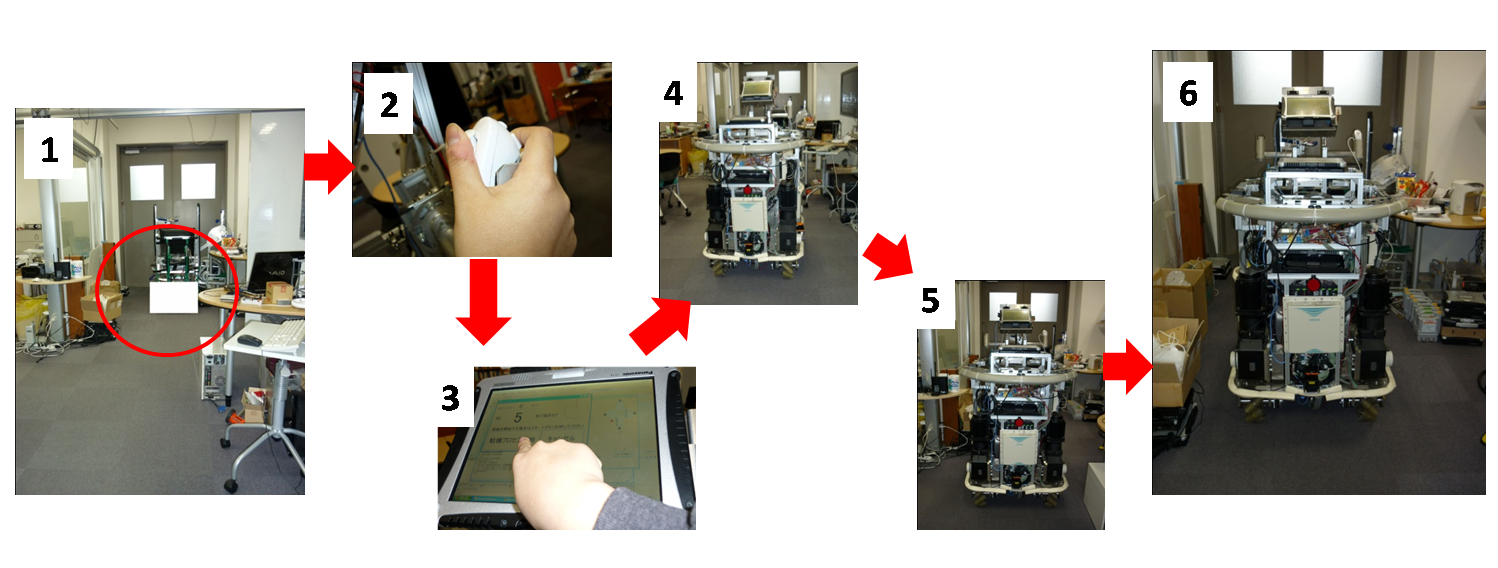
図3.10: 駐機プロセスの流れ
まず、搭乗者が人の邪魔にならない場所を発見する(図-1)。そして、現在ATのいる位置から停止させたい場所の存在する方向を指定する(図-2)。搭乗者は、AT から降りてコンソールに表示されている実行ボタンを押し、AT から少し離れる(図-3) と、駐機プロセスが実行され、搭乗者が指定した方向へ移動する(図-4)。指定した方向に障害物を発見した場合は、袋小路かどうかを判断し違う場合には障害物を回避しながら移動する(図-5) 。そして、隅や袋小路を発見して、移動できなくなったら停止し、駐機プロセスが終了する(図-6)。
また、搭乗者が実行ボタンを押してから、駐機プロセスが終了するまでは、図の手順で実行される。
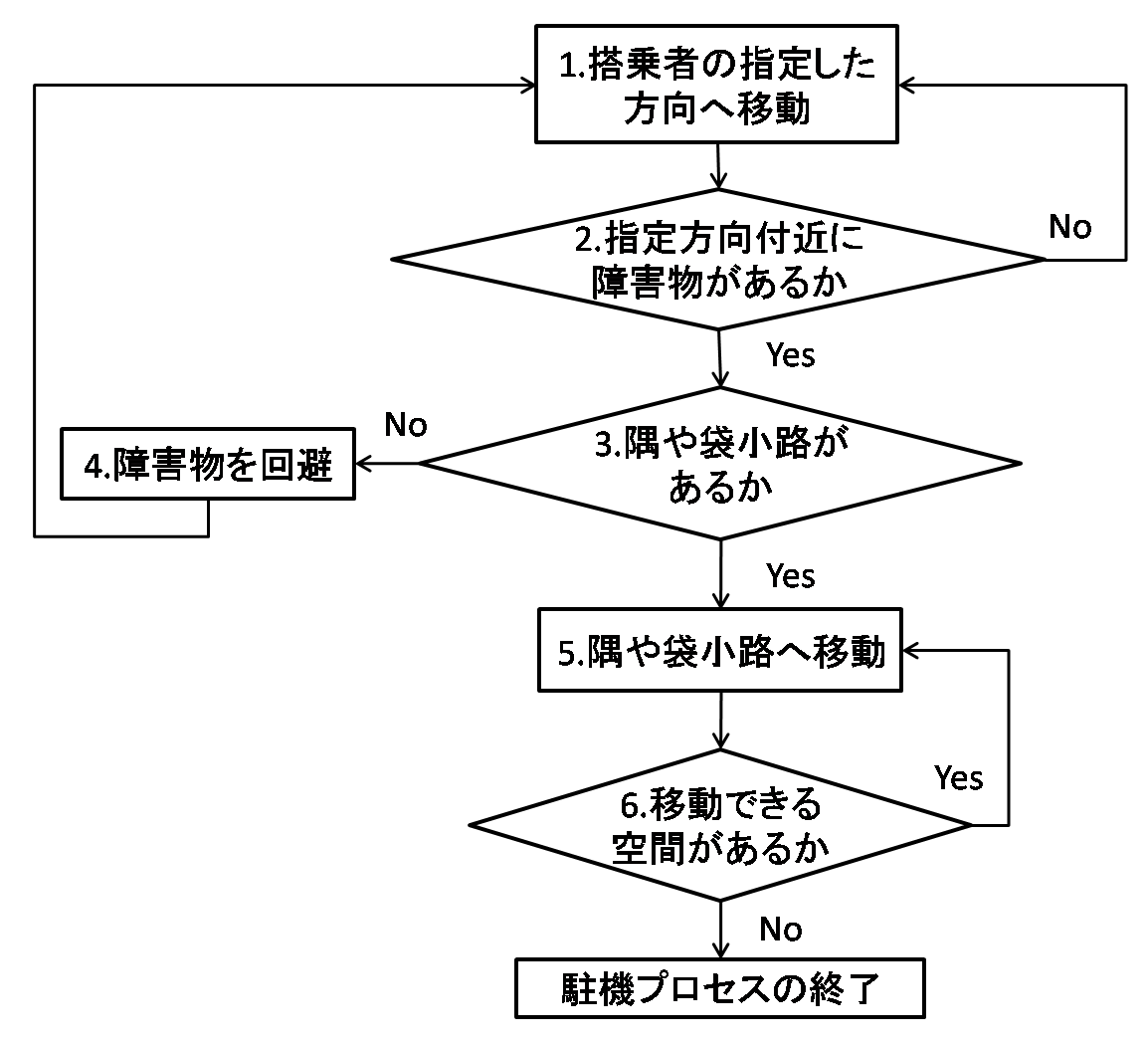
図3.11: 駐機プロセスの手順
-
1. 搭乗者が指定した方向へ移動する。
-
2. センサで取得した距離情報から障害物点がAT から100 cm 以内に存在するかを確認する。障害物点が100 cm 以内に存在しない場合はAT の付近に隅や袋小路は存在しないため、指定した方向へ移動可能であると判断できる。
-
3. 障害物をAT の付近に発見した場合、その障害物周辺が隅や袋小路であるかを確認する。障害物の位置や大きさを計算し、AT が入ることのできる幅であるか、隅や袋小路といった場所であるかどうかを確認する。
-
4. 隅や袋小路でない場合は、その障害物は回避すべき障害物であるとして、障害物を回避し、指定した方向への移動を続ける。
-
5. 検出した障害物の周辺が隅や袋小路であった場合は、移動すべき場所であるとして、その障害物の場所へ移動する。
-
6. 障害物へ近づいていき、これ以上進むことのできない状態になった時点で停止し、駐機プロセスを終了する。
このように動作をすることで、指定された方向にある隅や袋小路を検出し、その近くに移動することが可能である。
3.5 おわりに
本章では、搭乗者の操縦に基づき障害物の回避をしながら走行を行う補助走行モードと、搭乗者が降りてATを停止させるための場所へ移動する駐機モードについて述べた。それぞれの移動は障害物の位置とAT 自身の大きさを比較することで、その方向へ移動できるかを計算することにより実現できる。また、駐機モードについては、駐機プロセス以外のプロセスについてはまだ実現されていないため、今後実現する必要がある。次章では、本章で述べた補助走行モードを用いた走行実験について述べる。
4 実験と考察
搭乗者が操縦して移動を行う際は、搭乗者の指定する方向に走行すると障害物と衝突してしまう場合がある。このような危険を回避するためには、障害物を避ける必要があるが、搭乗者の操作によって適切に避けるには細かい操作が必要である。前章では、補助走行モードを導入することにより、レーザレンジセンサの値から移動が可能な方向と、安全に移動できる速度を決定し、障害物と衝突しない方向への移動と速度を調節する手法について述べた。この手法によって、搭乗者が指定方向を細かく変更しなくても、障害物と衝突することなく安全に移動できることを確認するための実験を行った。本章では実験内容と実験結果を説明し、その考察を述べる。
4.1 実験内容
本実験は、名古屋大学IB 電子情報館南棟3F で行った。被験者は過去にAT を操縦した経験のない4 名の男子学生である。図のような2 種類のコースを設定し、被験者にAT に搭乗して移動してもらった。被験者には、あらかじめアナログスティックを倒す方向へAT が移動でき、倒す傾きによって速度を調節できることを説明してある。
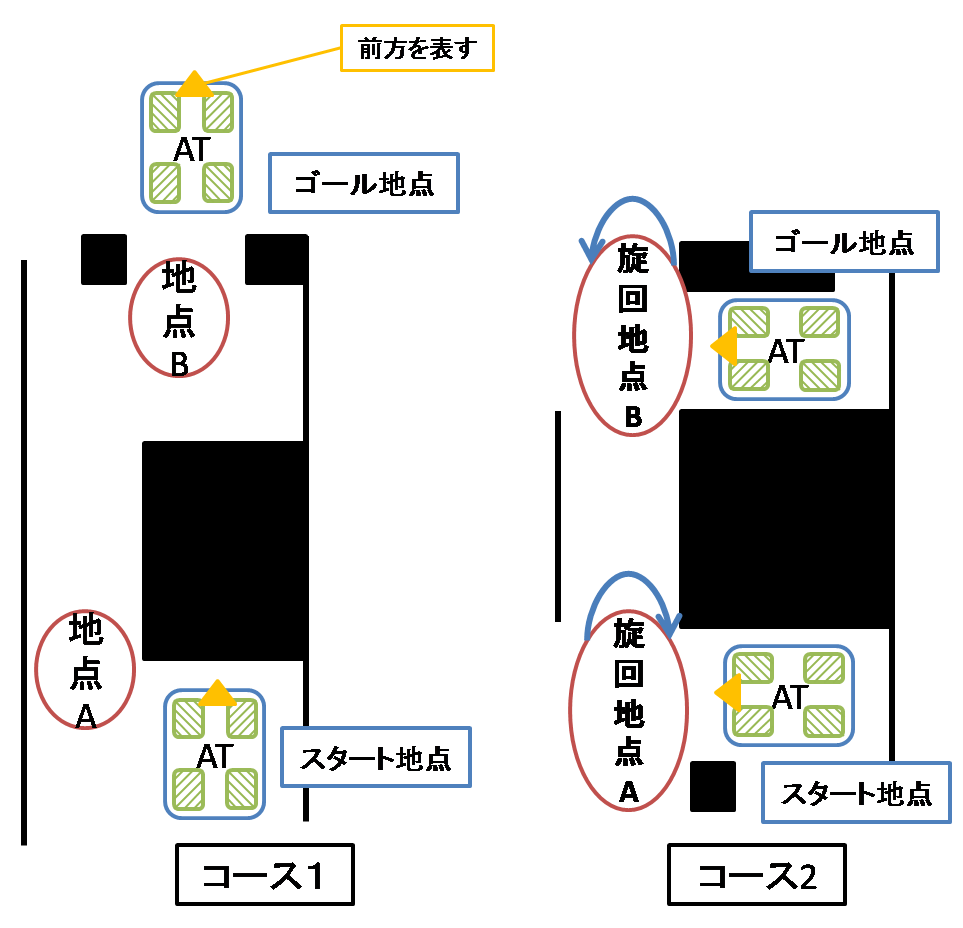
図4.1: 実験で使用したコース1(左)とコース2(右)
本実験では、搭乗者が指定方向を細かく変更しなくても、障害物と衝突することなく安全に移動できるかどうかを確認するため、衝突する危険があり、何度も細かい操作をする必要があるコースを設定した。
コースを設定するにあたり、実際の狭空間として考えられる状況を以下の4 つに分類し、各々の特徴や注意点について述べる。
-
状況1 壁と障害物の間
狭空間の入り口へ侵入する目印として障害物や壁を利用することができる状況である。この状況では、壁に近寄ることで走行できるため、空間に侵入する際には壁との距離に特に注意する必要がある。
-
状況2 障害物間の隙間
ドアを通り抜ける場合など、狭空間の入り口へ侵入する前は比較的広い空間があり、目測で障害物の位置を判断しなければならない状況である。この状況では、両側の障害物までの距離を保ちながら、空間に侵入する必要がある。
-
状況3 狭い通路
狭空間へ入った後、すぐに空間が広がっているわけではなく、狭空間が続いている状況である。この状況では、両側の壁までの距離を一定に保ちながら、指定する方向を大きく変更せずに走行する必要がある。
-
状況4 旋回が必要な場所
進行方向の空間を走行するには、ATをその場回転させる必要がある状況である。この状況では、狭空間が走行可能な向きに確実に旋回させる必要がある。
これらの状況を組み合わせることで実際のさまざまな狭空間を実現できると考えられる。また、後方へ移動を行う場合は搭乗者が後ろを振り返って障害物との距離を確認する必要があるため、操作ミスが発生しやすい。さらに、後方は搭乗者から見ると前方より死角が多いため、前方へ移動するよりも注意して走行しなければならない。以上の状況を考慮してコースを設定した。
図のコース1 では、スタートからゴールまで回転を行わず、平行移動のみを行いながら走行する。ここでは、狭空間の状況として挙げられる1、2、3 の3 つの状況を含めた。具体的には、壁のほうへ近寄り、地点A を通過する。これにより、状況1 に遭遇したことになる。そして、壁との隙間を通り抜け地点B の方向へ移動する。これにより、状況3 に遭遇したことになる。最後に、2 つの障害物の間を通り抜けるように移動する。これにより、状況2 に遭遇したことになる。
また、コース2 については、平行移動では走行することができないコースであるため、適宜旋回を行いながら走行する。ここでは、狭空間として挙げられる2、3、4 の3 つの状況を含めた。さらに、走行中に後方への移動も行う。具体的には、前進し旋回地点Aへ移動する。旋回地点Aで時計回りに90 度回転した後、前進して、旋回地点B へ移動する。これにより、状況3 に遭遇したことになる。旋回地点B で反時計回りに90 度回転した後、後退してゴール地点まで移動する。これにより、状況2 に後退動作で遭遇したことになる。
なお、AT が前後方向へ走行するための空間の幅を100cm とした。これは、ATが前後方向へ走行する際の個体の横幅が80cm であり、安全のために両側に10cm程度ずつの余裕を持たせたためである。
コース1 において、補助走行モードとマニュアル走行モードでそれぞれ3 回ずつ走行してもらった後、コース2 においても同様にそれぞれ3 回ずつ走行を行ってもらった。
安全に走行可能であったかは、衝突した回数によって判断することができる。簡単な操作で走行可能であったは、操作回数によって判断することができる。また、補助走行とマニュアル走行で同じように安全に走行可能である場合は、速く移動ができた方がよい。そのため、移動中に搭乗者がアナログスティックを使用して指定した方向と速度(操作回数の計測に利用)、スタートからゴールまでの所要時間、障害物までの距離(障害物との衝突の検知に利用) を測定した。
4.2 結果と考察
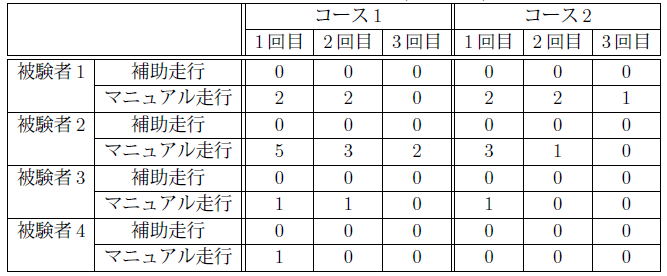
図4.2: 表:移動中の衝突回数(単位:回)

図4.3: 表:移動中の操作回数(単位:回)
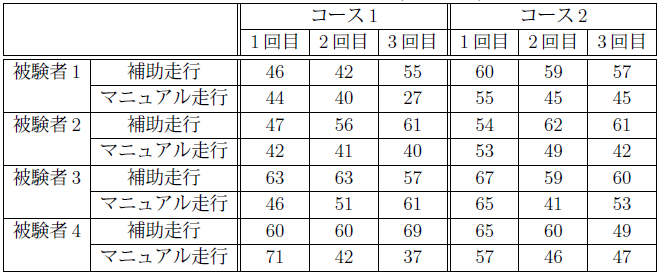
図4.4: 表:移動に要した時間(単位:秒)
表は移動中に障害物と衝突した回数を示している。表は、搭乗者が指定方向を変更する操作を行った回数を示している。この操作回数は、指定方向が直前の方向と比較して10 度以上変更されている場合を1 回と数えた。ただし、搭乗者が指定した速度が小さい場合は、角度の変更量が大きくてもAT が移動を行う際には影響を与えないものとして、指定した速度が最大値の1 / 10 以下の場合を除いている。表は、スタートからゴールに到達するまでの所要時間を示している。参考のために、図、、、で搭乗者2 の走行時間と搭乗者が指定した方向の関係、図、、、で搭乗者2 の走行時間と障害物との最短距離の関係のグラフを示す。
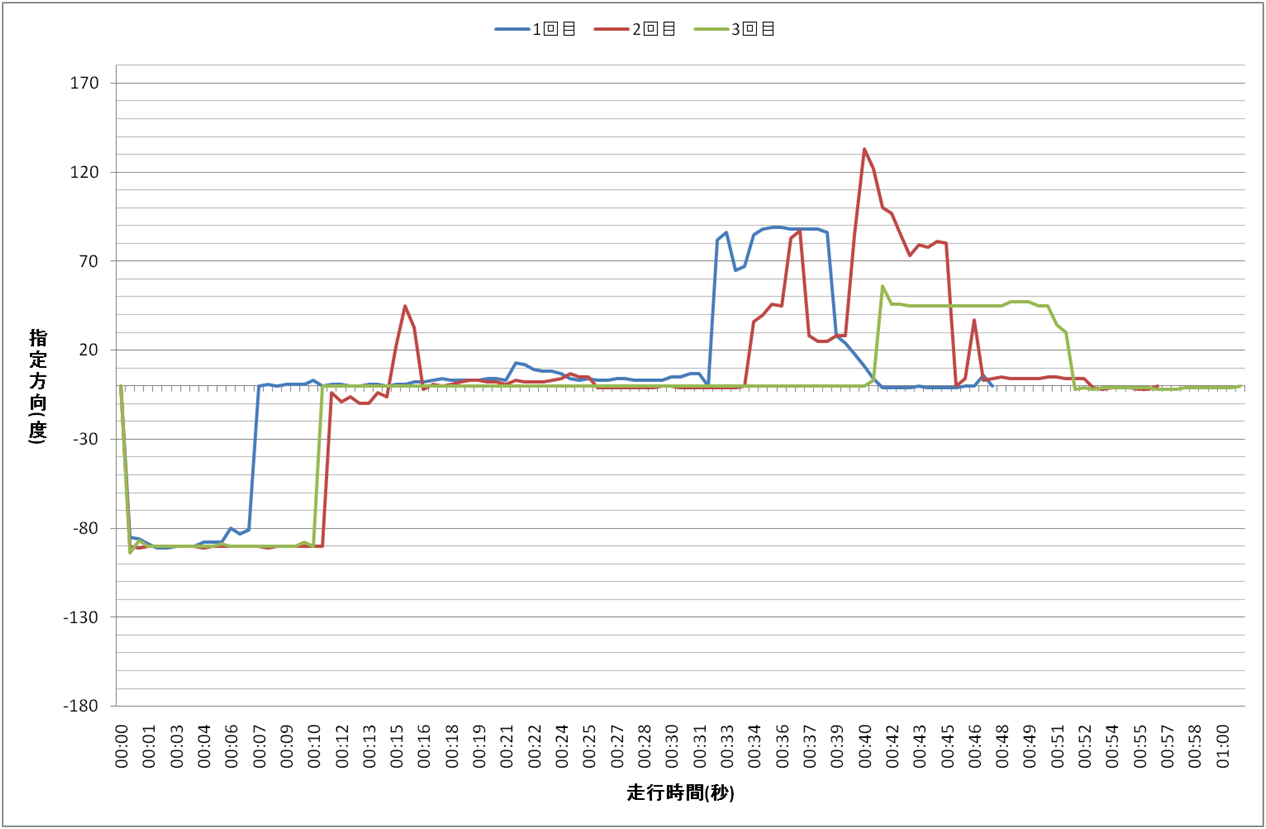
図4.5: コース1の補助走行モードにおける走行時間と指定方向の関係
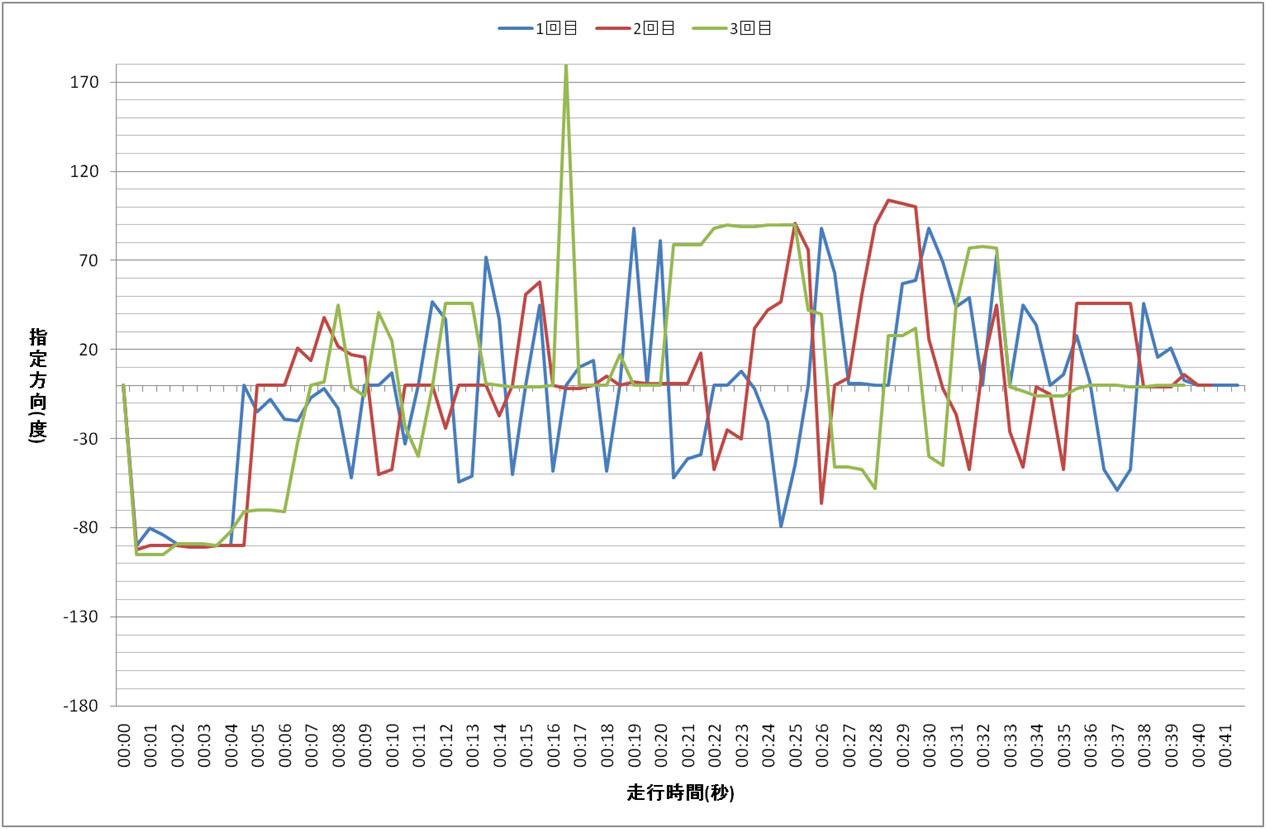
図4.6: コース1のマニュアル走行モードにおける走行時間と指定方向の関係
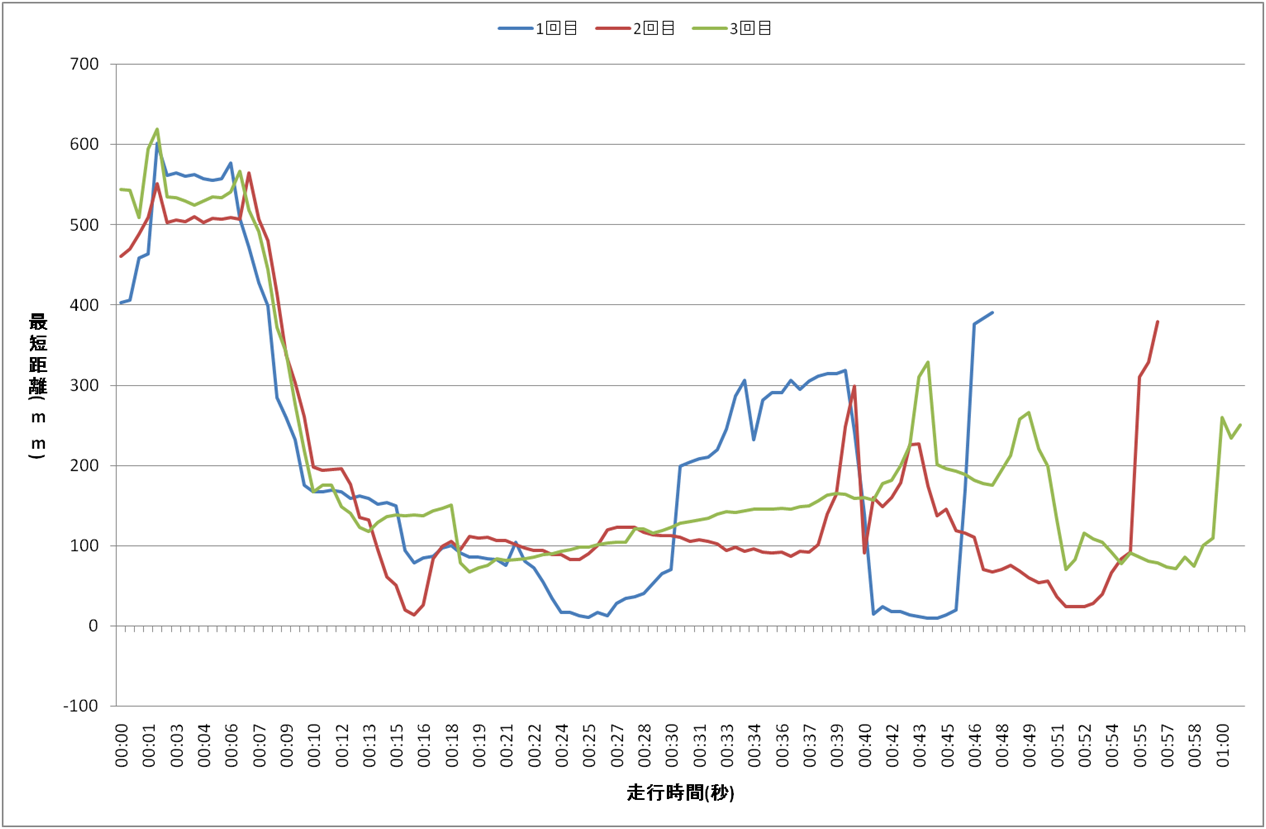
図4.7: コース1の補助走行モードにおける走行時間と最短距離の関係
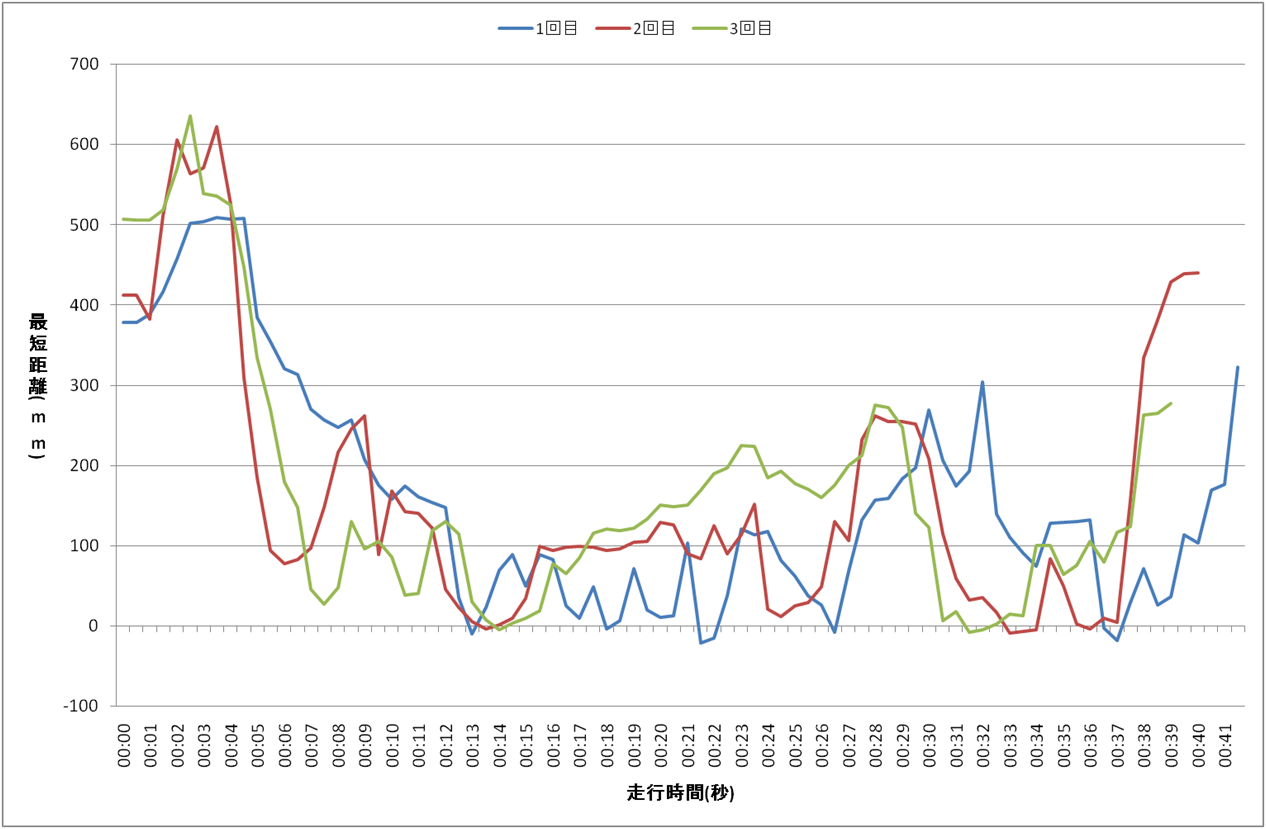
図4.8: コース1のマニュアル走行モードにおける走行時間と最短距離の関係
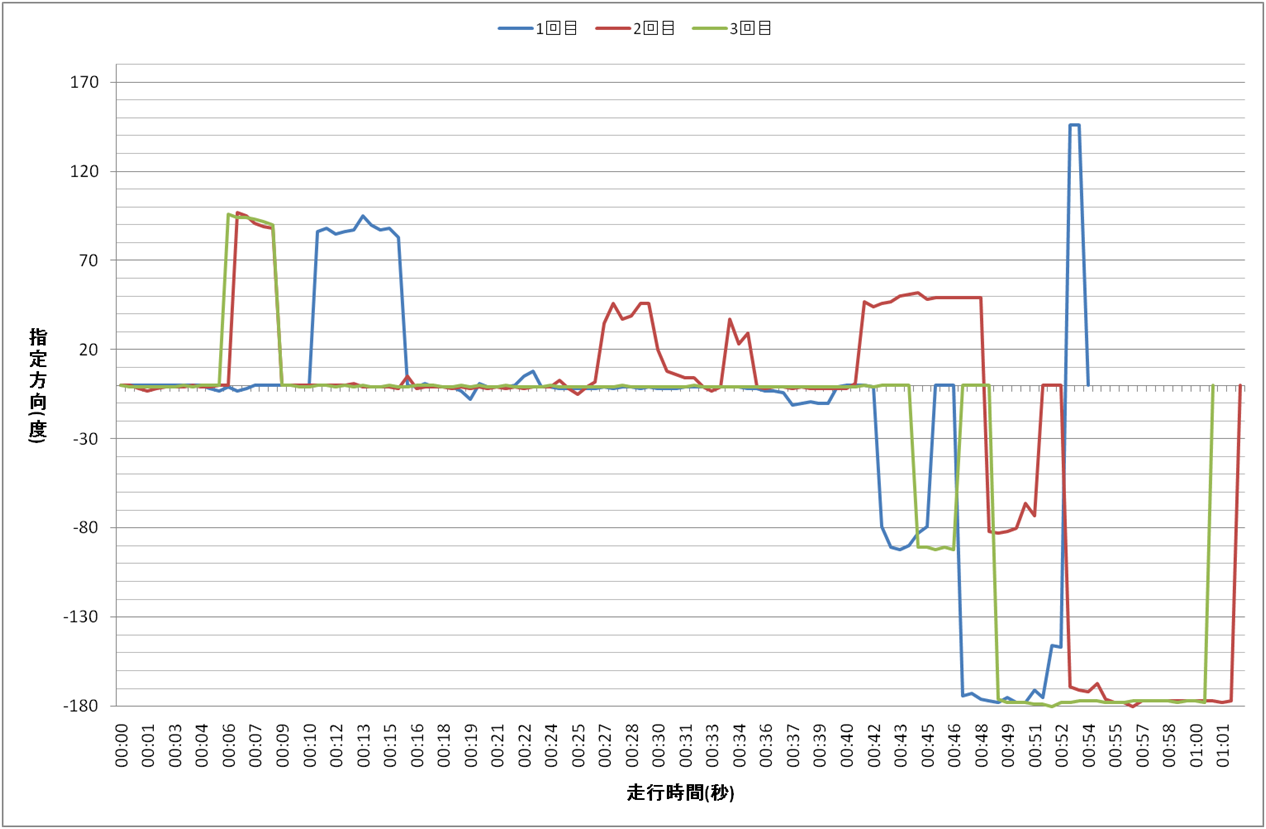
図4.9: コース2の補助走行モードにおける走行時間と指定方向の関係
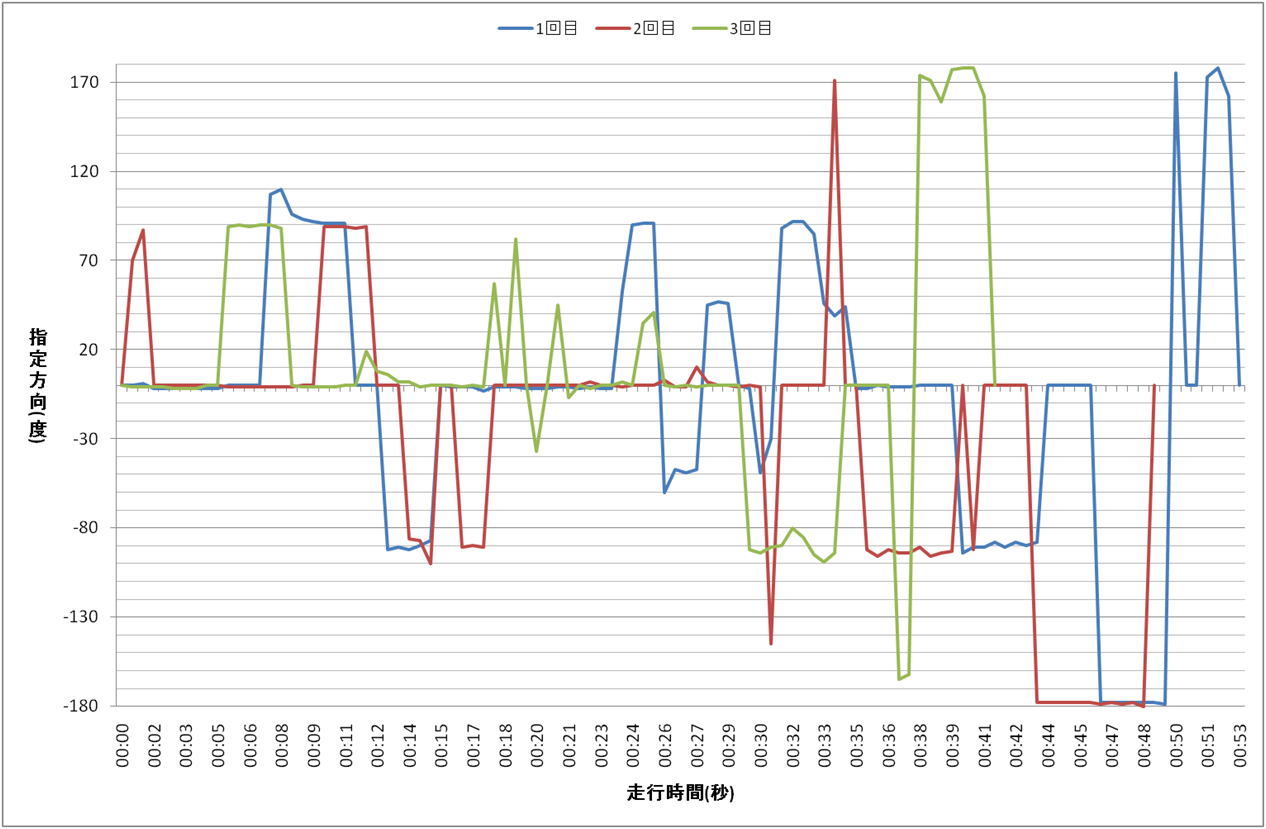
図4.10: コース2のマニュアル走行モードにおける走行時間と指定方向の関係
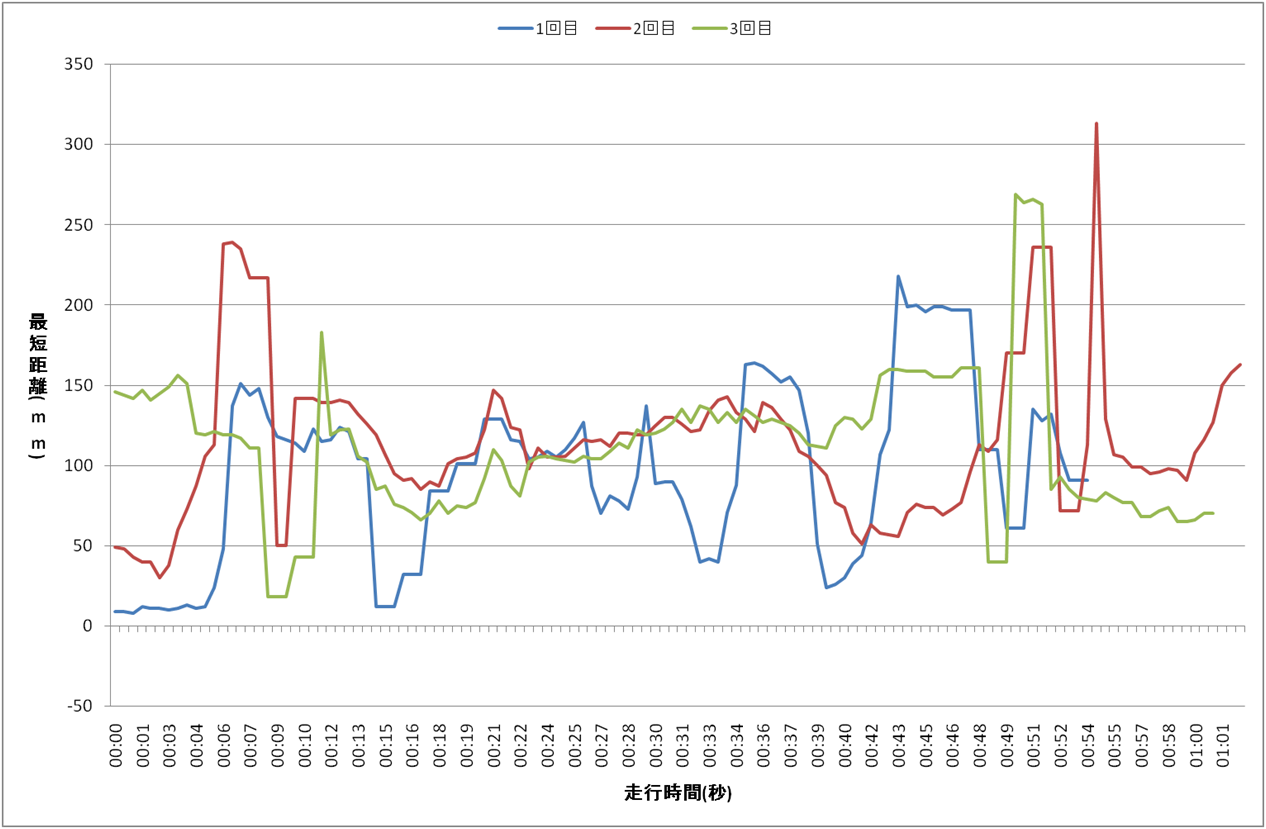
図4.11: コース2の補助走行モードにおける走行時間と最短距離の関係
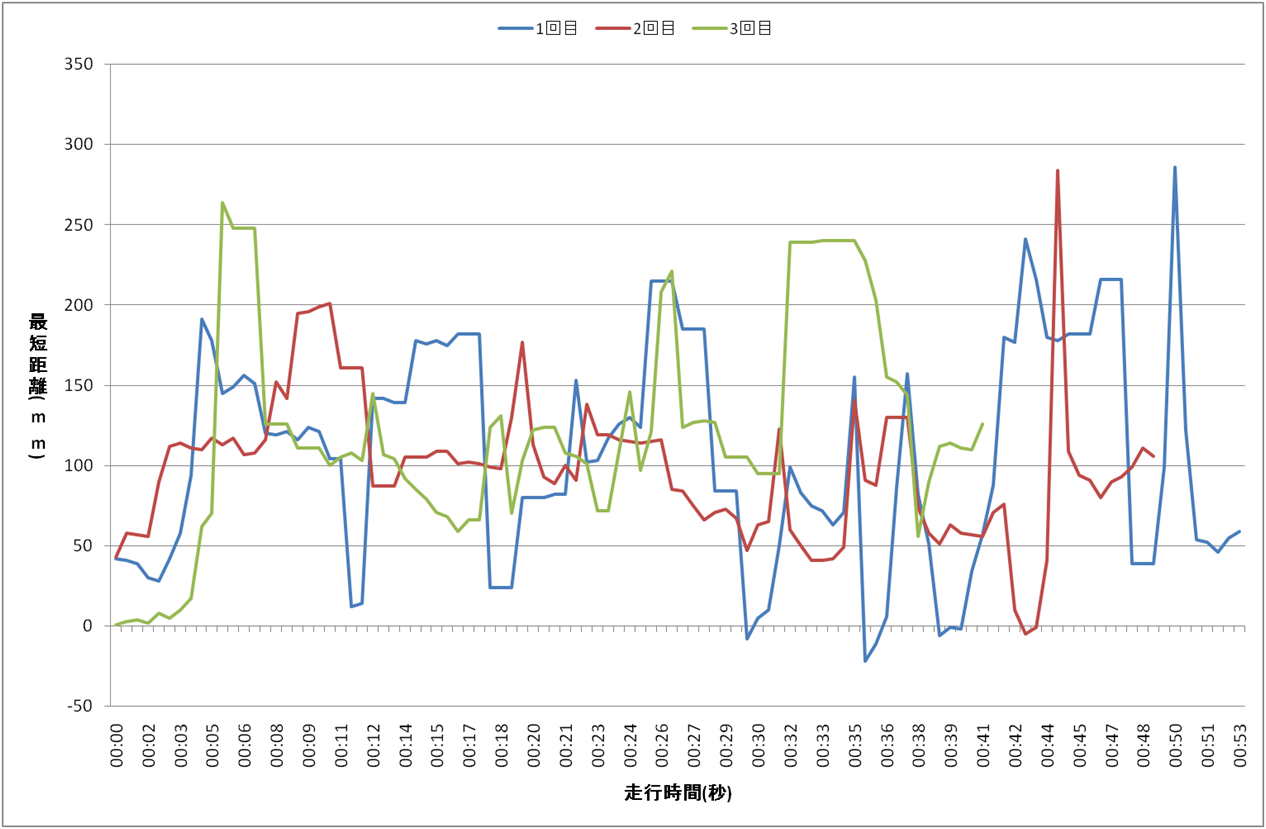
図4.12: コース2のマニュアル走行モードにおける走行時間と最短距離の関係
次に、実験結果について述べる。
4.2.1 移動中の衝突回数について
表に示した衝突回数の結果について述べる。補助走行モードでは、すべての被験者が1 度も衝突することなくゴールまで移動できたのに対して、マニュアル走行モードでは、コース1 ではすべての被験者が障害物と衝突している。また、コース2 において、被験者4 は3 回とも障害物と衝突することなくゴールまで移動を行うことができたが、被験者1 は3 回とも障害物と衝突している。
これは、コース2 を走行したのはコース1 の後であったことから、コース2 を走行する際にはATの操作と移動に慣れ、安全に移動できるコツをつかむことができたからであると考えられる。また、被験者1 がコース2 で障害物と衝突したのは3回とも後方に移動する動作を行った時であったことから、コース1 で基本的な操縦には慣れたが後方へ移動は行っていなかったため、うまく進めなかったと考えられる。
これより、補助走行モードではマニュアル走行モードと比較して衝突回数が少ないことから、安全に走行することができたと言える。
4.2.2 操作回数について
次に、表に示す操作回数の結果について述べる。補助走行モードとマニュアル走行モードを比較すると、どの被験者でもマニュアル走行モードの方が操作回数が多い。コース1 では、マニュアル走行モードと補助走行モードを比較すると、操作回数に約3 倍の差が見られた。
マニュアル走行モードでは被験者の進みたい方向へアナログスティックを倒していても、AT から身を乗り出して覗き込むように周囲の障害物との距離を確認しながら走行するうちに、指定している方向がずれてしまい、方向の調節を繰り返すという現象も見られた。しかし、補助走行は周囲の障害物との距離を気にする必要がないため、指定する方向がずれることも少ない。さらに、細かい方向の調節を被験者が行う必要がないため、このような回数の差が出たと考えられる。
コース2 では、マニュアル走行モードと補助走行モードを比較すると操作回数に2 倍程度の差が見られた。
このコースではその場回転操作が必要となるため、補助走行モードでコース1 を走行した場合と比較すると、操作回数が多くなっている。そのため、補助走行モードとマニュアル走行モードとを比較するとコース1 の時ほど差が見られなかった。また、コース2 においては被験者がAT の操作に慣れた結果、狭い通路を走行する際の操作回数が減少し、コース1 と同程度の操作回数で移動を行うことができたと考えられる。
これより、補助走行モードとマニュアル走行モードとを比較して、操作回数が少ないことから、搭乗者は煩雑な操作を行うことなく走行することができたと言える。
4.2.3 所要時間について
表に示す所要時間の結果について述べる。被験者4 のようにコース1 の1 回目で補助走行モードよりマニュアル走行モードの方が移動に時間がかかったものも存在するが、他の被験者はマニュアル走行モードの方が速くゴールまで移動することができた。また、マニュアル走行モードでは1 回目より3 回目の方が所要時間が短く、補助走行モードとの差が広がっている。
補助走行モードでは、障害物との距離に応じて一律に速度を決定しているため、狭い通路等を通り抜けるように、障害物との距離が近い状態が続く場合は、常に安全速度まで減速を行うと、かなり低速で走行することとなり、結果的に移動に時間がかかってしまったと考えられる。そのため、搭乗者の指定速度からの減速方法にはさらなる工夫が必要である。また、マニュアル走行モードでは、搭乗者がAT の操作に慣れたことで、所要時間が短縮されたと考えられる。
また、今回の実験では、狭空間の設定として空間の幅をAT の横幅から10cm の余裕を持たせた100cm とした。これにより、操作に慣れた搭乗者は、障害物と衝突する可能性が低くなり、所要時間が短くなった可能性があると考えられる。
しかし、マニュアル走行モードにおいて速く移動を行った被験者は衝突を繰り返しながら走行たため、安全な走行しているとは言えない。つまり、補助走行の有効性を所要時間のみで評価することはできず、他の評価観点と総合して判断する必要がある。
4.2.4 総合評価
今回の実験では、衝突回数、操作回数、所要時間の3 つの観点で評価を行った。安全に走行するということを考慮すると、所要時間が短い方が必ずしも良いとは言えない。一方、補助走行モードではマニュアル走行モードと比較して衝突回数や操作回数が少なかったため、より簡単で安全に走行することができたと言える。
また、マニュアル走行モードにおいて、ほとんどの被験者で実験回数が増えるにつれて衝突回数、操作回数、所要時間の値がそれぞれ減少している。これは、被験者がアナログスティックを用いたAT の操縦に習熟したからであると言える。
一方で、補助走行モードでは同じ被験者において操作回数や所要時間が常に減少しているわけではない。補助走行モードの場合、搭乗者は進みたい方向と速度をアナログスティックを用いて指定するだけで良く、障害物との衝突を避けるための細かい調節はすべてATが自動的に行っている。そのため、何度同じコースを走行しても搭乗者は同じ操作を行い、結果として操作回数や所要時間に変化が見られなかったと考えられる。つまり、被験者は補助走行を習熟する必要がなかったと考えられる。
初めて走行する道や、まだAT の操縦に慣れていない搭乗者は、操作ミスも多く、障害物に衝突する危険性が高いため、補助走行モードは有効であると言える。しかし、ATの操縦に慣れた搭乗者は、操作ミスも少なく安定して走行可能であり、障害物に衝突する危険性が低いため、現状の速度のままでは補助走行モードを常に使用する必要があるとは言えない。しかし、初めて通る道を走行する場合や情報端末に表示される情報を見たい場合など、障害物に衝突する可能性が高い場合には、補助走行モードを利用することでより安全に走行できると考えられる。また、搭乗者の習熟度に応じて速度を変更し、慣れた搭乗者は速く移動させることで、移動速度に関するストレスをあまり感じることなく移動することができると考えられる。
本実験から、補助走行モードで移動を行うことにより、障害物と衝突することなく安全に移動できることが確認された。また、搭乗者が指定する方向を細かく変更することや、周囲の障害物との距離を常に注意することなく走行を行うことができるため、搭乗者が安心して走行することが可能であることが確認された。特に、初めて走行する道においては、狭空間の道幅が把握しにくいため衝突する危険性が高く、本システムが有効であると言える。
次に、今回の実験を通して確認された現状での問題点およびシステムを改善するための課題について述べる。
4.3 システムの改善点
4.3.1 移動速度の向上
マニュアル走行モードで初めて通る道を走行する場合は、周囲の障害物を常に気にしながら走行を行うため、補助走行モードを利用したいと感じる被験者が多いと考えられる。しかし現時点では、初めて走行した場合でも補助走行モードを使用するとマニュアル走行モードより移動速度が遅くなってしまうことがある。これは、障害物との距離のみに基づいて速度を決定していることが原因である。
壁と平行に走行を行う場合など、障害物の形状に沿って移動を行う時は、あまり調節を行わなくても、安全に走行することが可能であるため、速度を上げることが可能であると考えられる。このように、単純な距離だけでなく、障害物の形状や大きさなども考慮した上で速度を決める必要があると考えられる。
4.3.2 回転動作を含む指定方向の調節
実験に使用したAT には、AT の奥行きの方が、AT の横幅より大きいという特徴がある。そのため、車体の向きによっては、空間に侵入できない場合が存在する。これは、AT が走行するのに必要な大きさが最小となる幅で計算しているのではなく、現在走行している向きのままで平行移動を行った場合に必要な幅で計算しているからである。
AT の幅を考慮すると、搭乗者が指定する方向から計算した幅ではそのままでは走行することはできないが、旋回することで走行可能となる場合が存在する。その場合は、旋回を行い、走行可能となる角度まで回転を行う必要がある。車体の形状から、進行方向と前方(または後方) が等しい場合が走行するのに必要な幅が最小となるため、進行方向と前方(または後方) との差分が回転すべき角度となる。回転後に狭空間を走行することを考慮すると、旋回の終了状態での誤差が大きな影響を及ぼす可能性があるため、旋回には高い精度が求められる。そこで、3 軸角度センサとレーザレンジセンサからの全方位の距離情報を利用して回転を行うことで、正確に回転することができると考えられる。その場回転を行うため、全方位の距離情報も回転された値を取得できることから、旋回前に取得した距離情報を回転させ、旋回中に取得した距離情報とマッチングすることで、旋回の終了判定に用いることができると考えられる。また、狭い通路を走行中に車体を回転させる場合は、通路の角度と車体の向きを平行にすることにより、方向を調節することができると考えられる。
5 関連研究
5.1 知的車椅子
高齢化社会の到来によって、今後ますます身体的に障害を持っていたり、身体機能が低下した高齢者が増えて行くと思われる。そこで、より安全で機能性の高い電動車椅子の実現を目指した研究が行われている。
車椅子は、高齢者や足腰に障害を持つ人間にとって、必要不可欠な移動手段となっている。しかしながら、従来の電動車椅子の操作性は、必ずしも直感的ではなく、自分の意図した通りに操作できるまでには多くの時間を要する。例えば、ジョイスティックを用いたインタフェースは、搭乗者の姿勢や車椅子自体の特性などの要因から、搭乗者の意図との間にずれが生じ、危険を伴う可能性がある。
濱上らの知的車椅子では、事前に学習した障害物回避や壁沿い行動による移動時の搭乗者の操作負担の軽減や、他の知的車椅子と協調することによる道路の譲り合いや隊列成型といった協調行動の実現などを目指している。本研究では、事前に学習をさせて回避を行うのではなく、その場でのセンサ情報を頼りに障害物回避を行うことで搭乗者の操作の負担を軽減させている。これにより、学習していない状況では安全に走行できないという問題はなく、さまざまな状況で障害物と衝突することなく走行することができる。
濱上らの研究プロジェクトでは、車椅子を日常的に必要としている人を対象にして、限られたユーザに対しての操作性の向上を目指している。しかしAT では対象とするユーザを限定するのではなく、健常者や障害者という枠を超えて人間の移動および情報処理能力を拡張することを目指している。また、AT は全方位移動が可能であるため、アナログスティックを用いても搭乗者の意図を反映した移動を行うことが可能である。また、車椅子に乗ると目線が下がるため、立って移動を行うよりも周囲の物が速く移動しているように感じたり、圧迫感を感じやすい。しかし、AT では立っている人と同じ目線で移動を行うことができるため、人と同じ感覚で移動することが可能である。
5.2 全方位画像センサを搭載した全方向移動車の障害物回避走行
移動ロボットは、福祉機器や狭い空間における移動装置として活躍が期待されている。そのため、細矢らはメカナムホイールを用いた全方位移動車を開発し、全方位移動の特徴を最大限に活かすために全方位画像センサを搭載し、障害物を回避して走行するロボットを開発した。
スタート点から目標点まで直線で走行する経路を生成し、現在位置から目標点まで直線で走行する経路上に障害物がある場合に、障害物の周囲に設けられた衝突ゾーンに沿って直線で補間しながら移動するものである。これにより、障害物と衝突することなく走行できる最短の経路を走行することができる。しかし、カメラの解像度から検出範囲が1m 程度に制限されており、また、画像処理から経路計算までに時間がかかるため、1 度に移動できる距離が限られている。
AT では、カメラではなくレーザレンジセンサを用いて障害物を検出し、衝突しない方向を決定している。レーザレンジセンサの検出範囲は最大30m と大きいため、障害物と衝突する直前ではなく、事前に回避行動を始めることができる。
5.3 測域センサを用いた移動ロボットの狭空間走行
室内環境には、机や椅子により高さや幅が制限された狭い空間が多く存在する。このような空間でロボットが三次元形状を正確に認識し、安全に走行することができれば、ロボットの活動範囲が飛躍的に広がると考えられる。そこで、石和らは測域センサを用いて障害物を検出し、狭空間を走行する手法を提案している。
まず、ロボットのさまざまな高さにおける外形情報を2 次元空間に分割して表現する。次に、測域センサを用いて前方にある障害物までの距離を先ほど分割した2 次元空間ごとに取得する。そして、ロボットが直進や右旋回、左旋回等のコマンドを入力された場合の位置と姿勢を計算し、障害物までの距離が一番大きくなるコマンドを採用し実際の移動に用いる。この動作を繰り返しながら走行することにより、狭空間で衝突しない移動を行うことができる。
この研究では、走行コマンドが前進と旋回であるため、ロボットの姿勢が大きく変化するような急な角度変化に対応することができない。しかし、AT は360 度全方位に移動することが可能であるため、自身の姿勢を変えることなく急な角度変化に対しても障害物と衝突しない方向へ移動することができる。
5.4 走査型距離センサを用いた移動ロボットの隘路ナビゲーション
屋内でロボットが移動を行う際、隘路(狭い道、狭くて険しい道のこと) では正確かつ迅速に隘路の形状を把握して、衝突しない経路を導出する必要がある。そこで、森らは、屋内において、走査型距離センサによって通路の形状を把握し、それに基づきロボットが壁に衝突しない経路を作成する手法を提案している。
走査型距離センサで障害物までの距離情報を取得できるエリアをブロックに分割し、走査型距離センサが障害物を検知して、同じ方位のその先は通れないところとする部分(閉ブロック) と障害物を検知していない部分(開ブロック) を得る。これを元にロボットの走行可能領域を把握し、走行可能な経路の候補を計算する。走行可能であると判断した経路を仮想走行し、衝突しない走行ルートが得られたら、それを走行可能ルートの一つとみなす。また、逆に衝突した場合は走行経路の一つ手前で同様に仮想走行をする。これらの動作を計算されたすべての経路の候補において行うことにより、最適経路を計算することができる。
この研究では、L 字型のような急な角度変化には対応できず壁に衝突してしまったり、最適な経路が発見できず走行できない場合がある。しかし、AT は360 度全方位に移動することが可能であるため、急な角度変化に対しても壁に衝突することなく移動することができる。
6 まとめと今後の課題
6.1 まとめ
筆者の所属する研究室では、情報処理と通信機能をもつ移動体に人間が搭乗し、情報処理と人間の物理的な行動を連動させる、搭乗型コンピューティングのコンセプトに基づいて個人用知的移動体AT の研究と開発を行っている。AT はレーザレンジセンサと呼ばれる、周囲の物体までの距離を測定できる装置を搭載しており、360 度全方位の障害物までの距離情報を取得することができる。また、駆動輪にメカナムホイールと呼ばれる複合車輪を用いており、全方位移動とその場回転を行うことができる。AT に搭乗してマニュアル走行する場合は、搭乗者が任意の方向へアナログスティックを倒すことによって、指定する方向に指定する速度で走行を行うことができる。
マニュアル走行をする場合、障害物等によって走行の幅を制限された狭空間においては、搭乗者の認識や目測の誤りによって障害物と衝突する可能性が高く、障害物を避けるには複雑で細かい操作が必要となる。そこで本研究では、レーザレンジセンサで取得した全方位の障害物までの距離情報と、搭乗者が指定した速度と方向を元に、障害物に接触することなく移動できる方向と安全に走行できる速度を決定することで、簡単な操作で安全に移動する手法を提案した。
搭乗者の指定する方向に障害物がある場合は、AT が移動可能な空間を見つけ、空間へ移動するための方向を決定する。また、AT と障害物までの距離から安全に走行できる速度を決定する。
ただし、障害物を避けるように移動方向を調節して走行を続けると、本来走っていたコースから大きく逸れてしまう場合や、廊下等で壁沿いを走行していた際に障害物を避けることで廊下の中心へ移動し、そのまま移動を続けることで歩行者などの移動の邪魔となる場合がある。そこで、移動方向と指定方向の差分を記録しながら、移動方向を調節し、障害物の回避後に、再び移動方向を調節することで、障害物の回避前に走行していたコースへ戻ることができる仕組みを実現した。それによって、障害物の回避前後で走るコースが大きく異なってしまうことを防ぐことができる。
本研究で提案した補助走行モードを使用した場合と、通常のマニュアル走行モードを使用した場合とで、安全性や操作の煩雑さに違いがあるか比較実験を行った。その結果、補助走行モードを使用した場合は、搭乗者の操作は簡単で、障害物に衝突することなく移動することが可能であることが確認できた。
また、搭乗者は必要に応じてATを乗り降りする必要があるが、屋内には移動体を長時間停止させる場所がないことも多く、人の邪魔にならないような場所で停止させる必要がある。そこで、あらかじめ停止させたい方向を指定したのち、搭乗者がAT から降りると自動で駐機する場所へ移動する手法を提案した。この手法では、搭乗者の指定した方向にある隅や袋小路を発見し、その方向へ移動を行うことにより、駐機可能な場所へ移動することができる。
6.2 今後の課題
6.2.1 移動障害物の考慮
本研究ではすべての障害物が静止していることを前提としており、障害物が移動している場合の移動速度や移動方向を考慮していない。そのため、障害物がATから遠ざかる方向へ移動しているにも関わらず回避を始めてしまったり、障害物を回避する方向を決定しても、障害物が近づいてきている場合は回避しきれず衝突してしまう可能性がある。
今後は、障害物の移動速度や移動方向を考慮して位置や状態を判断する必要がある。移動障害物の状態を考慮して回避を開始する距離や方向を動的に変更することにより、柔軟な回避動作を行うことができるようになると考えられる。
また、死角から移動体が現れた場合など、センサでは認識できない場合は、認識してから回避を開始しても衝突する危険性が非常に高い。狭空間においては、回避する場所がほとんど存在しないため、認識した場所で回避できずに停止してしまうと、他の移動体が通行できなくなり邪魔になる可能性もある。そこで、周囲の移動体と通信を行い、お互いの位置を把握しておくことで、接近する前に回避動作を開始することができる。また、周囲の移動体の速度も事前に分かれば、同じ道を走行する場合に移動速度の速いものを先に通行させるために交差点で待機するなど、通行する順番を決定することでより効率のよい移動を行うことができる。
6.2.2 地図情報とのマッチング
本研究では、搭乗者が方向を指定して移動を行っているが、入口より出口が狭まっており、AT の大きさでは移動中に通れなくなってしまうような通路でも、入口に走行可能な幅があれば移動するため、途中で移動ができず停止してしまう可能性がある。つまり、障害物を回避する方向は現在取得したレーザレンジセンサの情報を元に決定しているため、障害物や壁の奥の形状など、センサで取得できない場所の状態を把握することができない。
今後は、地図情報を利用して、あらかじめ周囲の狭空間の形状を把握しておくことにより、行き止まりなど通り抜けができない場所は回避して走行することができると考えられる。
第2 章2.5.1 節で説明した自動走行で行われているように、RFID タグを用いて現在位置を推定し、レーザレンジセンサで取得した距離情報と地図情報をマッチングすることにより、センサで取得できない場所の状態も調べることができる。その情報を利用することで、障害物の回避を行った先が袋小路であった場合は、回避を行う方向を調節して、指定方向へ少しでも遠くまで進める方向を選択することが可能となる。また、搭乗者が地図情報を見ながら走行することにより、現在位置から見えない場所も把握することができるため、搭乗者が行きたい方向を適切に指示することができると考えられる。
6.2.3 搭乗者の運転スキルに合わせた調節方法の変更
現在は、搭乗者の運転スキルなどに関係なく一律に速度調節や移動方向調節を行っているため、搭乗者の予想以上に速度が低下してしまう場合や、搭乗者の意図しない方向へ回避をしてしまう場合など、搭乗者が快適に走行することができない場合が存在する。
そこで、搭乗者の運転スキルに応じて、速度や移動方向の調節を行う幅を変更することによって、搭乗者がより快適に移動を行うことができると考えられる。搭乗者の運転スキルが低い場合は、空間の幅などの目測を誤りやすい。そのため、安全性を重視して補助走行モードが方向と速度を比較的大幅に調節しながら走行することにより、搭乗者が安心して走行することができる。運転スキルが高い場合は、搭乗者の操縦だけで走行しても障害物と衝突する可能性が比較的高くないと思われる。そのため、快適性を重視して、補助走行モードが方向や速度をあまり調節することなく走行させることが可能であると考えられる。
また、搭乗者の運転スキルに関わらず、初めて走行する道は比較的衝突する可能性が高いため、運転スキルの高い搭乗者においても、安全性を重視して走行する必要がある。そこで、同じ道を走行した回数に応じて補助走行モードが調節する幅を変更することも考えられる。
6.2.4 障害物の形状の認識
本研究で用いたAT では、センサを地面と平行に走査できるように設置しているため、床面から一定の高さの平面上しか障害物までの距離情報を取得することができない。そのため、センサの高さに届かない小さい障害物や、高さによって形状が異なる障害物については、センサ情報から認識することはできず、測定した障害物との距離をもとに移動を行うと衝突してしまう可能性がある。
そこで、1 平面ではなく、複数の平面の障害物を認識する必要があると考えられる。例えば、レーザレンジセンサを縦に複数個配置することで、障害物との距離を計測する平面の数を増やすことができるため、より適切な方向を選択することができると考えられる。
また、地図データベースに障害物の具体的な形状を記録し、その情報を利用することによって、レーザレンジセンサで取得した障害物の情報だけでは認識できない情報を利用することができ、より安全に回避を行うことができると考えられる。
6.2.5 駐機モードの改良
第3 章3.4 節で述べたように、本研究では、駐機モードの4 つのプロセスのうち駐機プロセスのみを実装した。
今回実現した駐機プロセスでは、駐機モードを起動した場所から移動した距離を考慮していないため、搭乗者が誤って障害物が存在しない方向を指定してしまった場合や駐機できると想定して指定した場所が駐機できず回避してしまった場合などは、隅や袋小路を発見するまで動き続ける。駐機モードを起動する前には搭乗者はある程度駐機する場所付近まで近づいていると考えられるため、起動した場所からかなり遠い位置に駐機するとは考えにくい。このため、起動した場所からある閾値以上に離れる場合は、駐機プロセスを中断し、駐機可能な場所が存在しないと判断して駐機モードが起動された位置に戻る必要があると考えられる。
また、駐機モードでは、搭乗者や他の人が駐機プロセスの終了後にATを操作することを想定しているため、今後は他のプロセスについても実装し、駐機モードの有用性を検証する必要がある。
一時退避プロセスでは、起動する人がどのくらいの広さが必要で、どのくらい長い時間場所を空けておく必要があるかも同時に把握する必要がある。また、一時退避を行っている最中に、邪魔になる場所で停止しないよう、適切な停止場所を見つける必要もある。
帰還プロセスでは、駐機プロセス中の移動履歴を記録しておくだけではなく、レーザレンジセンサの値を用いて環境地図の作成や、地図とのマッチングを行うことで、元の位置に確実に戻ることができると考えられる。また、帰還プロセスを呼び出す端末に測位機能がついている場合は、その機能を利用して搭乗者が待機している位置を把握し、そこを目的地として自動走行を行うことで任意の場所でAT を呼び出すことができるようになると考えられる。
また、他のATが過去にどこに駐機したかという情報を蓄積することで、搭乗者が駐機モードを起動する際に、それまでにATが駐機した場所や、その場所で一時退避を行った情報などを提示し、その情報を参考にして駐機させる方向を指定することで、より人の邪魔になりにくい場所を搭乗者が選択することができると考えられる。
謝辞
本研究を進めるにあたり、指導教員である長尾確教授には、研究に対する心構えなど基本的なことから、ゼミを通しての貴重な御意見、論文執筆に関する御指導等を賜り、大変お世話になりました。心より御礼申し上げます。
大平茂輝助教、研究に関することから技術的なことまで幅広く御指導、御意見を頂き、大変お世話になりました。心より御礼申し上げます。
土田貴裕さん、石戸谷顕太朗さんには、ゼミ等で貴重な御意見を頂き、基礎的な知識を身に付けるにあたり数々のご指導をして頂きました。また、研究室の楽しい雰囲気づくりをして頂きました。ありがとうございました。
AT プロジェクトのメンバーである安田知加さん、森直史さん、井上泰佑さんには、本研究を進めるにあたり絶対不可欠であるAT に関する技術的な御指導や、プログラミングに関する様々なアドバイスを頂くなど、大変お世話になりました。ありがとうございました。
木内啓輔さん、小幡耕大さん、山本圭介さん、笠嶋公一朗さん、清水元規さんには、ゼミ等で貴重なご意見を頂いたことに加え、研究や実装に関することや、研究室生活における様々な面でお世話になりました。ありがとうございました。
長尾研究室秘書の鈴木美苗さんには、学生生活ならびに研究室生活の様々な面でご支援をして頂きました。ありがとうございました。
また、石井健一郎教授、鳥海不二夫助教をはじめ、石井研究室のみなさまには、実験場所として研究室前の廊下の使用を許していただき、ありがとうございました。IB 電子情報館南棟3 階の大西研究室、渡辺研究室のみなさまには、実験場所として共有スペースの使用を許していただき、ありがとうございました。心より御礼申し上げます。
最後に、日々の生活を支えてくださった両親にも最大限の感謝の気持ちをここに表します。ありがとうございました。