
個人用知的移動体における個体間通信とその応用に関する研究
概要
個人用知的移動体AT(Attentive Townvehicle)は,搭乗者である人間や,自分を取り巻く環境に適応し, 個体間通信によって協調的に動作することを目指した移動体である. ATは搭乗型の情報端末でもあり,物理的・情報的環境に作用する. 本研究では,ATの「移動」という物理的な動作に着目し, 移動に伴う環境の変化に合わせた情報処理,特に通信形態の切り替えを行うシステムを構築した.
このシステムは,AT同士の位置関係により2種類の通信方法と通信形態を使い分けることで,目的に適した通信を行う.
通信形態には,情報の集中管理を行う統括サーバを介した間接的な通信と,直接,移動体間で行う通信の2つがあり, また通信方法も,IEEE802.11g規格の無線LANによる通信と,赤外線通信の2つがある.
位置情報はATに搭載されている走行距離計と3軸角度センサを用いて推定する他に,地面に設置されたRFIDタグを用いて取得する. 位置情報は統括サーバに集められ,統括サーバはATに対して付近の他のATの情報を配信する. また統括サーバによって中継された移動体間の間接的通信を介して,あるいはサーバを介さない移動体間の直接的通信によってAT同士で共有される. その際に通信の形態に応じてAT間の位置情報の更新頻度を変化させる.
また,物理的な環境が情報的な環境に影響を与え,それにより情報処理が変化する例として,衝突回避・隊列走行・近接コミュニケーションを挙げ, それらに対しどのように通信形態の切り替えを適用できるか検討を行った.
1 はじめに
「いつでも,どこでも,誰でも」情報ネットワークに接続できるユビキタスネットワーク社会が,そう遠くない未来に実現されるだろう. そのような社会では,情報端末が常に人間の近くに存在する.これは,情報端末が日常生活の中に入り込み,生活の一部になることだと考えられる.
ウェアラブルコンピューティングや,モバイルコンピューティングの分野では,情報端末を身につけたり,常に持ち歩くことによって人間の情報処理能力を拡張する. 我々は情報処理端末を用いることで計算・情報収集能力を向上させてきた.
従来の情報処理は,「いつでも,どこでも」を実現するために,その情報処理端末を取り巻く周囲の物理的な環境の影響を抑えようとしてきた. しかし,人間は物理的な環境の中で生活するため,その活動は物理世界の影響を受ける. したがって,情報処理には物理的な環境の影響を反映させるべきものもある. 人間を取り巻く物理的な環境を情報処理に反映させるものの1つとして,LBA(Location Based Applicaion)が注目されている. しかし多くの場合は,情報処理の結果が直接現実の物理的な世界に影響を与えることはない. 携帯用の情報処理端末は情報的な面での作用を行うにとどまるという問題点がある.
一方,現在我々は様々な種類の移動体を利用して生活している. 移動体は人間の移動能力を拡張する.移動体に搭乗することで人間は単体では持ち得ない移動能力を獲得することができる. 我々は移動体を用いることで移動・運搬能力を向上させてきた.
しかし,本来持ち得ない能力を獲得すると,それに伴う弊害も大きくなるという問題が発生する. 移動能力が拡張されるということは,その分人間に許容できない影響を意図せずに与えてしまう可能性が高くなる.
移動体はこの移動能力の拡大に伴う副作用を抑えなければ危険なものになってしまう. 従来,移動体の害は移動体と非搭乗者(歩行者など)を分離することで抑えてきた. しかし,移動体が日常の一部になり,誰もが簡単に利用でき,生活の中に入り込むためには, 移動体を人から分離するのではなく,移動体が人や環境と協調的に動作できるようにしなければならない.
そこで我々はこの情報処理端末と移動体が持つ問題を組み合わせ,物理的な環境と,情報処理的な環境が相互に作用しあいながら,人に適応するものとして, AT(Attentive Townvehicle)という個人用知的移動体を研究・開発している. ATはMountable Computing (搭乗型コンピューティング)というコンセプトのもと, 搭乗者である人間と,ATや人間の周囲を取り巻く環境に物理的・情報的に適応する. ATでは,物理的な環境に与える作用として移動という動作に着目し,情報処理が物理世界に影響を与える方法として,情報処理端末自体が移動を行う. また移動が与える影響を良いものにするために,移動体が搭乗者の特性や位置情報に基づいた情報処理を行う. この2つを組み合わせることで,人間の能力を拡張し,より協調的に動作可能な移動体を実現する. また,位置情報に基づいて複数のAT間で情報処理を行うLBAは,その位置関係により通信・処理の内容が変化する. そこで,この変化に合わせて個体間の通信の形態・手段を変化させる方法を提案する. LBAの特徴に合わせた通信方式を用いることにより,個体間でより協調的な情報処理を行うことができる. そして,この機能を実現するために,ATにおいて位置情報を収集する方法についても示す.
本論文では,まず2章において移動体と情報処理端末の融合であるATの機能と特徴について述べる. 次に3章において,個人用の移動体を相互に協調的に動作させるために,位置情報を利用して通信形態の使い分けを行う手法を提案する. さらに,4章において,この機能を用いた応用例として,衝突回避・隊列走行・近接コミュニケーションの具体例を用いて, LBAに対しこの機能をどのように適用できるのかを示す. これらの機能は,ATが移動体として協調的に動作する例であり, とくに衝突回避は,移動体には不可欠な機能である. また5章では,他の移動体間通信,移動体制御,および衝突回避の研究例と本研究の関連について述べる.
2 個人用知的移動体AT
2.1 ATのコンセプト
個人用知的移動体AT(Attentive Townvehicle)は,搭乗者である人間や,自分を取り巻く環境に適応し,個体間通信によって協調的に動作可能な個人用の乗り物である. ATは物理世界と情報世界を結びつけるプラットフォームとして開発されている. ATは,人間の移動能力を拡張すると同時に知覚能力も拡張し,より協調的な動作を可能とした移動体である. また,移動体と情報処理端末の融合が可能にする様々な効果についての研究が行われている.
ATは,単なる携帯式のネットワーク端末ではない. 人間がATに乗り込み,情報端末と一体になることで,よりスムーズな情報アクセスが可能になる. また,移動体を情報端末化することで,移動の弊害を抑制するだけでなく,携帯式のネットワーク端末には無い機能の実現を目指している. 我々はこれを,搭乗型(マウンタブル)コンピューティングと呼んでいる.
図に示すように,ATにおける研究領域は多岐に渡っている. これは,人間の行動とATの移動体・情報処理端末としての機能が密接に関係していることを示していると考えられる. 我々の研究では,その中で特に,搭乗者である人間と,環境,そして他のATという要素間でのインタラクションに注目している. 図中の4つの軸の中で,各要素がどのように影響しあうのかについて述べる.
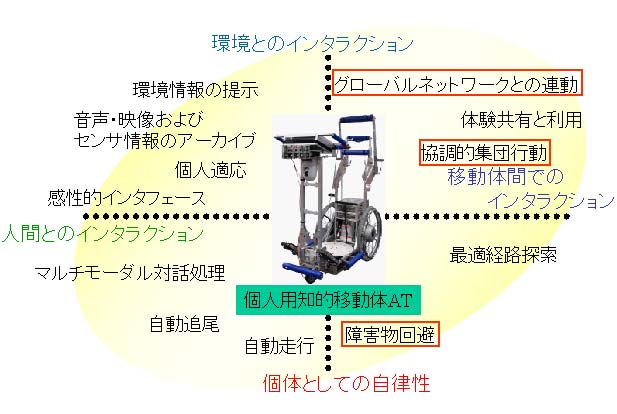
図2.1: ATにおける研究領域
-
環境とのインタラクション
ここでいう環境とは,物理的環境(実世界)と情報的環境(情報世界)の2つの意味を含む. 物理的環境とは人間やATと物理的に作用しあう環境である. 人間が運動によって影響を与えるように,ATもアクチュエータを用いて影響を与える. そして,人間が感覚を用いて物理的環境を認識するように,ATもセンサを用いてこれを認識する. 情報的環境とはATが処理することのできるデータの集合である. ATは情報処理端末でもあるので,センサや通信を利用してデータを獲得し,処理することができる. ATがセンサを用いて物理的環境を認識し,情報的環境に反映させる研究には,赤外線受通信によって実世界の物体を認識し,対象の情報をネットワークから取得しカメラの映像とあわせて表示する研究や, 地面に設置されたRFIDタグを読み取り,そのIDに関連した情報を搭乗者に提示する研究がある. 移動体であり情報端末でもあるATでは,両者が相互に影響を与え合う. これについては章で詳しく述べるが,本研究はこの物理的・情報的な環境と移動体および人間のインタラクションに着目したものである.
-
移動体間でのインタラクション
ここでは,移動体同士を協調的に動作させるだけでなく,搭乗者まで含めてインタラクションをする研究まで,多種の課題が存在する. 移動体間で通信を行い,連携動作や経路追跡を行う研究が行われている. 本研究は,環境とのインタラクションを考慮した移動体間でのインタラクションと言える.
-
人間とのインタラクション
ATにとって人間は搭乗者とそれ以外に分けられる. 搭乗者については,その特性をATが把握し,個人適応するという研究課題がある. その手法としては,移動速度・加速度の制限,より直感的で操縦のしやすいインタフェース,搭乗者の嗜好やその場の状況に応じた情報提示,非搭乗時のインタラクションなどの研究が行われている. 搭乗者以外の人間とのインタラクションについては,行動を体験記録という形で記録し他の人と共有する研究が行われている.
-
人間の生活の一部となり,移動という動作を安全に行うために,状況認識能力を拡張し障害物の回避を行うなど,個体として自律して動作できるようにする研究も行われている. 本研究でも衝突回避において単体として自律した機能を使用している.
個体としての自律性
以上のようにATは,搭乗者である人間と,環境,そして他のATという要素間でのインタラクションを実現することで, 個体として,そして集合として搭乗者である個人と,周囲を取り巻く環境に適応する.
次の節では,ATが搭乗者および周囲の環境とインタラクションを行うために用いる機能という観点からATの構成を説明する.
2.2 ATの構成
2.2.1 形状
まず最初に.ATが移動体としてどのような形状をしたものであるかについて述べる.
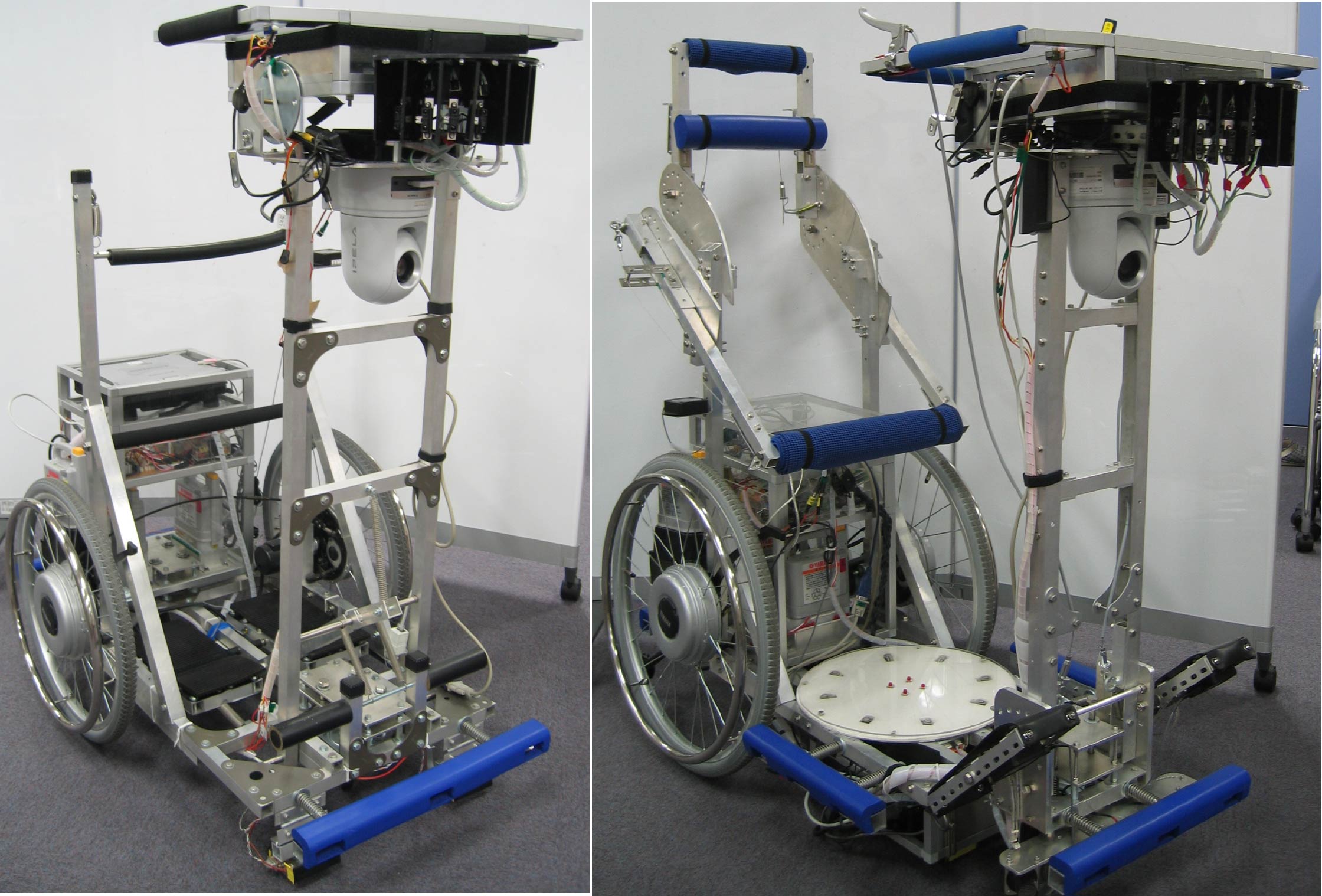
図2.2: 個人用知的移動体AT(左:3号機,右:8号機)
ATの外観を図に示した.写真に写っている2台のATのうち,左側が3号機で,右側が8号機である. 以降,大きさについては比較的大きい8号機の物とする. 後述するが,8号機にはステップホイールと呼ばれる操縦インタフェースを搭載しているため,3号機と一部構成が異なる.しかし,両者の基本機能は同じである. ATは2輪駆動の移動体であり,電動モータによって駆動する2輪の主輪の他に,本体を支える補助輪を持つ. 全幅は0.7m,全長は1.5m,全高は1.6m程度である. この大きさは,一人乗りであることと,屋外だけでなく屋内での使用も想定して一般的な扉やエレベータの入り口を通過することができるという制約を満たすものである. シャーシは平らで,直径0.6m程度の主輪を後部の両側にもつ.補助輪は自由な方向に回転する. これは電動車椅子と同じ構造であり,その場回転という動作が可能なため,非ホロノミックではあるが比較的自由度の高い移動ができるといえる. その前,主輪の前端に挟まれる形で搭乗箇所が設けられている. 3号機は立ち乗りによる操縦のみであるが,8号機では形状を変形させることにより座って操縦することも可能である. 両者とも操縦インタフェースとして2つで1組のペダルをもつ.3号機では搭乗部の床(シャーシ)にあり,立つときにそれぞれの足で踏む. 8号機ではシャーシ前部にあり,座った状態で足を前に出し踏む. シャーシの前部には上下方向に柄があり,その上部にコンソールPCと呼ばれるユーザに情報を提示するためのPCを搭載する.また,後述するPSD-IRアレイやカメラもここに搭載される. この部分は斜めに倒すことができ,搭乗時や立ち乗りと座り乗りの変化に合わせた位置にすることができる. また,シャーシの周囲には距離センサを内蔵したバンパをもつ.
2.2.2 センサ・アクチュエータ
次に,ATに搭載されているセンサおよびアクチュエータについて述べる. ATはセンサ類を用いて周囲の環境を調べ,それを動作に反映させることで個体としての自律性を高め,人および周囲の環境に適応した動作を行うことができる. アクチュエータは電動モータを2つ搭載している.それぞれが別々の車輪を駆動する. これもその場回転という動作を可能にする構造の一つである.
センサは,搭乗者との操縦インタフェースになるものと,周囲の物理的な環境を知るためのものに分けられる. 搭乗者との操縦インタフェースには,ペダルおよびステップホイールがある. 両者とも搭乗者の有無および搭乗者の移動する意思を推定するためのモジュールである. ペダルには圧力センサと傾斜角度センサが搭載されている. ステップホイールには圧力センサが設置されている.
物理的環境を知るためのものには,超音波センサやPSD距離センサ,3軸角度センサ,走行距離計,RFIDタグリーダなどがある. これらのセンサを用いて,ATを取り巻く物理的な環境に関する情報を暗黙的に取得することができる.これは人間の知覚能力を拡張する. また,これらのセンサを用いて取得した情報を動作に反映させることで,搭乗者の負担を軽減したり,協調的に動作することが可能になる. これらのセンサ・デバイスとその目的を表にまとめた.名前の右に(※)がついているものは独自開発した装置である.
これらのセンサ・デバイスのうち,複数の種類のセンサで一つのデバイスとなるものや,我々が独自に開発したデバイスについて,使用されているセンサの種類とその使用目的を示した. またセンサではないが,ATとインタラクションを行うために使用するタグベストについても詳しく述べる.
-
ペダル
ペダルは搭乗者の移動しようとする意図をATに伝えるインタフェースである. ペダルもしくはステップホイールを踏んでいるかどうかでATに搭乗しているかどうかを判断することができる. ペダルを踏んでいるかどうかは,ペダルの踏む部位に取り付けられた圧力センサの示す値によって判断することができる. またペダルの角度により搭乗者の意図する移動速度を知ることができる. ペダルの角度は,傾斜角度センサの示す値によって知ることができる.
-
\label{StepWheel} ステップホイール
ステップホイールもペダルと同様に,搭乗者の移動しようとする意図をATに伝えるインタフェースである. ステップホイールは図に示したように形状は円盤状で,8つの圧力センサをもつ. 搭乗者はこの上に立ち,加重移動を行うことで動作したい方向や加速度をATに入力する. ステップホイールは円盤状の面にかかる圧力の分布を8つの圧力センサで取得し,圧力の程度と重心位置の変化によって搭乗の有無と移動の方向,加速度を決定する. ステップホイールは加重移動という人間の自然な動作を利用する.また厚さも5cm程度と薄く搭乗の際の負担も少ない.
-
PSD-IR アレイ
図に示したPSD-IR アレイは,ATまたはタグベストを着用した人間と赤外線通信を行い,また対象までの距離を計測する. 赤外線送信用LEDと,赤外線受信素子,PSD距離計測センサの3つを1組とし,前方8方向に対し1組ずつ計8個を搭載する. 赤外線受信素子の両側および背面には仕切り板があり,特定の方向の赤外光のみを受信する. 赤外線通信の際の符号化・複合化はPCで用いられるシリアル通信と同じ形式である. 速度は2400bps,データビットは8bit,パリティは奇数パリティを1bit,ストップビットは値1を1bitで,赤外線が送られているときが値0に対応する.
-
搭乗者識別モジュール
搭乗者識別モジュールは,タグベストから赤外線によって送信される搭乗者のIDを受信し,搭乗者を識別する装置である. 図の右下に示した装置がその処理部である. 赤外線受講部はこれとは別に,コンソールPCの手前端に設置されている.
-
タグベスト
図に示したタグベストは,人間が着用するための赤外線通信装置である. ATのコンセプトの1つに,人間との自然なインタラクションがある. しかし,現在の技術では何も装置を持たない人間を識別したり位置を判断することは難しい. そこで,可能な限り人間の負担とならないような方法で,ATが人間を識別することができるための装置としてタグベストを用いる. タグベストは周囲に赤外線LEDと,複数のボタンを持つ. タグベストにはIDが割り当てられていて,赤外線通信によってそのIDを周囲に送る. また,ボタンに割り当てられた命令を送ることができ,ATとの簡単な通信を行うことができる. AT側では,PSD-IR アレイを用いてこのタグベストと通信を行う.
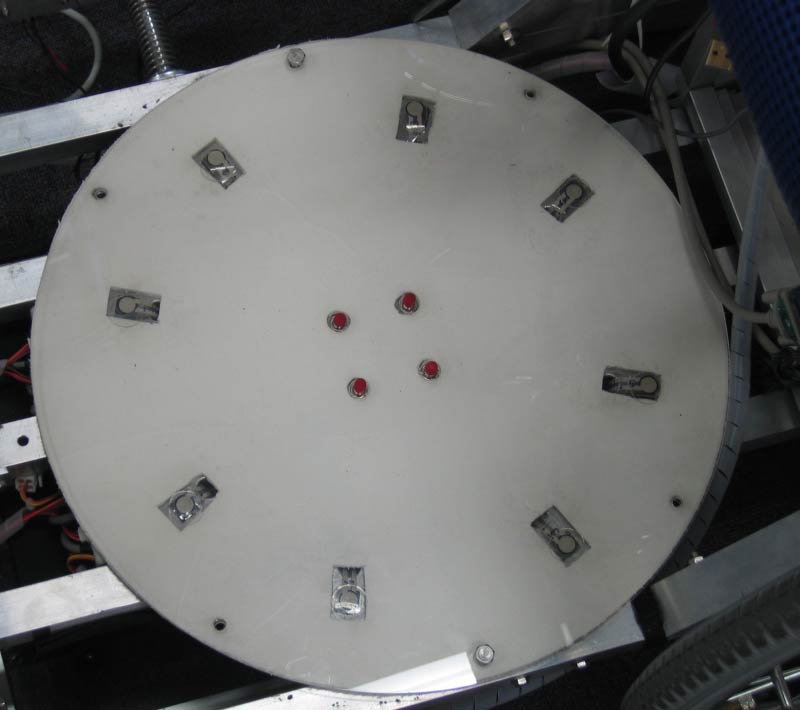
図2.3: ステップホイール

図2.4: PSD-IR アレイ
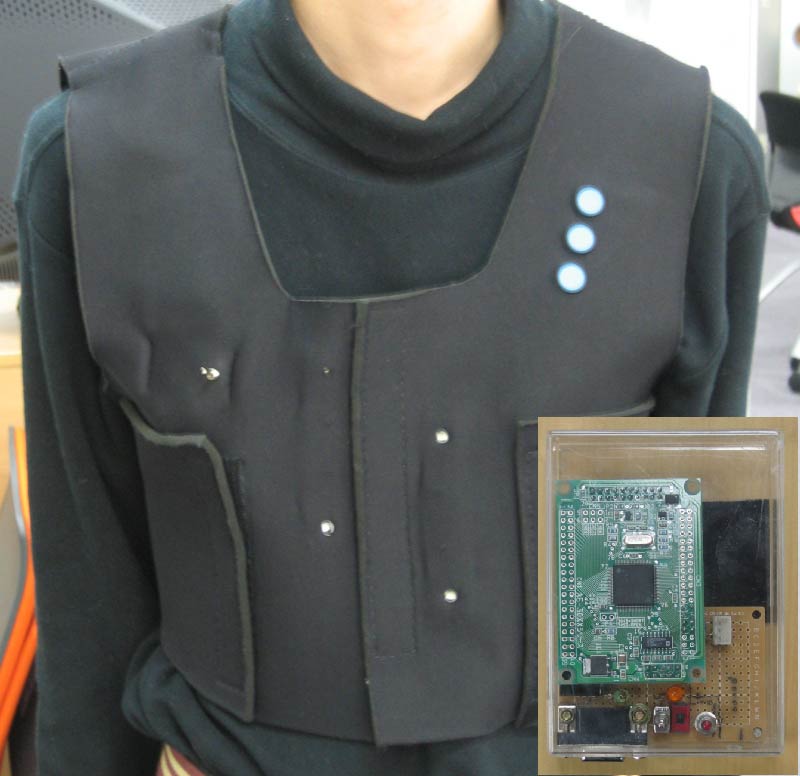
図2.5: タグベストと搭乗者識別モジュール
2.2.3 システム構成
移動体としての機能と,情報処理端末としての機能を持つATは,アクチュエータおよびセンサなどのモジュールの集合として構成されている. ATにはセンサおよびアクチュエータの制御を行うためのモータ制御PCと,通信と搭乗者に対する情報提示を行うためのネットワーク制御・コンソールPCの2台のPCを搭載している. 2台のPCの役割は次の通りである.この2つのPCとセンサ類は図に示した構成で接続されている.
-
モータ制御PC
ペダルやステップホイールなどの操縦インタフェースから取得した情報と,距離計測センサなどから取得した情報に加え, ネットワーク制御・コンソールPCからの制御の指示に基づいてモータの制御を行う. また,センサ情報を統合し,必要に応じてネットワーク制御・コンソールPCに送る.
-
ネットワーク制御・コンソールPC
モータ制御PCから取得した制御情報を,画面に表示したコンソールや音により搭乗者に提示する. また無線LANの機能を搭載し,サーバとの通信やAT間の通信を行う.
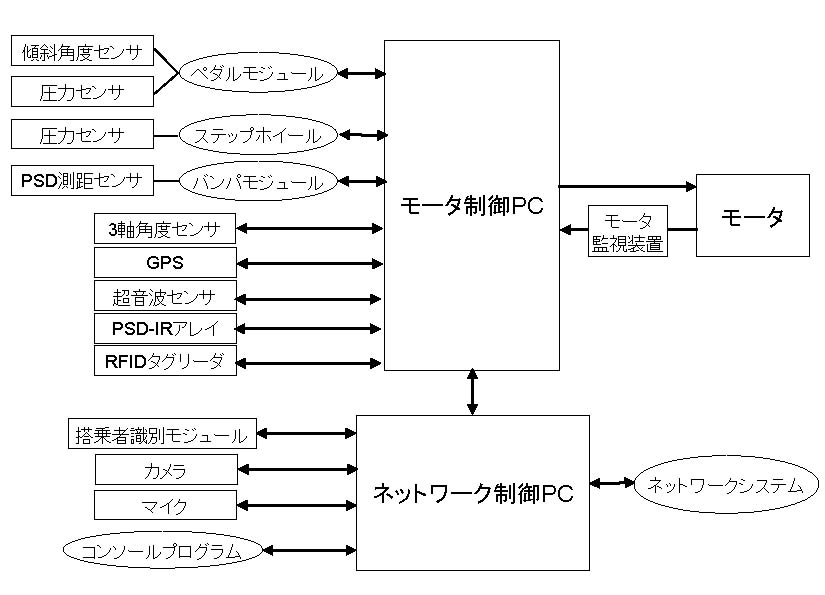
図2.6: システム構成図
2.2.4 ソフトウェア構成
ATは複数のデバイスをPCで管理し,組み合わせて使うことで協調的な動作を実現する.
ATに搭乗する際には,ユーザの認証が行われる.ユーザのIDはタグベストと搭乗者識別モジュールの赤外線通信によって取得する. また,ATに搭乗しているかどうかは,ペダルとステップホイールの圧力センサに体重が加わっているかで判断する. したがって,搭乗者はタグベストを着用してATに乗るだけでユーザ認証を行い,ATにログインすることができる. ATが搭乗者を識別することで,その人に合わせた速度の制限を行うなど,個人に適応した動作をすることができる.
ATはペダルの傾きかステップホイールに加わる圧力を変化させることで走行の制御を行う. ペダルによる操作では,左右のペダルの角度の和を前後方向の速度,差を回転方向の速度とし,初期値からの変化量を用いて計算する. 初期値は左右のペダルの圧力センサに体重が加わったときの角度が設定されるため,搭乗者はただペダルに乗るだけで値の補正ができる. ステップホイールによる操作では,重心位置の変化に対応した動作を行う.これも体重が加わったときに初期値の補正を行う.
ATにログインした状態で搭乗者がATから降りると,ATは自動でヒューマントレースモードになる. このモードでは,ユーザの着用するタグベストとPSD-IR アレイを用いたヒューマントレーサによる自動追尾を行うことができる. これは圧力センサ,赤外線通信,PSDセンサを組み合わせることにより自動で搭乗者の状態に適応する機能である.
2.2.5 通信システム構成
前節までにおいてAT単体の構成について述べた. しかし,ATの研究領域は個体としての自律性を高めることだけではない.移動体間でのインタラクションによっても環境に適応することを目指す. ATに搭載されたネットワーク制御・コンソールPCの無線LANは移動体間のインタラクションを可能にし,複数台で協調的に動作することを可能とする. ATにおけるネットワーク構成を図に示す.
まず,無線LANを用いた通信について説明する. この通信方式では,固定式のアクセスポイントに接続することを想定している. そして,すべてのATは統括サーバと呼ばれるサーバに接続する. 統括サーバはATと1対1で情報提供を行うサービスも存在するが, 本研究ではAT間で情報の共有を行うための中継手段となる. そのため,この統括サーバとの通信をサーバ中継型個体間通信と呼ぶ.
この統括サーバはAT間通信の基盤となり,サーバ・クライアント型のサービスを提供する. すべてのATが統括サーバに接続することによって,遠距離でも互いの存在を把握することができる.
統括サーバが複数のATの情報を集めて処理するのに対し,AT間で直接通信を行う方が都合が良い場合がある. 具体的には衝突回避や隊列走行などであるが,詳しくは章で述べる. そのような場合に,ATは個体間で1対1で通信を行うことができる.
次に,PSD-IR アレイを用いた赤外線通信について説明する. 無線LANを用いた方式では,通信の前にアクセスポイントに接続する必要がある. この方式では,位置にあまり依存しない通信を行うことができるが, 逆にAT同士が極めて接近した状態においても統括サーバによって中継された通信でしか相手と情報の交換を行えない. 一方,PSD-IR アレイを用いた赤外線通信では,IDなどの限られた情報を伝達することしかできず,また通信可能な範囲も狭いが, AT間で,またATと人とで直接情報を送りあうことができる.
本研究は,この通信方式と形態のそれぞれの利点を活かし,情報処理の目的に応じた通信の提供を行う手法について提案する.
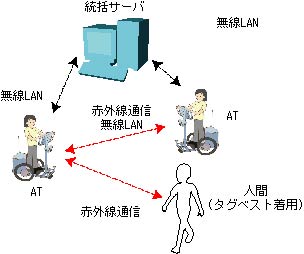
図2.7: ネットワーク構成図
3 ATにおける個体間通信
\label{section3} 本章では,位置情報を利用して通信を使い分ける方法について述べる. そのために,まず ATは物理的な環境と情報的な環境に適応することを述べる.ATは移動体であり,移動と情報処理を結びつけて周囲の環境に適応する. 物理的な位置関係の変化も情報処理に影響を与えるため,処理内容に応じて通信方式・形態を切り替える必要があることを述べる. 次に,ATの通信形態・方法にはそれぞれ2種類あることを述べ,位置情報を用いて通信形態を切り替える方法を示す. 最後に,ATにおいて位置情報を取得する方法を述べる.
3.1 ATを取り巻く環境への適応
\label{adaptation} ATは移動体としての機能と,情報処理端末としての機能を持つ. 移動体としての機能は周囲に物理的な作用をし,情報端末としての機能は,情報的な作用をする. つまり,ATにとって周囲の環境は物理的な環境と情報的な環境に分けられる.
そして,この移動体および情報処理端末という2つの機能を併せ持つATは, その物理的・環境的な両方の環境への作用を相互に影響させあうことでより協調的な動作・情報処理を行うことができる.
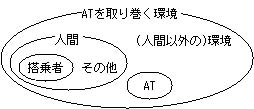
図3.1: ATを取り巻く環境
また,ATを取り巻く環境は,図に示すように人間とそのほかの環境に分けられる. ATは搭乗型の情報端末であるので,人間は搭乗者とそれ以外の人間に分けられる. つまり,ATは搭乗者およびその他の人間と,人間以外の周囲の環境に対し,物理的な面と情報的な面の両方から作用するものである. %変 その作用が互いに影響しあい,搭乗者や他のATとも影響しあうことで,個人および環境に適応し,より協調的に動作することができるようになる. ATが適応する人間・環境という対象と適応する物理的・情報的な側面について,その適応の仕方を表にまとめた. この適応する対象とその物理的・情報的な側面における適応の仕方を順に述べる.
ATの物理的な面での作用は移動体としての機能によるものである.つまりその主な作用は移動である. 個人,特に搭乗者に適応することは,搭乗者の意図した通りに動作するということである. また移動という動作が協調的であるためには,その動作が許容できるものでなければならない. これは,人や物に危害を加えない,危険な動作をしない,迷惑にならないということである. 歩行者の付近で高速に動作すること,他の障害物・ATなどと衝突すること,騒音を出すことなどは防がなければならない.
物理的な環境に対する適応というものは人間の判断によって決まる. 前述の許容できる移動動作というものは環境に対する適応に含まれる.これは,周囲の環境に含まれる物理的な制約を満たす適応である. また,物理的な制約を満たす移動をもたらす方法の一つにナビゲーションがある.
ATの情報的な面での作用は情報処理端末としての機能によるものであり,情報処理である. 搭乗者に適応するということは,その人の特性・嗜好に合わせた情報処理を行うことである. ATは人間の知覚を拡張するため,より多くの情報を収集することができる.例えば,周囲のATを認識して,搭乗者の情報を交換することができる. その中から,搭乗者が必要としている情報のみを,必要なときに提示することが求められる. 人に適応するということは,搭乗車間の関係を情報処理に反映することである. 例えば,近年発達しているSNSなどの仕組みがこれにあたる. 情報的な環境に適応するということは,他の情報端末と連携動作をすることや,その処理する情報の内容に合わせて通信の形態を切り替えることである.
|
|
作用対象 |
||
|
|
個人 (搭乗者・それ以外) |
環境 |
|
|
|
物理的 |
意図した通りに動作 |
安全確保 |
|
作用の |
(移動) |
許容できる動作 |
ナビゲーション |
|
仕方 |
情報的 |
搭乗者の特性に合わせた情報処理 |
他の情報端末との通信 |
|
|
(情報処理) |
他者との関係に合わせた情報処理 |
処理内容に合わせた通信形態 |
ATの作用における物理的な面および情報的な面が相互に影響しあうことは先に述べた. 次節で詳しく述べるが,移動が情報処理に影響を与え,情報処理が移動に影響を与えるということが,これら両者が相互に作用しあうことの表れである. 上の例においても,搭乗者の意図した通りに動くということは,搭乗者の意思という情報的な面が作用するし,許容できる動作ということについても同様である. ナビゲーションも周囲の情報的な環境に合わせて行われるものである. 搭乗者の特性に合わせた情報処理も,その処理過程において物理的な環境の影響を受ける.他人との関係のうちには位置関係などの物理的な関係も含まれる. 通信の処理内容も,後述するように,物理的な環境に影響され変化する. この物理的な環境と情報的な環境が相互に作用しあう効果を次に述べる.
3.2 移動と情報処理
\label{MovementAndInformationProcessing}
3.2.1 情報処理が移動に与える影響
ATにおける情報処理の目的の一つに,移動という行為を最適化することがある. したがって,情報処理が移動に与える効果には,移動という行為の最適化を行うというものが含まれる. 移動の最適化とは,次のことを実行することである.
-
物理的な制約を満たす
ATは移動体として周囲の環境の物理的な制約を受ける. ATの移動能力から,そして協調的な動作を実現するために,ATの動作には物理的な制約が加えられる. 例えばそれは障害物に衝突しないことである.
-
物理的な制約の中で移動コストを最小化する
ATが満たさなければらない制約を持っていることはこの節の始めで述べた. その制約を満たした上で,別の効用を最大化することである. この効用とは,搭乗者が移動を行う目的を達成するために必要なコストを最小にすることである. 例えば,搭乗者がある知らない目的地に移動したい場合には,搭乗者はその方法を探さなければならない. そのためには現在位置と対象の位置の関係を知ることが必要である. もしくはある目的を達成するために施設に移動したいが,その施設が付近にあるのかどうか知らないということがある. これらの場合に,ATが情報処理を行うことでその存在や位置を搭乗者に提示し,探す手間を省くことができる. また時間を節約するために最短時間で移動したいという要求がある場合は,その道筋を検索することで時間を節約することができる.
移動体としての情報端末の最大の特徴は,周囲の環境や搭乗者の意図による制約や効用を自動的に判断し,適応できる点である. 携帯式の端末では位置情報を収集することはできても,それに基づいて移動という行為を直接行うことはできない. ATでは,収集した情報を元に自動で動作することが可能である.衝突回避や隊列走行はその例である.
3.2.2 移動が情報処理に与える影響
情報処理が移動に影響を与えるように,移動も情報処理に影響を与える. その影響は,AT単体に対して与えるものと,複数のATおよび周囲の環境を含めて与えるものがある.
まず,AT単体に与える影響について述べる. 表に,移動によって生じるセンサ類の入出力の変化を示した. ATに搭載されているセンサ類には,周囲の物理的環境を認識するためのものと,搭乗者の意図を認識するためのものに分けられる. 前者は距離計センサなどで,後者は操縦インタフェース,つまりペダル傾斜センサやステップホイールなどである. したがって,移動による影響というのは,搭乗者が移動しようと意思して動作したことによる影響と,ATが移動した結果生じる影響に分けられる. これらの情報はATの制御に使用されるだけでなく,搭乗者に提示する情報を検索する際の条件として暗黙的に使用される.
人間は物理的な環境の中で生活しているため,その活動の基本は物理的な環境の影響を受ける. 会話や団体行動をするときは近くに寄り集まるのが自然である. 遠くにいる人より近くにいる人により多くの注意を向ける. これは,遠くにいる人より近くにいる人のほうが自身に与える影響が大きい可能性が高いためである. それは,人間がおかれている物理的な環境,例えば位置関係や,その相手のもつ物理面での能力を考慮したものであることは明らかである.
従来のネットワークは,この物理的な面での影響を緩和することを可能とした. 従来の情報処理端末は通常物理的な環境の制約を受けることなく通信をすることを目的としている. それは,遠隔で会話することの必要性から生まれたものであるといえる. もちろん,ATの情報処理端末は従来の情報処理端末のように位置に関係なく同等に通信する機能も提供する.
しかし,ATは通常の情報処理端末と異なり,搭乗型の情報処理端末である. その存在の前提には物理的な環境があることである. ATは自身や搭乗者を取り巻く物理的な環境を自動的に判断して,それを情報処理に反映させることができる. その一つに,AT同士の位置関係を考慮した情報処理や,そのための通信方法の切り替えがある. 本論文ではこの位置関係と通信方法の変化に焦点を当て,その特徴に適した通信方法を提案する.
3.3 位置と通信
\label{physicalRelationAndNetwork} AT同士が協調的に動作するために,相互に情報を交換する必要がある. どのATと協調動作するのか,その相手はどのような状況にいるのかを知る必要がある. それは,この場合,互いの存在,位置という情報を交換するとこである.
人間同士の距離が近いほど関係が密になりやすい. それと同様に,AT同士も距離に応じて相互の情報処理の内容が変化する.
例えば位置の情報についても,相互の位置関係によって交換する情報量の密度が変化する. 遠くのATは,物理的に及ぼす影響が少ない. AT移動速度に対して十分に距離が遠ければ,交換する情報は,互いの存在,おおよその位置という情報でよい. ある特定のATに関する情報を集めるより,全体で情報を共有することのほうが重要になる. 一方,近くのAT同士は物理的に影響しあう可能性が高い.また,その搭乗者同士がコミュニケーションを行う可能性が高くなる. したがって,近くのATとは,より密な位置情報を交換する必要がある. また,より多くの情報処理を行う場合には,その情報処理の形態に従って通信の方式や形態を切り替える必要がある.
3.4 ATの通信形態
\label{networktopology} 情報処理の種類とそれに応じた通信の形態について示す.
まず,複数のAT間で情報を共有する際の通信の形態を図に示す. この通信形態をサーバ中継型個体間通信と呼ぶ. 図では,丸印のノードが各ATに該当する. 図中で黒い丸で示されたノードは,複数のATの位置情報を収集し,処理した結果を各ATに配信するサーバである. このノードは通常の情報処理端末でよく,ATである必要はない. この通信形態は,情報を一箇所で集中的に管理し全体で共有できるため,複数のAT間で互いの位置情報を共有するのに適している. そこで,本手法では遠隔のAT間で位置情報を共有する際にこの通信の形態を利用する. この通信形態では大まかな位置の情報のみを交換する. ここで言う大まかとは,位置情報の空間的な解像度が低いということではなく,位置情報の更新頻度が低いということである.
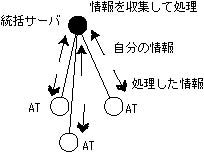
図3.2: 複数AT間での情報交換
次に,2台のAT間で情報を共有する際の通信の形態を図に示す. 図と同様に丸印のノードが各ATに相当する. この図では4台のATが互いに接続しているが,一つ一つの通信は2台のAT間のみで行われていて,そこで処理される情報が他の通信と直接関係することは無い. このようにAT同士が1対1で通信を行う形態を直接個体間通信と呼ぶ. この通信形態は,特定のATとだけ通信を行うため,少数のAT間でのみ情報を共有するのに適している. この通信形態では関係するAT間でのみ情報を交換するため,他のATに影響が及ばない. 通信にかかるコストが大きい場合など,他のATには情報を送りたくない場合に適している. そこで,少数のAT間でより頻度の高い位置情報の交換を行う際にこの通信形態を利用する.
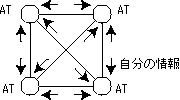
図3.3: 特定AT間での情報交換
図の個体間の通信形態を応用したものとして,図のような通信形態がある. これは,複数のAT同士がすべてつながるのではなく,ある特定の順番にしたがって一列に連なってつながる方法である. これは,隊列走行や道路情報の伝達など, ATが1列に並んで動作する際に先行するATから後方へ順に情報を伝達する場合に適している. この接続形態の問題点は,接続する順番をあらかじめ決めておかなければならないことである.
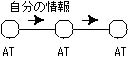
図3.4: 一列のAT間での通信
3.5 ATの通信方法
位置に応じて切り替えるのは通信の接続形態だけではない. 本研究では2種類の通信方法を使い分ける.
一つは,IEEE802.11g規格の無線LANとTCP/IPを使用した通信方式である. この方法では,ATと統括サーバが位置に関係なく通信を行うことができる. 本手法では,複数AT間での位置把握と,個体間,つまりAT同士の通信にこの方法を利用する. TCP/IP接続におけるサーバ・クライアントの関係を切り替えることで通信の形態を切り替える.
もう一つは,PSD-IR アレイを用いた赤外線通信による方式である. PSD-IR アレイでは,赤外線通信が可能な10m以内程度の距離にあるATと通信を行うことができる. そして,相手のIDと方向,距離を知ることができる. この方法は,個体間での通信に利用する.
3.6 通信形態の切り替え
節で述べた2つの通信形態を相互の位置に基づいて使い分ける. ここではその位置情報の交換と通信の切り替えについて述べる.
サーバ中継型個体間通信において位置情報を更新し,付近のATの情報を取得する処理の流れを図に示す. この処理は次のようになる.
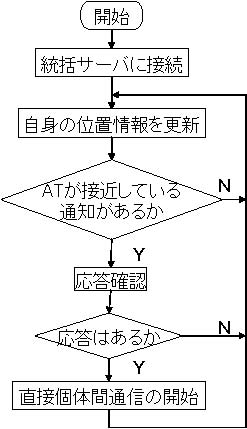
図3.5: サーバ中継型個体間通信を用いた付近のAT情報の取得
-
複数のAT同士がサーバ中継型個体間通信で統括サーバと通信をする
通信にはIEEE80.211gの無線LANとTCP/IPを使用する. この場合,すべてのATが統括サーバのIPアドレスを知っている必要がある. 本手法では,統括サーバはIPアドレスが固定され,事前にそのアドレスが公開されて,ATからの接続を待ち受けているとする. またすべてのATは事前に統括サーバのIPアドレスを知っているとする.
-
統括サーバに自身の情報を送信する
図のように,統括サーバに自身の情報を登録する. 統括サーバに送る情報は,経度,緯度,方位,移動速度,制御状態(操縦されているか待機状態か)である. 統括サーバは,接続を受けたATのIPアドレスに対応させて情報を管理し,どのATがどこにいるかの位置関係を計算する.
-
統括サーバは一定距離内に他のATが接近した場合は,そのATの情報を通知する
図のように,統括サーバは各ATに対して付近のATの情報を通知する. 通知する情報は,各ATが送信する情報に加え,AT同士の距離の情報を含む. 以上の過程を経て各ATが付近にいるATのIPアドレス,距離などの情報を取得することができる. サーバ中継型通信では統括サーバとサーバ・クライアントで通信を行うが,本研究でのその目的はAT間で情報を共有することであり,サーバは中継に過ぎない.
-
AT同士が個体間通信を行う
AT同士の距離が近い場合は相互に物理的な影響を与える可能性が高いので,図のように 直接個体間通信を行いより高頻度で位置情報を交換する.
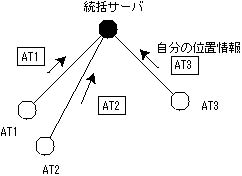
図3.6: ATが統括サーバに自身の位置を登録
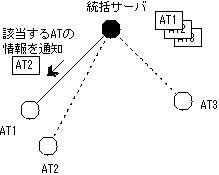
図3.7: 統括サーバがATに付近のATの情報を通知
\label{startDirectConnection} 直接個体間通信もTCP/IPを用いて通信を行う.通信を開始するためには,どちらがサーバになるか決める必要がある. ATの直接個体間通信では,全ての個体が同じように振る舞い,あるATの通信ができなくなった場合に他のATとの通信に影響が出ないようにするため, 全てのATがサーバとして接続を待ち受け,またクライアントとして相手に接続を行う. 双方向に接続を行うことは冗長であるが,AT間の通信が対称的になり,負荷が分散することが期待でき,また,片方の接続が切れても通信を続けられる安定性が得られる. 通信を開始する際には,相手と通信可能か調べる必要がある.応答確認の要求をして,一定時間内に応答が得られたら直接個体間通信を開始する.
また,AT同士が極めて接近した距離にあり,かつ統括サーバを中継した無線通信が 行われていない場合は,直ちに直接個体間通信を開始すべきである. ATに搭載されているPSD-IR アレイは,ATのみによる短距離の直接個体間通信を可能にする.
ATはPSD-IR アレイを用いた赤外線通信により個体間で通信を行うことができる. ATはPSD-IR アレイの赤外線LEDから常時固有のIDを赤外線信号として周囲に出力している. AT同士が極めて接近した距離(10m程度)にいる場合は,この赤外線信号をPSD-IR アレイの赤外線受信モジュールで受信することができる. この赤外線通信により周囲にATが存在するか,また存在する場合はそのおよその方向がわかる. また,極めて近距離である必要があるが,PSD-IR アレイに搭載されたPSDセンサによりその方向の障害物との距離を測定することができる.
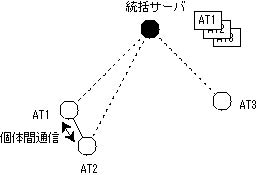
図3.8: AT同士で個体間通信を開始
3.7 位置情報の取得
位置情報は二つの手法を併用して求める. 一つは,地面に埋め込まれたRFIDタグを用いた位置情報の取得であり,もう一つは, ATに搭載された走行距離計および3軸角度センサを用いて推定した位置情報である. 前者はATと環境とのインタラクションにより得られる情報であり,後者はATが個体として独立して持つ機能である.
RFIDタグを利用して得られる位置情報は正確であるが,常にその情報が得られるわけではない. RFIDタグを複数個設置する場合は,その読み取り方式から,ある程度以上の距離を離す必要がある. したがって,その設置場所は,施設の前や通行困難な場所など,正確な位置情報が必要とされるところが優先される. 一方,ATに搭載されたセンサと計算機のみを利用して計算した位置情報は常に利用可能であるが累積誤差を含む. あるタグを読み取ってから次のタグを読み取るまでの位置情報をこの位置推定により補完することにより,連続的な位置情報を取得する.
3軸角度センサと走行距離計を用いた位置の推定は図に示したモジュールで行われる. これは,ATに搭載されたデバイスのうち,位置推定に使用される部分のみを特に詳しく示したものである.
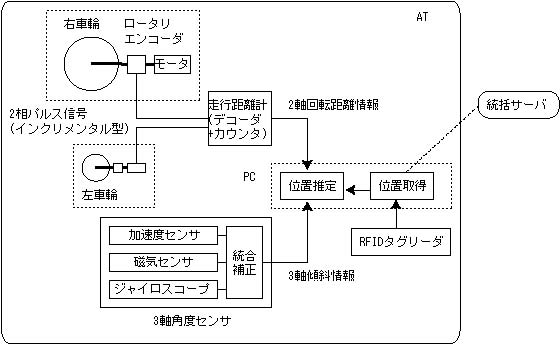
図3.9: 位置推定モジュール部
RFIDタグを用いた情報取得については文献で述べられている. 本研究でも,統括サーバに問い合わせを行うことにより位置の情報を取得する. 統括サーバはRFIDタグのIDとそれに対応する位置情報を管理している. ATがIDタグの上を通過することで取得したIDの値を用いて問い合わせを行うと,ATはそのタグの位置,つまり自身の位置を知ることができる
次に,走行距離計と3軸角度センサを用いた位置の推定手順を示す. 次に示す計算を繰り返すことにより,ATの位置の変化が求まる.
-
微小時間区間におけるATの車体の向きと走行距離を求める
車体の向きは,3軸角度センサの3軸傾斜情報のうちのYaw角の値である. ATの走行距離は,左右の車輪の回転速度の平均として計算する. 車輪の走行距離は,車輪の回転数に,車輪が1回転するときに進む距離を掛けることで求まる. 車輪の回転数は,走行距離計を用いてモータが出力する2相パルス信号を数えることで得られる.
-
ある時点の位置から,車体の向きに走行距離を用いて次の時点の位置を計算する
ある時点の位置から,車体の向きの方向に,走行距離だけ進んだ点が次の時点の位置となる.
4 個体間通信の応用
\label{application} この章では,位置情報を用いた通信の切り替えと個体間通信を応用した例として,衝突回避,隊列走行,近接コミュニケーションを示す. いずれも,ATが周囲の環境に適応し協調的に動作する具体例であり,特に衝突回避は不可欠な機能である.
4.1 衝突回避
\label{collisionAvoidance} 衝突回避は,ATが周囲の物理的な制約を満たすための動作の一つである. ATは衝突回避を実現するために2つの機能を用いる. 一つめは,複数のAT同士が相互に連携し協調的に動作する機能である. 二つめは,ATが単体で独立して環境に協調的に動作する機能である. 本研究では,個体間通信の応用として前者の機能に焦点を当てているが,後者の機能も用いている. まず項で目標とする衝突回避の機能を述べる.次に項で個体間通信の適用法を述べ,項ではATの動作を考慮した衝突の可能性の計算方法を示す. そして項においてこれらを組み合わせた衝突回避のアルゴリズムを提案する.
4.1.1 機能
\label{function} 目標とする衝突回避の機能は,衝突の可能性がある閾値を超えるとユーザに対して通知を行い,回避行動を行うことである. 衝突が予想される場合は,ATは制御の状況に応じて動作を変える. 搭乗者または遠隔操縦者が操縦するATは能動的な回避動作を行い,搭乗者がいないATと障害物および人は受動的な回避動作を行う. 能動的な回避動作は,衝突の可能性を減らすための速度制限と,衝突を防止するための動作停止からなる. さらに,相手がATである場合は衝突の危険性があることを通知する. 両方のATが搭乗者の操縦で動作している場合は,双方の速度が制限され,搭乗者に通知が行われる. 一方のATが動作していない場合は,搭乗者は前進や旋回など回避動作の指示を相手のATに行うことができる. これは,狭い場所などで自分が動作するだけでは回避しきれない状況や,相手が回避動作を行ったほうが良い状況を想定したもので, 相互に協調的に動作できるAT独特の機能である. 受動的な回避動作は,基本的には停止状態の維持であるが, この回避動作の指示を受けた場合は,距離センサの値を調べながら障害物に衝突する可能性が無い限りその動作を行う. 協調性を考えるのであれば,全自動でこの回避動作を行うべきだと考えるかもしれない. しかし,搭乗者の意図に反して移動を行うことや,誰も搭乗していないATが自動で動作することは搭乗者や周囲の人間の意図に反し危険な可能性がある. したがって,誰にとってもそのATが動作することがわかる状況でのみ動作を行うことが望ましいと考えられるため, AT同士が一定距離内に接近した場合に,明示的に指示を行った場合にのみ動作を行う.
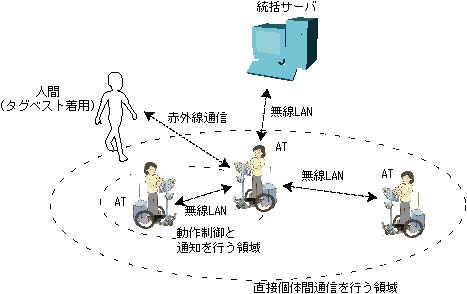
図4.1: 衝突回避機能の概要
4.1.2 個体間通信の適用法
\label{adaptation} AT間の距離が近いほど物理的に与える影響が大きく,また情報的な結びつきが強いことは,衝突回避という面においても成り立つ. 距離が近いほど衝突するまでの時間が短くなり,正確な位置関係を知る必要がある. 逆に,距離が十分に遠い場合,つまり衝突するまでの時間が十分に長い場合は,正確な位置関係を知る必要は無く,ある程度の誤差が許される. また,一度に位置関係を把握することのできるATの数は処理能力の面から限られている. そこで,距離の近いものから優先的に位置情報を交換して衝突の可能性を計算し,回避動作を決定する.
衝突回避では,サーバ中継型個体間通信を相互の位置関係の把握のために利用する. 統括サーバとATとは時間的に低い頻度で通信し,ATのおおよその位置を伝える. AT同士がどのような位置関係にあるかは統括サーバが一括して管理を行う. これは複数台のAT同士が相互に接続しあう通信コストを削減する効果がある.
個体間通信は,距離の近いもの同士が通信をする場合に使用する. 前述のように,衝突するまでの時間が短い場合は,より詳細な位置情報が必要になるため,AT同士が直接通信を行う. 個体間の直接の通信と,サーバ中継型個体間通信を分けることにより, 統括サーバを介した通信を行う頻度をより低くすることができる. ATの詳細な位置や制御情報は,衝突しそうな2台のAT間では非常に重要なものであるが,他のATにとっては通常不要なものである. この情報の交換は直接個体間通信を行うほうが適している. また,赤外線通信によりATまたは人間を発見した場合は,相手が付近に存在するので,速度の制限を行うと同時に,無線LANを用いて統括サーバに相手の情報の問い合わせを行う.
4.1.3 衝突の可能性の計算
\label{calculus} 衝突回避を行うためにはまずATがどのような動作をするのか考えなければならない. ATは生活に密着した移動体であり,より自由に動作できるようにするという目的のため, その場で回転することができ,頻繁に向きを変えことができる. その移動粒度は自動車や二輪車より細かく,電動車椅子と同等程度であることは,構成からも明らかである. したがって,長期的かつ詳細な移動経路の推定は求められず,短期的で幅のある移動経路を推定する必要がある. しかし,車体の大きさと車輪を用いて移動するという方式から,歩行者ほど移動粒度は細かくない. 非ホロノミックな移動を行うため,短期的には移動方向が車体の向きと走行状態(前進か後進か)に依存する. そこで,車体の向きと走行状態,速度に合わせた動作可能領域を計算する.
衝突回避で必要となる情報は,ATの位置(緯度・経度),方向,移動速度,および制御状態(搭乗者による操縦状態であるか否か)である. 個体間通信ではこの情報を相互に交換する. また,衝突の可能性を通知する場合は, 衝突コース,つまり相手のATにどの方向から接近しているのかという情報があることが望ましいと考えられる.
また,位置推定の誤差や,狭い場所において他のATの近くを走行する事を想定すると,位置情報のみを用いて制御を行うのは適していない. 位置情報が衝突回避に果たす役割は,付近にATが存在すること,そしてそのおよその位置を早期に判断し衝突を予防することである. そこで,動作停止はATに搭載された距離センサの計測値により判断する.これはAT単体で動作する機能であり,精度および信頼性が高い. 通信による複数AT間の協調動作はこのセンサ類の計測範囲外を補うものである.
以上から,位置情報による将来位置の計算や衝突可能性の計算は高い精度で行う必要は無い. 直接個体間通信による位置情報の交換頻度に合わせた計算を行うため,ATが特定の時間内に到達できる距離を推定し,円で近似する.この近似した円を到達予想円と呼ぶことにする. 円で近似した理由は計算量を減らすためである.
ATは前進より後進が遅く制限されている.また前進・後退の変化や走行中に旋回を行うのには多少時間がかかる. そこで,ATの動作状態をその速度に応じて停止または微速動作時,前進時,後退時の3種類にわけ,その衝突回避可能性の計算方法を区別する. 到達予想円の前進時の半径を,後退時の半径を
,停止時の半径を
としたものを図に示した. 停止または微速動作時は,旋回動作を行いやすく,全方向に動作できる. そこで,ATの付近一定範囲内に他のATがいる場合には速度を制限するため,ATを中心とした到達予想円を設定する. 前進時は旋回動作による方向転換が制限される.後退を行うかその場で旋回をする際には停止という動作を行う必要がある. そこで前進時はATの前方で接する円を到達予想円とする. 後退時はその逆となる. この方法によって求めた双方のATの到達予想円が重なる場合には,衝突の危険性がある場合とみなす.
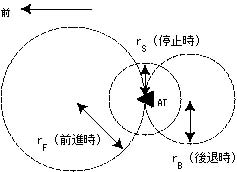
図4.2: 到達予想円
AT3号機の例では,おおよその値であるが最高速度が前進時,後退時
,停止するときの加速度は前進状態からは最大
,後退状態からは
である. 衝突を回避するために行う減速を
とすると,速度
で走行しているときに停止するまでにかかる時間は
であり, その間に走行する距離
は \[ l=v \cdot t = \frac{v^2}{0.3} \] となる.前進で最高速度
のときは,到達予想円の半径は
となる.
4.1.4 アルゴリズム
\label{algorithm} 本手法では衝突回避は3つの処理を同時に行う. 図はそのうちの2つの処理手順をあらわしたフローチャートである. この他に,距離センサの値を監視し続ける処理がある. これは単純に距離センサによって計測した障害物との距離が閾値より近くなったらその方向に動作を行わないようにする.
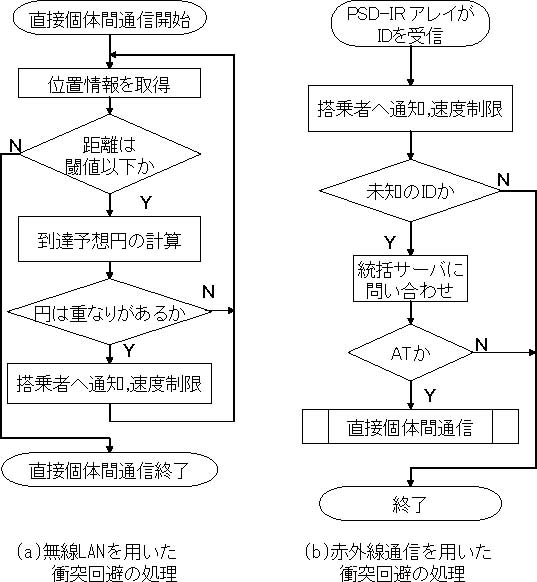
図4.3: 衝突回避アルゴリズム
無線LANによる通信を用いた衝突回避の処理を図中の(a)に示した. この方法では,統括サーバに自身の位置情報を登録し,一定距離内に他のATが接近したときに統括サーバがATに通知を行うことで,近くのATの情報を知ることができる. この通知を受けて衝突回避の処理が始まる. まず節で述べた方法で直接個体間通信を開始し,相手の位置情報を取得する. 得られた情報から双方の到達予想円を計算し,重なりがあるか調べる.もし重なりがあるならば,搭乗者に衝突の危険性を通知して速度の制限を行う. 重なりがなければ,衝突の危険性が無いと判断し,相手の位置情報を更新して処理を繰り返す. また,双方の距離が一定以上になれば,直接個体間通信を行う必要がなくなったとして通信を終了する.
次に,PSD-IR アレイを用いた衝突回避について述べる.これを図中の(b)に示す. PSD-IR アレイが赤外線通信によってIDを受信するということは,付近にATまたは人間が存在するということである. そこでまず衝突の危険性を搭乗者に通知し速度の制限を行う. 受信したIDが未知のものである場合は,無線LANを用いて統括サーバに問い合わせを行い相手の情報を取得する. 相手がATである場合は,無線LANによる通信が可能なので,統括サーバから得た情報を元に直接個体間通信を行う.
以上の3つの処理を同時に行うことで衝突回避の機能を実現するが,処理には優先度がある. 距離センサを用いた計測はAT単体で行うことができるため自律性が高く,また赤外線通信はATまたは人同士が近距離で直接行うことができる. しかし,無線LANによる通信はアクセスポイントを経由することと,比較的多くの計算を行うことから,自律性や応答性が低い. そこで,距離センサの計測値,赤外線通信によるIDの受信,無線LANを用いた位置情報の取得の順に優先して処理を行う.
4.2 隊列走行
2台のATによる連携動作を行う研究はすでにされている. ここでは,隊列動作の特徴を用いた個体間通信の使用法について述べる.
隊列走行では,ATが一列で並んで動作するが,これをそのまま利用し先頭のATが最初で末尾のATが最後という順番を付けることができる. このとき,経路やセンサの情報などは前から順に後ろに,隊列の状態を確認する情報は末尾から先頭へと,列の順番に対応して情報を伝達する通信が発生する. また,隊列を構成するATの全てが互いに通信を行う必要はなく,前後のATとだけ通信を行えばよいと考えられる. そこで,前後一つずつのATのみと個体間通信を行う方法を提案する.
この方法では,先頭のATが動作に関する情報(位置,向き,速度,時刻)を直後のATに送る. 直前のATから情報を受け取ったATは,自身の動作を計算し,それに合わせた情報を直後のATに送る. 例えば,直前のATを最短距離で追跡する場合は,時刻だけでなく位置や向きといった情報が更新される. これを繰り返し,前後のATと通信することで,隊列全ての情報を把握しなくても動作することができると考えられる.
また,AT間の位置関係を基にこの順番を判断し自動で個体間通信を行う方法も考えられる. まず,統括サーバ中継型通信により付近の他のATの位置情報を取得し,自分より後方の一定範囲内にあるATを調べる. 該当するATが存在する場合は,それを自分の直後のATとして直接個体間通信の接続を行い,複数ある場合は,後方に設定したある一点により近いATを選ぶ. 該当するATが無い場合は,自分から一定距離内にあるATのうち,接続を受けていない最も近いATを直後のATとする. そして後ろのATに先頭のATの情報を通知する. これを続けることでつながりを長くすることができる.つながるATの限界は,先頭のATが台数か領域で指定する. このようにして列ができたら,個体間通信を用いて末尾のATが先頭のATに通知を行う. これによって,位置情報に基づいて隊列を構成することができる. しかし,これはすでにATが隊列上に並んでいるときは有効であるが,そうでないときは有効に機能しないであろう.
4.3 近接コミュニケーション
先の2例は,通信を制御に反映させるものである. しかし,近接したAT間で通信を行う場合,その情報処理が目的で,制御を行わない場合もある. それは,例えばATの周囲の物理的な環境を搭乗者に提示するものである. 実世界の対象を認識するものでは,赤外線通信を用いる方法や,RFIDタグを用いる方法がある.
AT同士も赤外線通信で直接個体間通信を行うことができるが,対象を認識するだけでなく対象とインタラクションを行いたい場合は, 赤外線通信より高速で信頼性の高い無線LANを用いるほうが適している. 赤外線通信によって得た情報をもとに,無線LANで対象のアドレスなどの情報を統括サーバに問い合わせる. もちろん,これまでに述べたように,直接個体間通信を開始するきっかけは,統括サーバから取得した位置情報をもとにすることもできる.
直接個体間通信を行うことで,対象とより緊密な連携を行うことができる. 例えば,施設の内部ではその位置に応じた情報を,映像や音声といったデータを含めて取得することが可能になる. それも,一般向けに公開されているような情報だけでなく,伝言板や訪問者用ノートのような,その場所でしかアクセスできない情報を扱うことができるようになる. 対象がATであれば,それはカメラの映像や音声を互いに交換するといった実世界コミュニケーションなど,位置関係に応じたコミュニケーションをより自然に扱うことができるようになる.
友人が近くにいる場合は,自然と挨拶や会話を行う. ATの搭乗者同士も同じで,友人のATが近くにいたら挨拶を送ったり,チャットをするなどのコミュニケーションをしやすい. そこで,搭乗者の友人が近くにいる場合に,自動で直接個体間通信を行い相手の情報を取得して搭乗者に提示する機能が近接コミュニケーションの一部として考えられる.
友人が搭乗しているATが一定範囲内にいるかどうかは,次のようにして判断できる. ATは搭乗者の個人プロファイルを,図に示すようにRSSを拡張した形式で記述したものを保持している. このプロファイル情報は,搭乗者の友人のリストを持っていて,搭乗者のIDがchannel要素内のtitle要素に,友人のリストがitems要素内に記述されている. 統括サーバは接続を受けたATの個人プロファイルを読み管理するため,搭乗者同士の友達関係を把握している. 従って,統括サーバと通信を行っているATの搭乗者は友達かどうか判断できる. 赤外線通信によりIDを受信した場合も,統括サーバに問い合わせることで相手が友達かどうか判断できる.
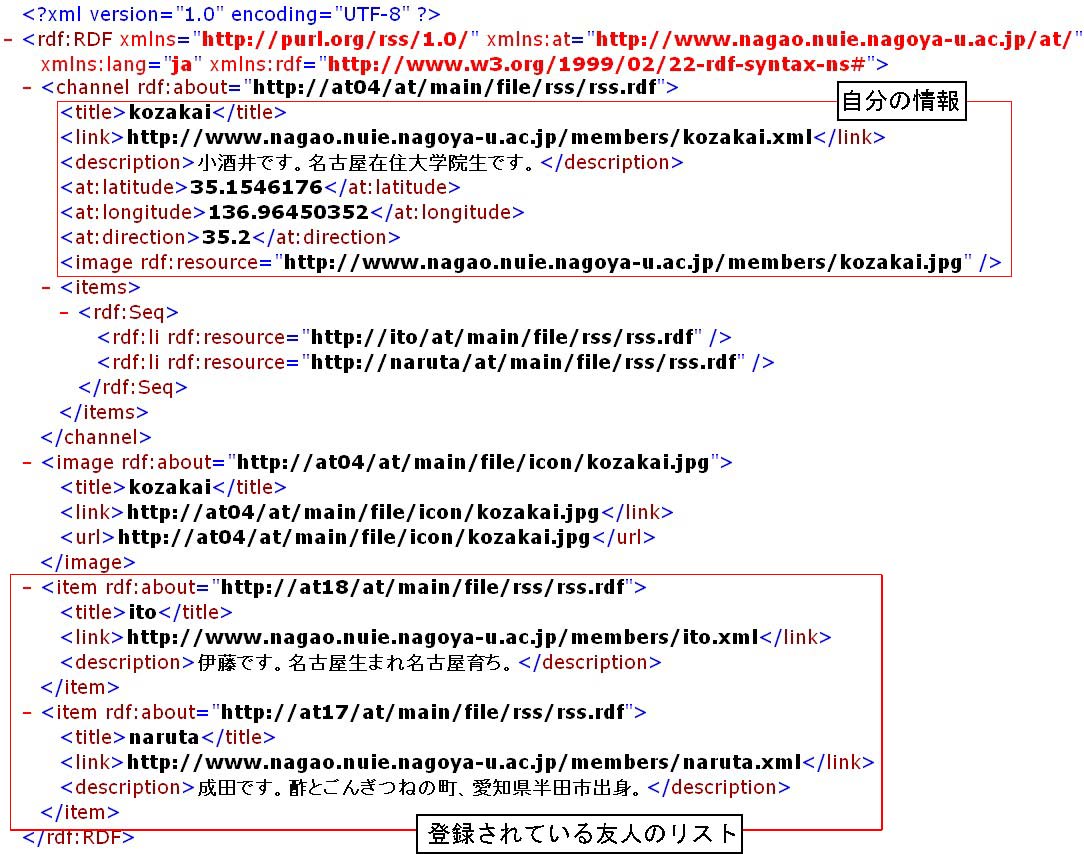
図4.4: 個人プロファイルRSS
5 関連研究
5.1 知的車椅子
移動能力に障害を持つ人間にとって移動体はその能力を補うことができる手段であり,電動車椅子はその代表的なものの1つである. しかし,従来の電動車椅子は,搭乗者の意図に適した動作を行わず事故を起こす危険性が高い. これは搭乗者の意図を的確に伝えることのできるインタフェースが無いことや,車椅子が周囲の物理的な環境を判断して動作することができないなどの問題点によるものである. 例えばジョイスティックを用いたインタフェースは,車椅子の特性などの要因から,搭乗者の意図した動作と実際の動作にずれが生じ,事故を起こす危険性がある. 高齢化社会の到来などもあわせ,より安全に,より自由に動作を行うことができる移動体の開発が望まれている. そこで,より搭乗者の意思や周囲の環境に適応した動作が可能な知的車椅子の研究が行われている.
濱上らの知的車椅子では,障害物回避や壁沿い走行といった操縦の補正と,ドアの通過などの特定の目的に合わせた定型動作を行うことで,操縦者の支援を行う. 12個のPSDセンサを用いることで,障害物との距離を測定し,事前に学習させた行動を元に制御を行う. また,車椅子同士でアドホック通信を行い,道の譲り合いや隊列成型などの協調行動の実現などを目指している.
この濱上らの知的車椅子の研究は,車椅子を日常的に必要としている人を対象とし,動作を支援するものである. しかしATでは対象とするユーザを限定するのではなく,健常者や障害者という枠を超えて人間の移動および情報処理能力を拡張することを目指している. またこの研究では,センサや通信を用いて情報を収集する目的は,動作をより適したものにするために限られている. 本研究におけるATは,収集した情報は動作の制御に用いるだけでなく,位置情報サービスの利用やユーザの行動記録の生成などにも用いられている.
5.2 RCT(Robotic Communication Terminals)
「移動」という行為を人間の生活にとって不可欠なものととらえ,高齢者・障害者を対象に自立的な移動を支援するものとして, RCT(Robotic Communication Terminals)という研究が行われている. RCTでは,移動に必要な認知・駆動・情報入手という能力に障害を持つ人間に,情報処理端末や移動体を組み合わせた支援を行う. RCTの支援システムは次の3つの端末を使用する.
-
環境設置端末
複数箇所に固定して設置される情報処理端末である.周囲の環境の監視し人や車の有無などを判断する. また周囲の情報端末と通信を行い情報入手の補助をする.
-
ユーザ携帯型移動端末
人間が持ち歩く携帯型の情報処理端末で,通信により周囲の情報を収集し,ユーザの状態に合わせて提示する. これは認知および情報入手を支援する.
-
ユーザ搭乗型移動端末
人間が登場して操縦することができる情報処理端末である.認知.情報入手だけでなく,移動という行為を直接的に支援することができる.
RCTでは,高齢者・障害者を対象としている. またその目標を,ユーザの多様性の分類とそれに合わせたハードウェア・ソフトウェアの設計と, 多種の端末間とユーザとの協調システムによる支援システムアーキテクチャの提示, 実世界および情報世界の情報の収集と伝達を行うアプリケーションの作成としている. ユーザ搭乗型端末による移動と,実世界および情報世界の情報の収集,ユーザに合わせた情報の提示は我々のATのコンセプトと似ている. しかし,ATはターゲットとなるユーザを限定することはない. ATは,人間の物理世界における行動と情報を密接に関係付けることにより,人間の活動全般を物理的・情報的に支援する事を目指している.
5.3 ITS(Intelligent Transport Systems)
ITS(高度道路交通システム)とは,情報通信技術を用いて,交通をより安全で効率の良いものにするシステムの総称である. ITSでは,ナビゲーションシステムの高度化,交通関連情報の配信,安全運転支援,交通管理の効率化,歩行者の支援などの実現を目指している. またITSの一部として,情報処理により環境に適応した動作をすることができるIntelligent Vehicle(IV)の研究も行われている.
ITSでは,自動車を対象とした交通システムの研究・開発に主眼をおいている.特に,交通事故や渋滞の防止を目的とした研究が多い. 自動車はATほど粒度は細かくなく,また道路を走行するという制約がある.それに対しATは粒度の細かい移動が可能である. 一方,自動車はATとは比較にならないほど速い速度で移動し,車体も大きい. ITSでは道路という環境や自動車の特性に合わせた研究が多く,これらの中にはそのままではATには適応できない研究もある. しかし,移動体として実現しようとしている機能は共通するものが多い.
例えば,IVにおける衝突回避ではCMOS/CCD(Complementary Metal-Oxide Semiconductor / Charge-Coupled Device)カメラや FMCW(Frequency Moduled Continuous Wave) radar,LiDARs(light-detection and ranging devices)を 用いた手法が多い.可視光から赤外光までの映像を利用した歩行者検出は全天候,特に夜間での視覚能力を向上させる. また,車体の死角となる場所の映像を提示する手法は,安全な操作を行ううえで不可欠である. しかし,これらは自動車が高速で動作するため障害物を早期に発見しなければいけないことや,車体が大きく死角が多いなど自動車の特性による問題を解決するもので,そのままATに適用することはできない. ATでは人間は接近したときにそれが誰であるか,どの方向にどの程度離れているかがわかればよく,カメラの映像は人間の行動を記録したり,映像を交換してコミュニケーションをするために使用している. またITSでは,交差点において発生する複雑な自動車の動作に起因する事故を防ぐために,路車間通信による接近車両の通知や連携動作の研究が行われているが, ATは必ずしも道路を走るわけではなく,歩行者のように移動するので,交差点における衝突は特殊な事例になる. しかし,環境設置型端末との通信による情報収集および協調動作という点ではATにも適応可能である. 同様にATでの走行には車両通行帯という概念がないが,細い道や端の付近を走行するときは地形に合わせた動作をすべきである.
ITSとATにおいて特に注目しているのは,移動体間,そして移動体と環境設置端末間での通信による協調的な動作である. ITSでは車車間,路車間でアドホックネットワークを形成し,信頼性が高く速度の速い通信を行う基盤技術についての研究が数多くなされている. これらはATにも適用可能である. これに対し,ATは移動体における無線通信を利用した応用技術に関する研究である. 本研究では,通信方法として無線LANと赤外線通信を切り替えているが,これは無線LANおよび赤外線通信の基盤技術に関する研究ではない. 個人用の,それも日常生活の一部として人と協調的に動作する移動体における情報処理の応用技術として提案するものである.
5.4 衝突回避機能付全方向移動型パワーアシストカート
人間が操作する移動体が自律移動を行う場合は,操縦者の意図に合った動作をしなければならない. 移動体が大きいほど,また移動速度が速いほど,意図に反する動作は操縦者に恐怖感を与える. また操縦者の予期しない動作を行うことは安全性を損なう可能性が高い. 人が動かす大型の移動体について,障害物との衝突を回避し,かつ操作者に恐怖感を与えることなく動作支援を行う研究がされている. 藤原らは最大700kgの配膳車を元に,4輪をモータで駆動しホロノミックに動作可能なパワーアシストカートを開発した. しかし,動作の自由度が増え操作が楽になる一方で,壁との接触事故の危険性が増大した. そこで藤原らは,超音波センサを用いて障害物を検出し,操縦者に恐怖感を与えない衝突回避を実現している. この手法の特徴を次に述べる.
-
直方体上のカートの4隅に2つずつ超音波センサを配置し,センサの計測範囲外の障害物との距離は移動履歴を元に推定する. これは主に壁などの移動しない障害物との衝突を回避することを目的とした手法である.
8個の超音波センサを使用し,移動履歴を元に障害物の位置を推定する
-
操作者の操作法を検出し動作の自由度を制限する
パワーアシストカートは全方向にホロノミックに動作可能であるが,その特性が操作者の意図に合ったものであるとは限らない. 操作者はカートについた持ち手を押すか引くかして動作させる.このとき,自然と引く場合は片手で,押すときは両手で操作する. 片手引きのときは横に動くと操縦者の意思に反した動作となり壁に衝突する危険性が高い. そこで,持ち手部に光電センサを3つ設置して操作状態を検出し,移動の自由度を制限する. これは操縦者の意図に合わせて動作を自然に変化させることを目的としたものであり,また,カートの操縦方法の特徴を生かした手法である.
-
2自由度動作(片手引き操縦)の時に,障害物との位置関係にあわせて旋回中心の位置を変化させる
周囲の環境に応じて旋回中心を変化させるが,動作自体は操縦者の引く力を補うにとどまるという限定的な動作を行うことにより, 操縦者の意図に適応した自然な衝突回避動作を実現する. また,旋回中心の変化が減速につながり,操縦者に衝突の危険性を通知することができる. これは移動体が搭乗型ではなく,人が外部から力を加えて動作をするという特徴を生かした衝突回避の手法である.
ATにおいても,超音波センサやPSDセンサを用いた障害物検出を行うことができる. しかしそれだけではなく,ATは複数台が通信を行うことにより協調的に動作することができる. 本研究でも,AT同士の協調動作を主眼としたものである. また,操縦者の自然な動作に合わせる例としては,ペダル圧力センサやステップホイールにより操縦者が搭乗しているかどうかを判断し, 搭乗時と非搭乗時を自動的に判断することができる. また赤外線通信を用いることで非搭乗時も動作者を追跡し続け,搭乗時・非搭乗時のインタラクションを自動的に切り替えることができる. 本研究では,搭乗者の有無に合わせてAT同士で行う動作が変化する.
6 おわりに
6.1 まとめ
ATは,移動体と情報処理端末を組み合わせ,人間が乗り込むことでよりスムーズな情報アクセスが可能になるという搭乗型(マウンタブル)コンピューティングというコンセプトに基づいた, 物理世界と情報世界の相互作用による協調的な動作を実現するプラットフォームである. 本研究では,物理世界と情報世界の相互作用として,位置関係に応じた情報処理の変化に着目し,位置情報にあわせた通信方法・形態を切り替える手法を提案した.
通信方法は赤外線通信と無線LANによる通信を用いた.赤外線通信はAT同士またはATと人で直接通信を行うことができ,即応性を期待できるが, 通信の信頼性が低く情報量の多い通信には不向きであり,また遠距離では通信を行えない. それに対し,無線LANを用いた通信では多くの情報処理が伴うため即応性は劣るが大量の情報を交換することができ,遠距離での通信も可能である. この両者を使い分けることで,短距離では即応性があり,かつ遠距離や大量の情報交換が可能な通信を行うことができる.
また,通信形態は統括サーバ中継型個体間通信と直接個体間通信を用いた.サーバ中継型個体間通信は付近のATと情報を共有するのに適し, 直接個体間通信は特定のATと情報交換を行うのに適している. これらを使い分けることで,位置関係に合わせた情報処理を行うことができる.
また,位置情報に依存したアプリケーションの例として衝突回避,隊列走行,近接コミュニケーションの具体例を用い,これらに対してどのように本手法が適用できるのかを示した. AT同士が位置情報を交換し合い,互いの位置関係に応じた情報処理を行うことで,単独の処理では実現することの困難な協調的な動作を行うことができる. また複数の通信手段を組み合わせることで,即応性があるだけでなく,大量の情報交換を必要とする処理を行うことができる.
6.2 今後の課題
6.2.1 通信形態の階層化
本手法では,複数台のATで情報を共有する場合はサーバ中継型個体間通信,特定のAT間で情報を交換する場合は直接個体間通信と通信の形態を2種類に分けた. そしてサーバ中継型個体間通信では,全てのATが統括サーバと直接通信を行うとした. しかし多数のAT間による広域での動作を考えるならば,統括サーバが親でATが子という深さ1の木構造ではなく, 統括サーバの役目をする親ノードを作り出しながらより深い木構造を作り,階層ごとに処理を行うことが求められる. 通信形態の木の深さを深くし,中継を行うサーバのノードを必要に応じて割り当てていくことで, 根にあたる統括サーバにかかる負担を減らすことができると考えられる. 複数台のATで情報を共有する場合には,位置関係によって集団の中に偏りが生じ,結びつきの強い集団がいくつか現れる. 例えば,隊列走行をしているAT同士は他のATよりも結びつきが強いといえる. 隊列走行をしている集団が3つあるときは,全体の中に結びつきの強い集団が3つできることになる. その集団ごとに統括サーバの役割をするノードを一つ割り当て,より小さな集団やATを子として持ち,そのノードはさらに大きな集団や統括サーバの子ノードとなる木構造を作ることで, 全体の中にさらに集団がある状態に対応することができる. このような木構造は複数の統括サーバを連携させるときにも発生する. この木構造を自動的に生成し,中継サーバをATや他の情報処理端末に割り当てることや,中継サーバ同士の情報交換を行う方法などを考える必要がある.
6.2.2 搭乗者適応
ATの特徴の一つに,搭乗者に適応することがある. 衝突回避や個体間通信においても搭乗者に適応して処理を改善することが可能である. 衝突回避では,どの程度接近したら速度の制限を行うか,どこまで速度を制限するかを搭乗者に合わせて変化させることでより良い動作の制限ができると考えられる. また,搭乗者による操縦が困難な場合には自動で障害物を避けて進むなどの機能も必要とされる.
6.2.3 回避対象適応
本手法では,回避対象をATと人間にしたが,回避動作については分類をしていない. より協調的な動作を行うためには,ATと比較して弱者となる人間や,操縦が得意でない人間が乗るATを回避する際はゆっくり動作するほうが望ましい. 赤外線通信によってIDを受信した後に統括サーバに相手の情報を問い合わせたり,サーバ中継型個体間通信によって統括サーバから通知を受けたときに, ATについての情報だけでなく,行動能力や操縦の熟練度など人間に関する情報も通知し, 動作速度の制限を調整することでより安全性が向上すると考えられる. また狭い道でのすれ違いなどでは,互いの熟練度を交換してどちらが道を譲るかの判断の助けとなることが考えられる.
6.2.4 地図作成
位置情報を利用した通信と情報処理を行うのあれば,ATのセンサが観測した特徴的な現象を位置情報と対応付けて収集し,地図を作成して共有することで より高度なAT間での協調動作を行うことができる. 例えば,距離計測センサの計測値を収集すると走行可能な場所を表す地図を作成することができる. これはサーバ中継型個体間通信によるセンサ情報の共有と言える. これに対して,例えば隊列走行中に先頭のATが観測した障害物を順次後ろのATに伝えることも,一時的に地図を作成していることになる. これは直接個体間通信によるセンサ情報の共有といえる. どちらの方式をとるにしても,複数台のATが個体間通信によりセンサ情報を共有することでより環境に適応することができる. これは距離計測センサなど制御に用いられるセンサの情報に限定されない.カメラで撮影した映像を集めることで,場所の検索やナビゲーションを行う際の案内映像とすることもできる. 位置情報に合わせてセンサ情報を記録し,検索する仕組みと,それを制御や情報処理に利用することがATの動作をより協調的なものにすると考えられる.
謝辞
本研究を進めるにあたり,指導教官である長尾確教授,大平茂輝助手には,研究の基礎的な考え方から論文指導などさまざまな面でお世話になりました. またゼミ等におきましても貴重なご意見を数多く賜りました.心より御礼申し上げます.
長尾研究室メンバーの友部博教さんには,研究に関する多くの有用なアドバイスを頂き,また研究室の楽しい雰囲気を作って頂きました. 梶克彦さんには,プログラミングに関する指導をしていただきました. 山本大介さんには,研究活動にとどまらず様々な場面で協力して頂きました. ここに御礼申し上げます.
小酒井一稔さん,土田貴裕さんには研究だけでなく生活面においても相談に乗っていただきました.ありがとうございました.
三木まどかさん, 佐橋典幸さん,成田一生さんには研究室生活の様々な場面において協力して頂きました.ありがとうございました.
長尾研究室OBである鬼頭信貴さんには,ハードウェアの設計や実装に関するノウハウなど様々な御助力を頂きました.ありがとうございました.
長尾研究室秘書の金子幸子さんには,研究活動の様々な面でサポートをしていただきました.ありがとうございました.