
動的環境における個人用知的移動体の自動走行の効率化に関する研究
概要
一般に,移動体に搭載されているセンサのみでは,時々刻々と変化するような動的環境を正確に把握することはできない.そのため,移動体が環境中を自動走行する際に非効率的な動きをする場合がある.例えば,移動体に搭載されているセンサのみでは,これから走行する予定の通路が空いているか,塞がっているかということを知ることができない.通路上に人が密集していたり,一時的に荷物が積まれているなどして移動体が走行できない状態になっていた場合,その場に到着してから経路を修正する必要がある.そのような場合には,移動の効率が悪くなる.この問題を解決するためには,移動体に搭載されているセンサ以外のセンサを使用し,そのセンサで収集した情報に基づいて,移動体がこれから走行する予定の経路の状態をできるだけ早めに把握する必要がある.
本研究では,筆者が所属する研究室で研究・開発されているAT と呼ばれる個人用知的移動体の自動走行を,動的環境において,より効率化することを目指す.AT は搭乗者である人間やAT 自身を取り巻く環境に適応することで搭乗者を支援する,全方位移動,自動走行可能な個人用の乗り物である.また,AT は建物内に存在するサーバと通信することにより,環境の情報や,走行経路を取得することができる.
また,環境情報を知るための新しい手段として,小型無人移動体(SUV: SmallUnmanned Vehicle) を開発した.これは,環境情報を取得するためのセンサが搭載された,自律走行が可能な小型の移動体である.SUV を複数台環境に導入することにより,AT のみの場合に比べて環境の変化を知る機会が増加するため,サーバはリアルタイム性の高い環境情報を取得することが可能である.サーバがリアルタイム性の高い環境情報を取得することにより,自動走行中のAT に対して適切な行動を行わせることが可能となる.
これによって,AT の自動走行中に,SUV がAT の走行予定の経路上に障害物を発見すると,AT はその場所に到達する前に動的に経路を変更することが可能となり,自動走行の効率性が向上する.
提案手法の有効性を確認するために,シミュレータを開発して,SUV を導入することによるAT の自動走行の効率性の変化を調べる実験を行った.その結果,SUVが存在せず,AT のみで走行した場合よりも,SUV を環境中に導入した場合の方がAT の自動走行の効率性が高いという結果が得られた.この結果から,提案手法の有効性を確認することができた.
1 はじめに
近年,ハンディキャップを持つ人を含む一般の個人の移動を支援する,パーソナルモビリティの必要性が高まっている.
パーソナルモビリティとは,一人当たりの移動にかかるエネルギーの消費量の抑制を意図して開発されている電動の個人用の移動体の総称である.パーソナルモビリティの例として,セグウェイ(http://www.segway.com/)や,トヨタ自動車の i-unit(http://www2.toyota.co.jp/jp/tech/p\_mobility/i-unit/),本田技研工業の U3-X(http://www.honda.co.jp/ASIMO/new-tech/u3x/) 等が挙げられる.
パーソナルモビリティは情報処理の機能を有しているため,自転車やバイクとは異なり,搭乗者に適応し,安全に自動走行可能であることが望まれる.しかし,パーソナルモビリティには,安全性や効率性に関してさらなる機能向上の余地がある.そこで,パーソナルモビリティに個人用知的移動体の技術を導入することで機能を向上させることができる.個人用知的移動体とは,歩行者との衝突を回避するような知的移動体と,電動車椅子やバイクのような個人移動体の両方の性質をもつ乗り物のことであり,搭乗者や自身を取り巻く環境に適応することで,搭乗者の行動を支援することができる.
さらには,他の移動体と通信を行い,動作の連携や協調的な行動をとることによって搭乗者により良いサービスを提供することができる.例えば,ある移動体のセンサが取得した地形情報を他の移動体に転送することによってその場にいない移動体が遠隔地の状況を把握し,それを考慮して行動を変更することができる.また,他の移動体と接近した際に情報的なやりとりを行えるならば,互いに進行方向を伝え合い,それに合わせた動作をとることで,衝突等の危険を回避することができる.このように,他の移動体と通信をせずに走行するよりも遥かに安全で効率的に走行することができる.また,互いに協力して 1 つの目的を達成するだけでなく,他の移動体のことも考え,協調的に行動することも必要である.例えば,交差点における分散協調においては,自分だけが速く交差点に進入することを考えるのではなく,相手の方が少し早く交差点に進入することを予測した場合には,こちらは少し速度を落とす,もしくは一時停止した後に交差点に進入するというような行動をとって全体として最適な行動をとる.このように,移動体同士が連携・協調をすることによって,個々の動きの最適化だけではなく,全体としての最適化を行うことができる.
筆者が所属する研究室では,個人用知的移動体の具体例として,AT(Attentive Townvehicle) と呼ばれる移動体の研究・開発を行っている.
AT は,搭乗者である人間や AT 自身を取り巻く環境に適応することで搭乗者を支援する,全方位移動・自動走行可能な個人用の乗り物である.ATに人が搭乗して移動することによって,搭乗者の嗜好や操縦履歴などの情報がATに蓄積される.そして,その情報をもとにATは搭乗者に合った速度で走行したり,搭乗者の興味のある情報を提示したりするなど,搭乗者にとってATを使いやすくカスタマイズすることができる.
次にATの物理的な特性について述べる.AT は駆動系にメカナムホイールと呼ばれる特殊な車輪を用いて全方位移動とその場回転を実現している。これにより,AT は自動車や自転車など一般的な乗り物とは異なり,いつでも好きな向きに旋回し,どの方向にも移動することが可能になった.それにより,自動車や自転車など一般的な乗り物よりも人間により近い動きをさせることができるようになった.我々の考える搭乗型コンピューティングでは,ユーザの直感に合った移動をするだけでなく,ユーザの直感に合った操作・操縦も目指している.それゆえ,操縦インタフェースは可能な限り操作が簡単になるように,我々に比較的馴染みやすく,操作するために特別なスキルを必要としないゲーム機のコントローラを利用している.また,情報の提示や各種設定,情報へのアクセス等にはタッチパネルディスプレイを利用しているため,簡単に目的地の設定や検索を行うことができる.
これまでの AT に関する研究として,AT 同士を通信させ,互いの位置情報を利用した協調動作や衝突回避等を行う,AT の個体間通信に関する研究や,走行履歴を体験コンテンツとして蓄積し,その情報を見返したり,他のATと共有してそのATの走行に利用したりする,体験コンテンツの共有・再利用に関する研究 がなされてきた.走行履歴を蓄積することにより,搭乗者に対して適切な情報提示を行えるようになるだけではなく,その情報を配信することによって他の AT がその情報を取得できるようになり,行ったことのない場所でも適切な情報提示が行えるようになったり,体験共有をすることで他人とより緊密なコミュニケーションをとることができるようになる.
他にも,AT の自動走行の基礎となる屋内自動トランスポーテーション(Indoor Automatic Transportation)という仕組みも研究されてきた.屋内自動トランスポーテーションとは,AT が地図情報から目的地と現在位置を把握し,その間を結ぶ適切な経路を見つけ出し,目的地まで自動走行する仕組みである.自動走行中,進路上の障害物や接近する移動体や人間などを自動で回避することができるので,搭乗者は目的地を指定するだけであとは何もしなくても迷わず安全に目的地まで到達することができる.ATの位置の確認は,環境に設置されているRFID タグを読み取り,環境情報サーバと呼ばれる,建物内の情報を提供するサーバに問い合わせることで行われている.そのため,床や天井に移動を補助するレールなどを設置することなく,搭乗者や周囲の状況に柔軟に対応する自動走行を実現することができる.AT はレールなどを設置しなくても自由に走行できるため,エレベーターや動く歩道のように設置場所が限られ,入口と出口が決まっているようなものよりも柔軟性があり,常時環境情報サーバにアクセスして自身の位置を自動で把握できるため,ショッピングセンターのフロアマップのように目的地を確認するために地図の置いてある場所まで移動しなくても良い.
屋内自動トランスポーテーションの流れは,次のようになる.まず搭乗者がキーワード検索や位置検索などにより目的地を設定する.すると,AT は壁に接近して近くに設置されている RFID を読みとり,環境情報サーバに位置情報を送信する.次に環境情報サーバがその場所から目的地まで最短距離で到達するような経路を計算して AT に返す.そして,経路が決定したら出発し,壁に設置してある RFID タグを読み取りながら用意された経路を進行する.目的地のタグを読み取るまで壁沿い走行,交差点の右左折や直進,突き当りでの右左折などの動作を繰り返し,目的地のタグを読み取った時に AT を停止させ,目的地に到着した旨を搭乗者に通知し,自動トランスポーテーションを終了する.
また,これまでに障害物回避のように走行している AT が目の前の障害物や他の移動体と衝突しないように回避しながら目的地に向かうことが研究・実装されてきた.
これまでに行われてきた AT における研究では,たとえ障害物が存在してもそれを回避可能な場合のみを想定していた.つまり,ATの目の前にある比較的小さなもの,例えば傘立てや人間などを避けることさえできれば目的地に到達することができる場合である.しかし,逆にどのように回避しようとしても先に進めず,目的地に到達できない場合がある.例えば工事中のため通行止めになっていたり,屋内で一時的に荷物が積まれていて通れない場合や,混雑していて移動体が入り込めないような場合などが考えられる.そういった場所を移動体は通過することができないため,別の経路を走行する必要がある.前述した屋内自動トランスポーテーションは現在位置と目的地を結ぶ経路を走行する機能しか持たないため,走行中に経路が突然塞がってしまったような場合に対応することができない.本論文では,このように走行経路上に障害物が現れ,経路が塞がってしまい,通行不能になったり,その場所から障害物が移動するなどして経路が通行可能になるような,短時間で状態が変化する環境を「動的環境」と呼ぶ.
また,一般に移動体自身に搭載されたセンサでは壁の向こう側にあるような,センサの視界に入らない場所に存在する障害物を認識することはできない.例えば,交差点で飛び出してくる子供を検知し,停止なり回避するといった問題は,移動体に搭載されたセンサのみでは解決することができない.また,目の前の交差点よりもさらに遠くにあり,視界を遮るものの向こう側に存在する通路が行き止まりになっているかどうかということを,移動体単体で知ることはできない.
動的環境において,目的地に向かっている途中でこれから走行する通路が通行できなくなってしまった場合,AT 単体では事前にそれを検知することができないため,通行できない場所まで走行してしまう.その場所に辿り着いて初めてこれ以上進めないということに気づく.そのような状態になった後に迂回する経路を探し,来た道を逆戻りして目的地に向かわなければならない.これは,搭乗者にとって効率が悪い.それゆえ,道が塞がったということを事前に検知して移動体に通知し,移動体の走行経路を変更する必要がある.つまり安全性だけでなく,効率性の向上が必要となる.そのためには動的環境を理解する仕組みが必要となる.
移動体単体では知ることができない情報を取得する方法としては,自身に搭載されているセンサ以外のセンサを用い,そのセンサが得た情報を移動体に送信することで搭乗者は死角に何かあるか,これから走行する通路が通行できるかどうかといった情報を取得することができる.
移動体の死角や直接見ることができない場所の情報を取得するものとして,交差点にカメラを設置し,交差点に至る各道路を撮影して俯瞰映像を生成してドライバーに提示する研究や,他の車両に搭載されているカメラを利用して鳥瞰図を作成し,ドライバーに提示する研究などが存在する.また,現在実用化されている仕組みとしては,VICS(Vehicle Information and Communication System)(http://www.vics.or.jp/)が挙げられる.VICSは,渋滞情報や工事情報,速度規制や所要時間などの道路交通情報を,各自動車に設置されているカーナビゲーションに反映させるシステムである.運転者は,渋滞している現場や,工事が行われている現場などを直接確認することなく,渋滞や工事があり,通行できない,もしくは通過するのに時間がかかるということを知ることができる.道路交通情報は高速道路などの道路脇に設置されているビーコンから取得する.
本論文では,動的環境における個人用知的移動体の自動走行の効率性を向上させるための手法を提案する.なお,この研究ではATおよび小型無人移動体は屋内で運用することに絞って述べる.以降,本論文で述べる「自動走行」は屋内自動走行を意味する.
本研究では,ATの外部で環境情報を取得する仕組みとして,センサを搭載し情報を収集する,自律移動が可能な小型無人移動体を開発して導入した.小型無人移動体は環境中を自律移動し,常に変化する環境を探索する.そして,小型無人移動体が取得した情報を利用することによって,AT の自動走行の効率化の実現を目指す.なお,本論文中で「自動走行」,「自律走行」という言葉を使用するが,「自動走行」と「自律走行」の違いは,機械が自動的に動作していても,それに乗っている人間がおり,いつでも手動に切り替えられるものを「自動走行」とし,無人の機械が常に自分で制御しなければならない場合を「自律走行」としている.
さらに,小型無人移動体が環境中を巡回することによって AT の自動走行の効率が上がることをシミュレーションによる実験によって検証した.
次章以降の本論文の構成は次のようになっている.まず第2章において移動体や自動走行一般について述べた後,個人用知的移動体の構成,制御システムについて述べる.そして,第3章では個人用知的移動体の自動走行について述べる.第4章では小型無人移動体の構成,小型無人移動体を用いた障害物の探索ついて述べる.そして第5章では個人用知的移動体と小型無人移動体の連携による自動走行の効率化について述べた後,効率化を検証するために行った実験について述べる.第6章では関連研究を紹介し,第7章でまとめと今後の課題について述べる.
2 個人用知的移動体ATとその制御システム
2.1 個人用の乗り物
近年,日本は超高齢社会(65歳以上の人口の総人口に占める割合が21%以上)を迎えており,国民における高齢者の割合は年々増加している.人は年齢を重ねると体力が衰え,自由に体を動かせなくなってきたり,記憶力が低下してきたりなど,身体機能や知覚・認知の機能が低下する.しかし,身体機能などが衰えていたとしても社会に進出したり,外で自由に動き回りたいという想いはあるだろう.そこで,高齢者一人一人の身体機能や知覚・認識機能を補助する必要がある.
高齢者一人一人が自由に移動することを補助するためには,電車やバスのような一度に多くの人を運ぶ乗り物ではなく,一人一人が別々に乗り,それぞれが自由に走行できるような乗り物が必要である.
そこで必要となるのが個人用の乗り物である.ここに知覚・認識機能を補助する仕組みを備え付けることができれば,高齢者の活動を補助することができるようになるのではないだろうか.
産業界を見てみると,近年パーソナルモビリティが提唱され,様々なタイプの乗り物が登場している.パーソナルモビリティは,一人乗りの小型の移動機器であり,一人当たりの移動にかかるエネルギー消費量の抑制を目指して開発されている.また,電気で動作し,排気ガスを出さないため,環境にやさしいという特徴がある.パーソナルモビリティの例としては,セグウェイ(図)や,トヨタ自動車の i-unit (図),本田技研工業の U3-X(図) などが挙げられる.

図2.1: セグウェイ

図2.2: i-unit

図2.3: U3-X
パーソナルモビリティは,屋内,屋外の両方で利用できるものも存在するため,搭乗者は常に乗り物に乗った状態で屋内・屋外の行き来をすることが可能である.
近年のエコロジーに関する問題や,高齢化社会の進行を考慮すると,パーソナルモビリティのような個人用の乗り物は今後,より必要とされると考えられる.
2.2 情報端末とその問題点
現在,我々の生活する実世界と情報の世界を繋ぐ考え方として,移動中や外出先などでいつでも,どこでもコンピュータを利用するモバイルコンピューティングが主流となっている.このことは,今日のノートパソコンや携帯端末の高性能化・高機能化や,携帯電話やPHSによるデータ通信の高速化からも明らかである.近年ではスマートフォンが登場しており,スマートフォン市場の規模も拡大することが予測されているため,これからもモバイルコンピューティングは主要な考え方として残り続けるだろう.また,モバイルコンピューティングの進化形として,小型化・軽量化した情報端末を常に身につけて使うウェアラブルコンピューティングという考え方も広がり,その考えを基にした研究も数多く行われている.
しかし,モバイルコンピューティングやウェアラブルコンピューティングというコンセプトのもと,情報端末の高性能化・小型化が進んでも 人間の生活する実世界と情報の世界を密接に結びつけることには限界があると考えられる.なぜなら,携帯端末を持ち歩くだけでは,人間の物理的な行動に連動させて情報処理を行い,その結果を直接的に人間の行動に対して反映させることができないからである.例えば,携帯電話を用いて現在位置周辺のレストランを見つけることができても,実際にそのレストランまで行くのはユーザ自身であり,携帯電話にはユーザをそのレストランまで連れて行くことはできない.また,超小型の端末を身に着けていれば,街中を歩くときに近くを走る自動車など周辺の情報とやりとりし,歩行者とドライバーの双方に危険を回避するように通知することはできる.しかし,実際に危険を回避するように行動するのは人間であって,小型の端末が人間を動かすのではない.それゆえ,人間が情報端末を持ち運ぶという発想をさらに発展させた考え方で,我々の日常生活一般を支援するシステムを実現することが期待される.
2.3 移動体と情報端末の融合
2.1節で述べたパーソナルモビリティと,2.2節で述べたモバイルコンピューティング,ウェアラブルコンピューティングを組み合わせることによって,モバイルコンピューティングやウェアラブルコンピューティングの欠点であった,実環境と情報世界を結び付けることの限界を克服することができる.情報端末で得た情報を移動に反映させることができるようになるため,人間を実環境で移動させたり,危険回避できるようになるためである.
このことから,2.1節で述べた,高齢者に対する身体機能や,知覚・認識の機能を補助することが可能となる.
次節で,身体的機能や知覚・認識の機能を補助する例として,移動体の自動走行,また,移動体間の連携による移動の安全性・効率性の向上について述べる.これらは,搭乗者が細心の注意を払わずとも,システムが安全に自動走行することを実現するものである.
2.4 移動体の自動走行
屋内で目的地を目指して移動する人にとって本来の目的とは,目的とする場所で何かをすることであって,移動そのものではない.それゆえ,人々は移動する際のコストや危険性を可能な限り低くしたいと考える.しかし,位置固定のフロアマップによる道案内では,まずそれらのマップを探し当て,さらにそこから空間把握能力を駆使して移動する必要がある.また,近年開発が進む携帯情報端末を利用した屋内道案内も機器ごとに複雑な操作を覚える必要がある.また,携帯情報端末を操作して情報を取得しながら移動することは,情報端末に気を取られて身近に迫る危険を見落とす可能性があるため,非常に危険であると考えられる.
そこで,移動体を自動走行可能にすることによってこのような問題を解決すると同時に,搭乗者が移動中に移動とは直接関係の無い作業をすることを可能にする.それゆえ,移動体の自動走行は,素早く,安全に,そして楽に目的地へ移動したい人々にとって有効な仕組みである.
屋内の自動走行を実現している例として,動く歩道やエスカレーター,工場内で物を運搬する移動体やテーマパークのアトラクション内で稼働する移動体が存在するが,これらの乗り物は,「あらかじめ設置された経路上を人や移動体が動く」という考え方で作られているため,任意の目的地や経路を設定することができない.物ではなく,人間が搭乗する個人用の移動体であることを考慮すると,個人の意思に応じて自動走行する開始位置と目的地を自由に決定できる仕組みが望まれる.つまり,床や天井に移動を補助するレール等を設置することなく,搭乗者や周囲の状況に柔軟に対応する自動走行を実現する必要がある.
2.5 屋内の走行環境の将来像
屋内環境は,将来的には人間,人間が搭乗する移動体,そして,環境を監視する役割を持つ小型無人移動体が混在するものになると予測される.このような環境のイメージを図に示す.
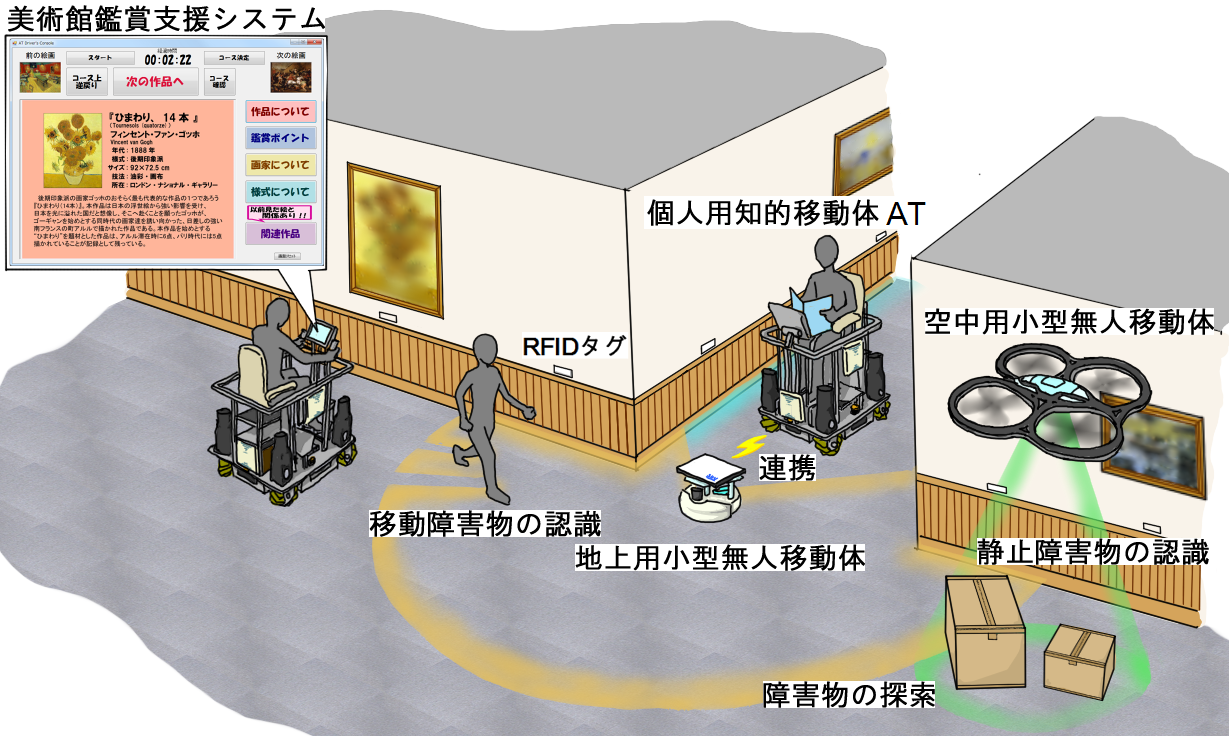
図2.4: 将来の屋内環境
人間が搭乗する移動体は,自身に搭載されているセンサ,小型無人移動体を含めた他の移動体が取得した情報を利用しながら自動走行を行い,目的地に関する情報や周囲の状況といった情報提示など,移動以外のサービスも搭乗者に提供する.
小型無人移動体は様々な大きさや形態があると考えられる.例えば,人間が気にならないほど小さなものや,飛行して天井付近から廊下などの状態を監視するものが考えられる.機能としては,センシングだけではなく,周囲の映像を撮影することや,警備や清掃といったことも考えられる.小型無人移動体は,屋内の決められた領域を走行しつつ,個人用知的移動体からタスクが与えられたら,環境内に複数存在する小型無人移動体のうち,最もそのタスクを実行するコストが低いものがそのタスクを実行する,つまり,小型無人移動体は環境内のセンシング等の仕事をこなしつつ,場合によっては外部から与えられる突発的な要求にも応えるといった運用方法になると考えられる.
2.6 本論文での走行環境
本論文では,上で述べた小型無人移動体の運用形態のうち,屋内という環境内をATとは独立に小型無人移動体が走行し,環境内を巡回してセンサ情報を逐次サーバに送信する場合を取り上げる.なぜなら,この運用形態にすることにより,個人用知的移動体の自動走行の効率性を向上させることができると考えられるためである.
ここでは,個人用知的移動体 AT,小型無人移動体,建物内に設置されたサーバの3つのシステムが存在する環境を想定する.搭乗者はATに乗り込み,目的地を設定することによって,サーバはそのATの現在位置から目的地までの経路を生成し,それを基にATは目的地まで自動走行する.また,小型無人移動体は建物内の定められた領域を巡回し,センサ情報をサーバに送信し,サーバの中に格納されている環境地図の情報を動的に変更する.
2.7 個人用知的移動体AT
個人用知的移動体は,移動体に情報処理・通信機能を持たせた一人乗りの移動体である.移動体自身を情報端末にすることにより,大きく分けて2つの利点が挙げられる.一つは,デバイスを常に持ち歩くため,常時情報を取得することができるというモバイルコンピューティング,ウェアラブルコンピューティングの利点を引き継ぐことが可能な点である.そして,もう一つは,ユーザが情報端末からナビゲーションの情報や,危険回避の通知を受けた後に,ユーザ自身が行動を起こさなければならないというモバイルコンピューティング,ウェアラブルコンピューティングの持つ欠点を克服できる点にある.
個人用知的移動体は,人間を移動させることと実世界と情報世界を繋ぐという2つの目的を持っている.我々はこのような目的を持つ情報処理の仕組みを,搭乗型(マウンタブル)コンピューティングと呼んでいる.この搭乗型コンピューティングのコンセプトのもと,我々は,個人用知的移動体の一つの例としてAT(Attentive Townvehicle)を開発した.
個人用知的移動体は,搭乗者である人間や,AT自身を取り巻く環境に適応し,個体間通信によって協調的に動作することを目的とした移動体である.ATはそれ自体が情報端末であるがゆえに,搭乗者である人間は常に情報世界にアクセスでき,また情報世界からのフィードバックをすぐに反映することができる.
2.7.1 ATの外観
現在,我々の研究室で研究・開発を行っているATの外観を図に示す.ATの車体にはアルミが使用され,メカナムホイールと高トルクのサーボモータが使用されている.車体の幅は,扉やエレベータの入り口を通り抜けることが可能なサイズに抑えられている.
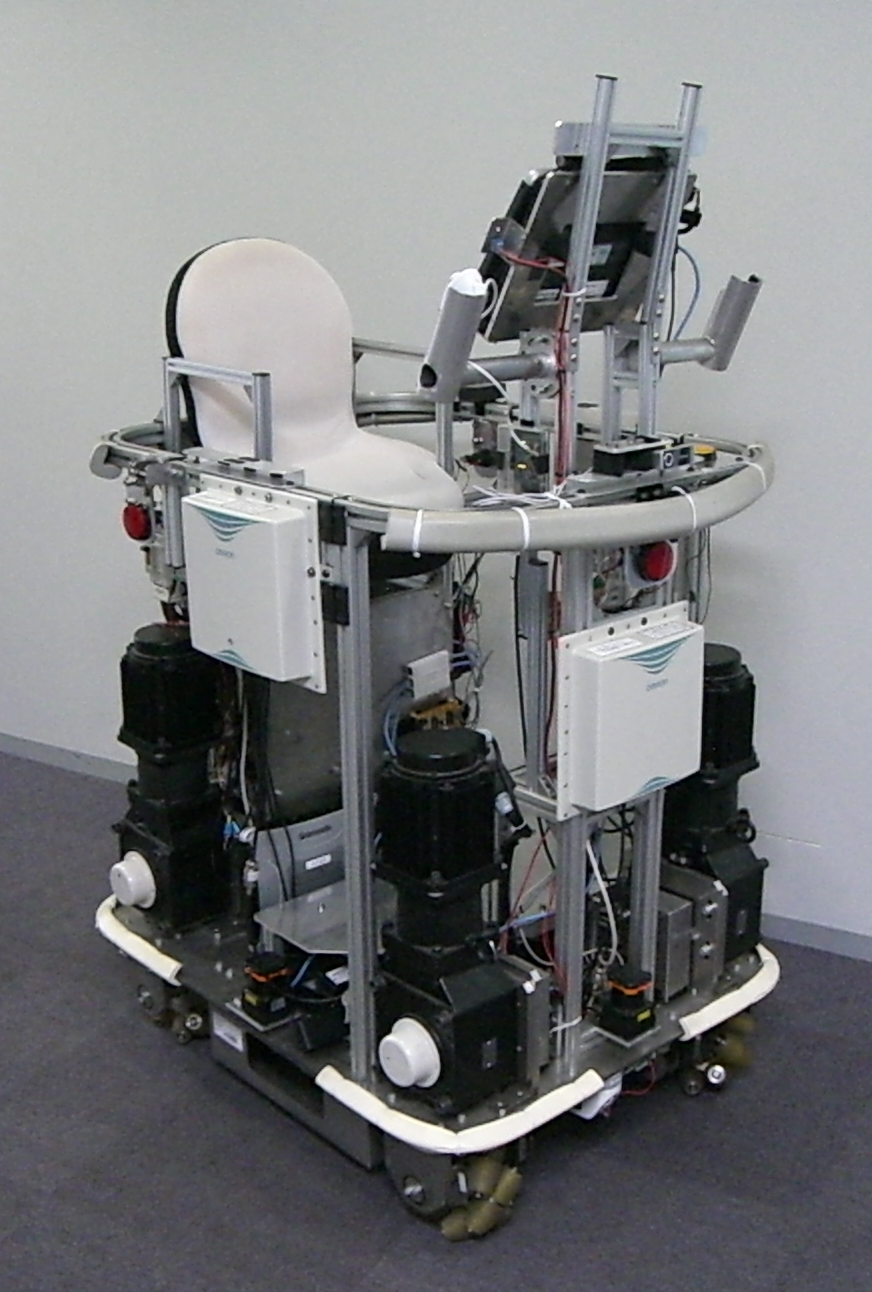
図2.5: 個人用知的移動体 AT
2.7.2 ATのコンセプト
ATは,搭乗者である人間やAT自身を取り巻く環境に適応することで搭乗者を支援する,全方位移動・自動走行可能な個人用の乗り物である.

図2.6: ATに関わる研究分野
上図に示すようにATにおける研究領域は多岐に渡っている.以下に各研究分野の解説と,それに関連する我々の研究成果について述べる.
【ATと環境とのインタラクション】ここでいう環境とは,物理的環境(実世界)と情報的環境(情報世界)の2つの意味を持つ.物理的環境とは,人間やATが物理的に作用しあう環境である.人間は感覚によって物理的な世界を認識するように,ATはセンサ類によって世界を認識し,人間が運動によって物理的な世界に影響を与えるように,ATはモータによって物理的な世界に影響を与える.一方,情報的環境とは,ATがアクセスできるコンテンツやサービスの集合を示している. これに関して行われた研究に,実世界対象物の認識手法や場所に連動した情報コンテンツの利用などがある.
【ATと人間とのインタラクション】ATは搭乗者の特性を把握し,適応していく「個人適応」という研究課題がある.搭乗者によって,提示するインタフェース,ATの移動速度や加速度,搭乗者の嗜好や,その場の状況に応じた情報を提示するなどの研究が行われている.また,これまでにはATを降りた搭乗者を追尾する研究も行われてきた.
【ATの個体としての自律性】人間の生活において基本的でかつ重要な「移動」という行為を支援するために,感覚機能を強化し,障害物を回避するといった自律的に動作する研究も行われている.これまでに,柔軟な制御をするためのアーキテクチャに関する研究や,移動障害物の動きを予測し,それを基に回避する研究が行われてきた.
【ATにおける搭乗者の安全性】ATは移動ロボットや荷物などを輸送する無人の移動体と違い,搭乗者が存在する.そのため,走行するにあたって搭乗者の安全性に細心の注意を払わなければならない.これまでに,搭乗者の操縦を支援し,障害物との衝突を回避する研究が行われてきた.
【AT間(移動体間)のインタラクション】移動体間通信を行うことで,AT同士が協調して走行することができる.これまでに,接近しているAT同士が衝突回避を行う研究や,無人のATが有人のATを追尾するなどの研究が行われてきた.また,AT同士の通信だけでなく,搭乗者間のコミュニケーションを共有・再利用するなどの研究も行われた.
以上のように,ATは搭乗者や他のATなどと,センサ類を用いて様々なインタラクションを実現することによって,搭乗者である人間や,環境への適応,安全性の向上を可能としている.
2.8 制御アーキテクチャ
2.8.1 サブサンプション・アーキテクチャ
ATの制御システムはサブサンプション・アーキテクチャと呼ばれるアーキテクチャに基づいて設計されている.サブサンプション・アーキテクチャとは,柔軟なロボット制御を実現するためのアーキテクチャである.その特徴は,センサ入力と,モータ出力を行うレイヤが複数存在し,それぞれのレイヤに異なる制御手法を割り当てることで,複数の制御手法を並列に処理することができることである.これらのレイヤは下位のものほど単純で,上位のものほど複雑・高度な処理となる.各制御手法を並列に処理しているため,状況に応じて適切な制御手法を実行することができる.
また,新たなレイヤを加えることで機能を拡張することができる.このように,サブサンプション・アーキテクチャには容易に機能を拡張できるという特徴も存在する.
2.8.2 レイヤの構成
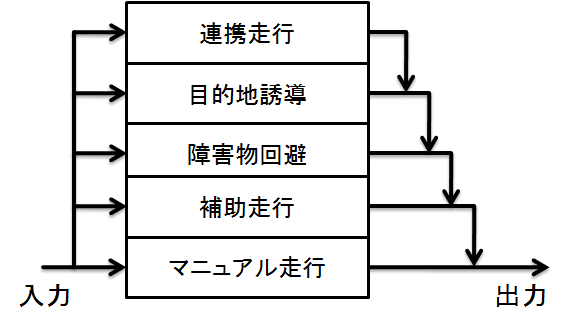
図2.7: レイヤの構成
個人用知的移動体におけるレイヤの構造は以下の通りである.第1レイヤであるマニュアル走行が最も下位のレイヤであり,第5レイヤである連携走行が最も上位のレイヤである.
- 第1レイヤ:マニュアル走行 ・・・ 後述する操縦コントローラによって搭乗者の操作を受け付けるレイヤ
- 第2レイヤ:補助走行 ・・・ 一定距離以内に障害物が存在した場合,停止や進路を自動調節するレイヤ
- 第3レイヤ:障害物回避 ・・・ 障害物を検知しそれを回避するレイヤ
- 第4レイヤ:目的地誘導 ・・・ 地図に基づいて現在位置から目的地まで自動走行を行うレイヤ
- 第5レイヤ:連携走行 ・・・ 他の移動体と連携しながら走行するレイヤ
各レイヤ間のインタラクションが可能であり,高位のレイヤは低位のレイヤの出力を抑制,置換することができる.各レイヤが並列動作をしており,状況に応じて実行されるレイヤが変わる.各レイヤはセンサやコントローラの入力を基にモータに出力するパラメータを計算し,モータドライバに対して値を出力するシーケンサに対して非同期に値を出力する.シーケンサ内部では,常に各レイヤから入力された値を観察しており,同時に入力された値の中で最も上位のレイヤの値をモータドライバに出力する.
2.8.3 制御システムの改善
ATの制御システムの設計思想は一度大きく変わっている.以前の制御システムでは主に2つの点が問題となっていた.一つは,自動走行をする際,単一の制御手法しか動作させることができないことである.つまり,地図に従って目的地まで誘導している時,たとえ障害物が現われたとしてもその障害物を回避することができない.そのため,静止障害物の場合はレーザレンジセンサで,移動障害物の場合は環境に設置されたセンサで障害物を検知し,適当なタイミングで目的地誘導のプロセスを停止し,障害物回避を行うプロセスに切り替えて走行を継続していた.このようにすることで目的地に向かいながら、障害物を回避する自動走行を実現した.
しかし,本来ならばいつ障害物が現われても回避できるように,目的地に向かって進むことと障害物回避は同時に行われなければならない.目的地誘導と障害物回避を切り替えながら走行した場合,レーザレンジセンサで障害物を発見してから回避行動に移る際の制御手法の切り替え処理に時間がかかってしまい,遅延が生じてしまう.
もう一つの問題点は,開発コストが高いことである.以前は,特定の目的に合わせた開発を行う際,基本的な機能がモジュール化されていなかったため,マニュアル走行や自動走行などの機能を含めて開発を行っていた.また,走行に関する複数の機能ごとに,それぞれが保持する情報を共有できないといった我々の実装に関する問題点があった.そのため,目的地を考慮しながら障害物回避を行うことができなかった.
過去の制御システムではこのような問題点が存在し,この問題点に関して機能の改善の必要があったため,サブサンプション・アーキテクチャを用いて実装を行った.その結果,複数のプロセスを同時に実行することができるようになり,障害物回避への移行がスムーズに行えるようになった.また,新たな機能を付け加えても下位のレイヤを上位のレイヤの実装に合わせて出力の仕組みを変える必要がないという,開発コストの軽減,拡張性の向上も実現した.
2.9 ATによる全方位移動
2.9.1 全方位移動
現在,我々が開発中のATの特徴の一つは,全方位に移動できることである.我々はそのような移動体を「オムニムーバー(OmniMover)」と呼んでいる.オムニムーバーは,2章で挙げたセグウェイのようにその場回転をして任意の方位を向いてから走行するものでなく,静止状態からならばどの方位にもすぐに動くことが可能である.ただし,既に動いている状態で任意の方向に動くためには慣性を考慮しなければならない.また,乗っている人間への加速度の影響も考慮しなければならないため,動いている最中はすぐに動きたいと思う向きに動けるわけではない.
それでも,全方位に動くことが可能であるということは,これまでの乗り物とは違った動き方ができるということである.それは,例えば障害物や人などの避け方に現れてくる.図のように,従来のタイヤで走行している乗り物,例えば自動車は,止まっている状態から真横に動くことができないため,障害物や人間が乗り物の間近に接近してしまうと回避しきれず衝突してしまう.しかし,全方位移動可能な乗り物ならば回避時に障害物に接近せず,真横に回避することができる.それにより走行の柔軟性や安全性が高まるため,ATを全方位に移動できるようにした.
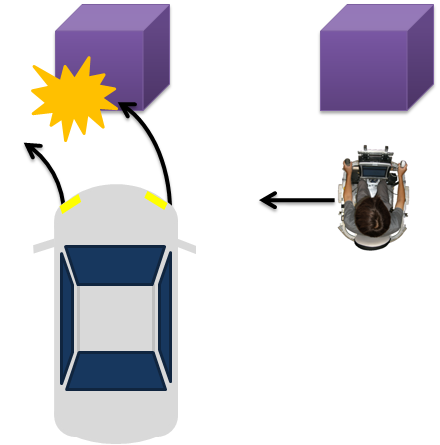
図2.8: 自動車とATの障害物に接近した時の避け方の違い
我々の研究では,フォークリフト等にも使用されているメカナムホイールという技術を採用している.ここでは,メカナムホイールと,それを用いて実現した全方位移動のメカニズムについて述べる.
【メカナムホール】
本研究で用いるメカナムホイールの外観を図に示す.メカナムホイールは,車軸に対して45度傾けられた小型のローラーを車輪の周囲に等間隔に8つ並べて取り付けられた車輪である.大きい本体としての車輪はモータによって制御することができるが,周囲のローラーは動力を持たず,空転するのみである.メカナムホイールは正回転する際,ホイール自体は前方向に移動するように回転するが,車軸に対して45度傾けられた方向に配置されたローラーにより,ローラー軸方向に対して法線方向の推進力が生じない.この結果,メカナムホイールは,ローラー軸と平行の方向に進行する.したがって,4輪の進行方向の組み合わせによって全方向移動が可能となる.
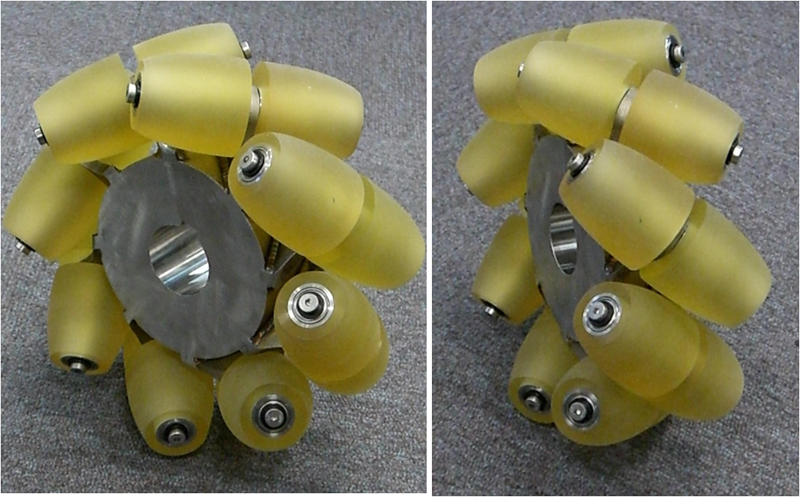
図2.9: メカナムホイール
2.9.2 全方位移動のメカニズム
全方位移動,およびその場回転は,ATに対して図のように平行に配置された4つのメカナムホイールを個別に制御することによって実現している.メカナムホイールとベルトでつながれた高トルクのサーボモータは任意の速度制御が可能であり,またトルクを0にすることで空転させることができる.前後左右に動かす時は,4輪の回転速度を等速にして,それぞれの回転方向(正転または反転)を動く方向に合わせて調節する.例えば右方向へ動かす時は,図の(A)と(D)を正転方向,(B)と(C)を反転方向に動かすことで移動させることができる.車体から45度の方向へ動かす時は,右斜め前に移動することを例にとると,図の(A)と(D)のタイヤを正転方向に動かし,(B)と(C)のタイヤを空転させることによって,移動させることができる.それ以外の任意の方向への移動は,4輪の回転速度と回転方向を細かく調整することによって実現できる.なお,その場回転は,(A)と(C)を正転方向(あるいは反転方向),(B)と(D)のタイヤを反転方向(あるいは正転方向)へ回転させることで実現できる.
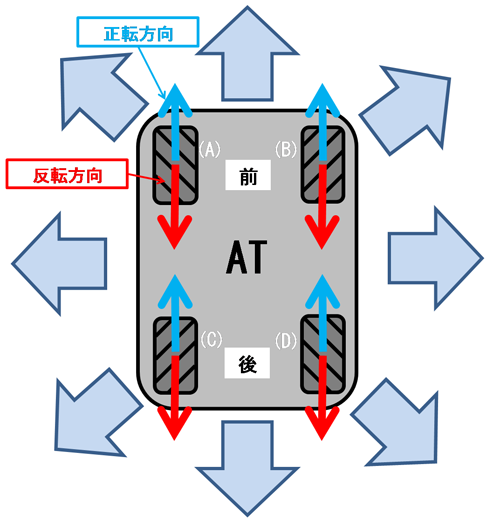
図2.10: 全方位移動のメカニズム
上記の方法により,駆動系に4つのメカナムホイールを用いたATは,本体の向きや車輪の向きをを変えずに任意の方向へ移動できるため,図のように障害物回避をスムーズに行う.これまでに実用化されている移動体には不可能な,静止状態から真横に移動する動作が可能になり,ATは障害物や人間が接近している場合でも衝突することなく安全な回避を行うことができる.
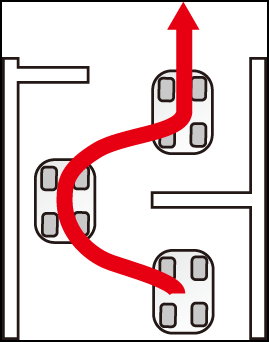
図2.11: 全方位移動による障害物回避
2.10 システム構成
ATのシステム構成図を図に示す.また,ATに搭載されているセンサの名称と使用目的を表に示す.
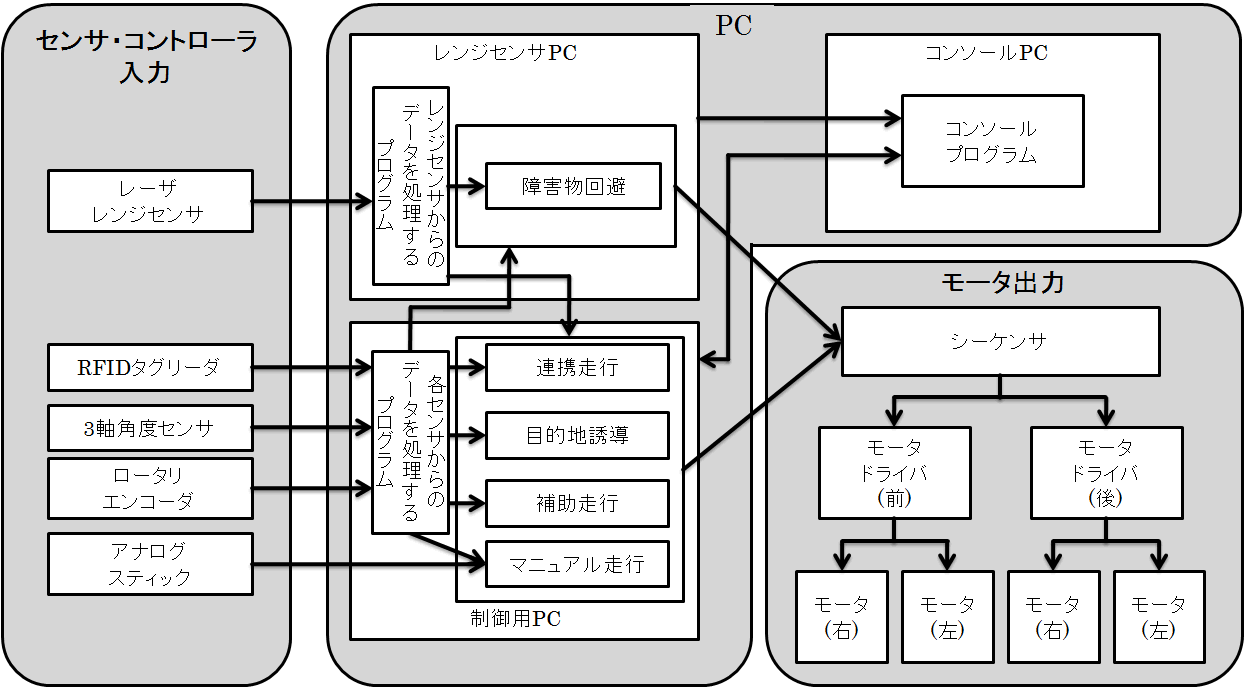
図2.12: システム構成図
|
センサデバイス名 |
使用目的 |
|
レーザレンジセンサ |
障害物回避,壁沿い走行など幅広く利用されている |
|
RFIDタグリーダ |
自身の位置と地図とを照合,目的地の認識を行うために利用されている |
|
3軸角度センサ |
自身の向きを知るために利用されている |
|
ロータリエンコーダ |
ATの走行距離を計算するために利用されている |

図2.13: レーザレンジセンサ

図2.14: RFIDタグリーダ

図2.15: 3軸角度センサ
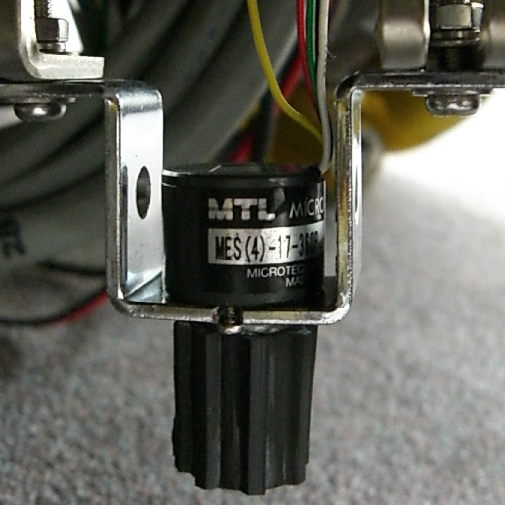
図2.16: ロータリエンコーダ
ATの制御には3台のPCが使用されている.これらのPCはAT上に設置されたネットワークハブに接続されている.それぞれの役割について以下で述べる.
【制御PC】ATを構成する5つのレイヤのうち,マニュアル走行,補助走行,目的地誘導,連携走行が稼働している.また,RFIDタグリーダ,3軸角度センサ,ロータリエンコーダは制御用PCに接続されており、それぞれのデータを処理するプログラムが稼働している.
【レンジセンサPC】ATを構成する5つのレイヤのうち,障害物回避のレイヤのプログラムが稼働している.また,レーザレンジセンサからのデータを処理するプログラムも稼働している.レーザレンジセンサの処理プログラムは,常にATの周囲の物体までの距離を計測している.制御用PCとこのPCの2台のPCにレイヤが分割されているのは,PCに対する負荷分散のためである.5つのレイヤのうち最も計算負荷の高い障害物回避レイヤのみをこちらのPCで稼働させている.
【コンソールPC】搭乗者の手元に設置されているPC.タッチパネルを搭載しており,搭乗者のためのユーザインタフェースを提供するコンソールプログラムが稼働している.搭乗者はこのPCを利用して目的地の設定や,情報の閲覧などを行うことができ
これらのPCはすべてネットワークハブを経由してシーケンサに接続されており,すべてのレイヤが処理した結果はシーケンサに出力可能である.また,全てのレイヤは,各センサ処理プログラムからセンサ情報を取得することが可能である.
2.11 ATの操縦方法
2.11.1 操縦モード
ATは搭乗者に対して複数の操縦方法を提供している.次にそれらの操縦方法の詳細について述べる.
【マニュアル走行】
マニュアル走行モードは,搭乗者による入力をそのまま動作に反映するモードである.図のレイヤのうち,一番下のマニュアル走行レイヤのみを有効にすることによって実現している.搭乗者の入力は後述する操縦インタフェースを用いて行う.
【補助走行】
ATは全方位移動という自由度の高い動きができるがゆえに,搭乗者の注意が及ばず,操縦ミスなどによって障害物に衝突してしまう危険性がある.補助走行は,壁や障害物などと衝突しないような機能を提供する.補助走行モードでは,周囲の障害物までの距離を常に計測しており,壁や障害物などに衝突しそうになったときに停止したり,ぶつからない方向に走行する向きを調節したりなど,搭乗者の操縦を支援することができる.搭乗者は複雑で狭い通路でも,行きたい方向を指定するだけでATは図のようにATの向きを変えずに自動的に障害物を避けながらその方向に向かって走行する.
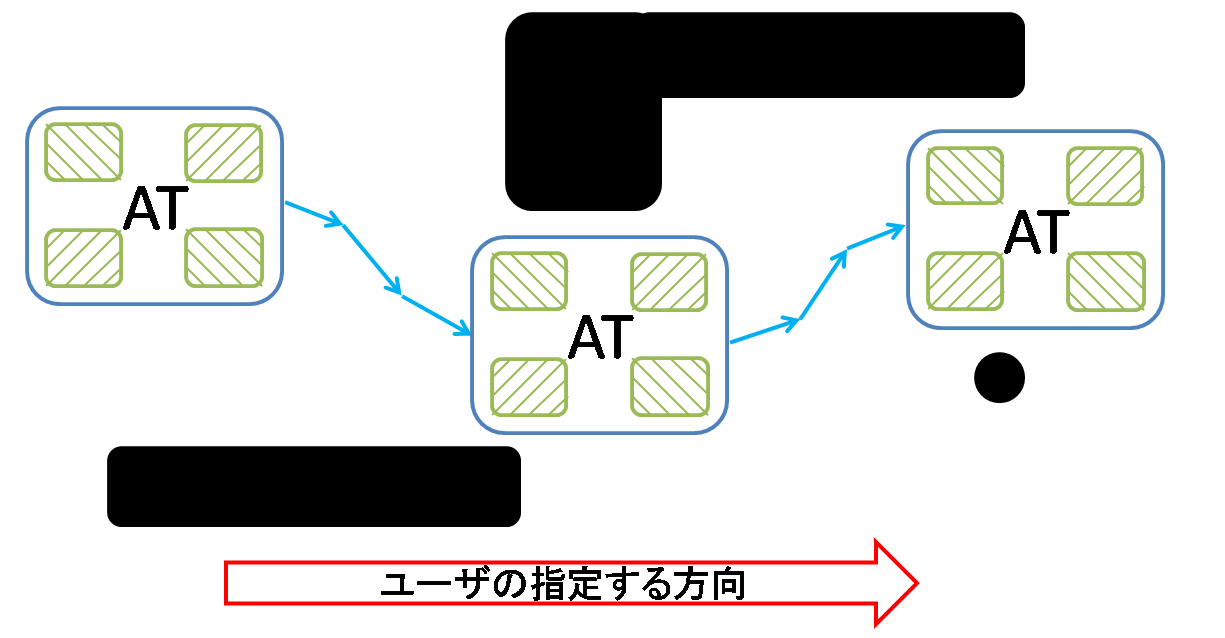
図2.17: 補助走行による搭乗者の運転支援
このモードは,図のレイヤのうち,マニュアル走行レイヤと補助走行レイヤを有効にすることによって実現している.
【自動走行】
自動走行モードでは,補助走行モードの機能に加え,以下の機能を提供する.
- 搭乗者が目的地を指定したときに目的地まで自動的に走行する機能
- 障害物を認識したらそれを自動的に回避する機能
- 他の移動体と連携・協調する機能
ATが自動走行しているとき,つまり,他の移動体と連携・協調走行しているとき,または目的地が設定されているとき,もしくは障害物を認識しているときは搭乗者による操縦は優先されず,AT自身の判断が優先される.搭乗者がマニュアル走行モード,補助走行モードに切り替えることによってATの操縦の優先権をシステムから搭乗者に戻すことができる.
ただし,状況によっては自動走行モードを解除できない場合もある.例えば,交差点内を走行している場合である.交差点内を自動走行しているATが突然マニュアル走行モードなどに変わってしまった場合,自動制御できなくなってしまい,他の移動体と連携した動作ができなくなってしまったり,障害物回避ができなくなってしまい,他の移動体と衝突してしまう危険性があるためである.そのため,危険と判断される状況においては搭乗者が自動走行を解除することはできない.
逆に,自動走行モードであったとしても,目的地が設定されておらず,周囲に障害物が存在しない場合は,搭乗者はATを操縦することができる.
自動走行モードは図のすべてのレイヤを有効にすることによって実現している.その理由は,自動走行を行う際,当然,目的地まで走行する機能が必要であり,さらに目的地まで走行する過程で障害物と遭遇した時に障害物を回避する必要があるため,また,安全で効率的な自動走行をするにあたって他の移動体と連携・協調する必要があるためである.
自動走行に関しては次章にて詳細に述べる.
2.11.2 制御の切り替え
図のそれぞれのレイヤは,有効・無効の状態を切り替えることができる.ただし,これは搭乗者が自由にレイヤを選択して有効・無効を切り替えられるという意味ではない.サブサンプション・アーキテクチャは下位のレイヤを包摂するアーキテクチャであるため,上位のレイヤは下位のレイヤが存在しなければ適切な処理をすることができない.ATにおいては,各レイヤの有効・無効の状態を切り替えられるようにしつつも,有効になっているレイヤよりも下のレイヤが無効になっているという状況が起こらないようにするために,各レイヤの有効・無効状態を操縦モードに応じてあらかじめ決めておき,搭乗者にいくつかある操縦モードのうちいずれかを選択させる方式を取っている.つまり,搭乗者が操縦モードを切り替えることによって,それぞれのレイヤの有効・無効の状態を切り替えることになる.このように,ATにおける制御アーキテクチャは,サブサンプション・アーキテクチャをレイヤの有効・無効を切り替えられるように拡張したものであると言える.
なお,どのパターンにおいてもマニュアル走行レイヤが有効となるが,これは,マニュアル走行レイヤよりも上のレイヤが有効になっているときはマニュアル走行レイヤを無効にできないということ以外に,どの操縦モードを選択した場合でも搭乗者が操縦を行うことができるということを意味している.マニュアル走行レイヤよりも上のレイヤが有効になっているか,無効になっているかによる違いは,状況によって搭乗者の操縦がATの動作に反映されるかされないかという点にある.
このように,搭乗者は自動走行モードにしたり,マニュアル走行モードにしたりなど,ある意味メタ的に制御方法を選択することができる.また,補助走行モードにおいては,障害物に接近した場合,自動走行モードにおいては,目的地が入力された場合,障害物を認識した場合,他の移動体と連携・協調して走行する場合にシステムが制御の主導権を持ってATを動かし,そうでない場合は人間が主導権を持ってATを操縦することができるように,状況に応じてシステムと搭乗者のどちらが制御の主導権を持つかを変化させることができる.
2.11.3 制御の切り替え
搭乗者は,手元のコントローラのアナログスティックを倒したり,リモコンのボタン操作をすることによりATを操縦することができる.将来的には,ATの利用者は全員,個人を識別するIDが保持された自分専用のコントローラを所持することを想定している.これは,所有者の操縦履歴や嗜好を記録することにより,目的地や走行速度,提示される情報をカスタマイズするためである.
【コントローラ】
ATを操縦するためのコントローラは2種類存在する.1つ目は,アナログスティックのついた有線のコントローラ(図)である.アナログスティックを倒す向きと角度によってATの移動方向と速度を決めることができる.また,図の人差し指の部分にあるボタンを押しながらアナログスティックを左右に倒すと,その場回転をすることができる.このコントローラは,ATに装着したまま使うことも,手に取って使うこともできる.

図2.18: コントローラ

図2.19: アナログスティックの付いたコントローラ
2つ目は,ATを遠隔から操作するための,十字キーのついた無線のコントローラ(図右)である.このリモコンは,ATを降りてから操作するために備え付けられている.ATとはBluetoothによって接続されており,ATと物理的に接続されていないため,離れたところからも操作することができるようになっている.十字キーによって 8 方向に移動させることができ,'+', '-' ボタンによって右回転,左回転をさせることができる.また,ATを回転させるための操作はもう一つ存在する.ATの前後左右に1つずつ赤外線LEDが搭載されており(図),リモコンをこれに向け,LEDの方向を軸にリモコンを左右に回転させることにより(図),ATを回転させることが可能である.

図2.20: ATに搭載されている赤外線LED
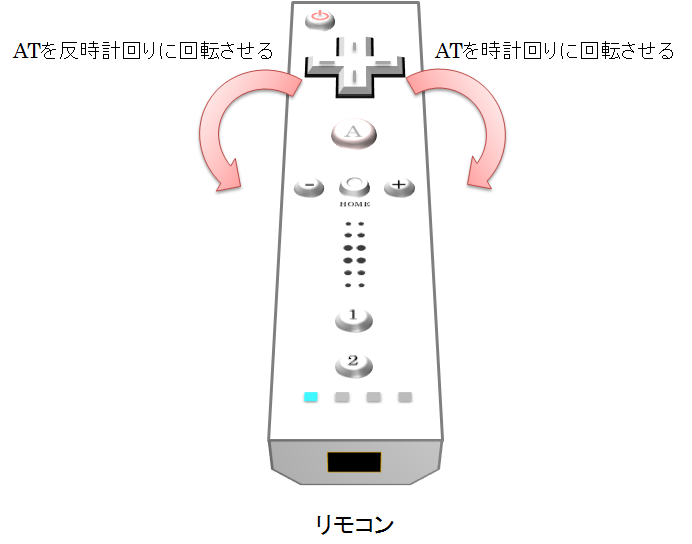
図2.21: ATを回転させる方法
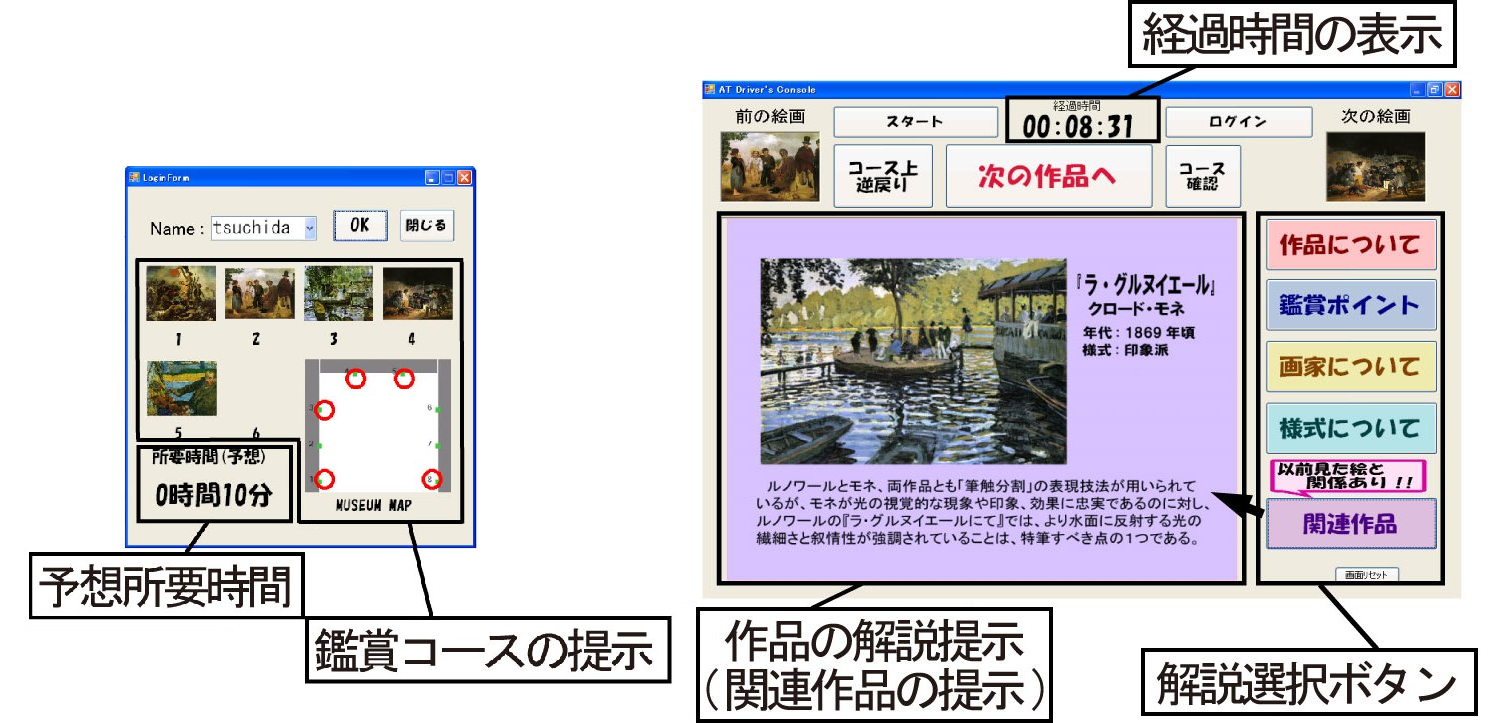
図2.22: 美術館鑑賞支援システム上のコンソール
【押しボタン】
ATの前後左右には赤いボタン(図)が設置されている.ボタンを押すことによって押した方向に向かってATを移動させることができる.また,時間差をつけて複数のボタンを押すことによって押した順の方向にATを回転させることができる.例えば,ATの右側のボタンを押しながら後ろ側のボタンを押すことによって右回転させることができる.これらのボタンは,ATの外から簡易的にATを操作するために取り付けられている.さらに,ATが走行している間は緊急停止スイッチとしての機能を持つ.
図2.23: 簡易的にATを操作可能なボタン
2.12 連携走行の機能
ATは,環境情報を配信するサーバや他の移動体と通信することが可能である.例えば,ATは環境情報サーバを経由して遠隔地に存在する移動体が取得した情報を取得することができる.さらに,4章で説明する小型無人移動体(SUV)と通信して連携することで,SUVの取得したセンサ情報と,ATが取得したセンサ情報を統合することにより,あたかもSUVがATに設置されているセンサであるかのようにセンサ情報を扱うことができるようになる.つまり,SUVが取得した障害物に関する情報をATが利用して障害物回避などに活かすことができるようになるということである.また,これから走行する予定の経路が通行不能になったということを,遠隔にいるATが知ることができる.この仕組みの詳細については5章で述べる.
2.13 まとめ
本章では,筆者が所属する研究室で研究・開発している個人用知的移動体ATとその制御システムや機能について述べた.ATはサブサンプション・アーキテクチャに基づいて設計されており,制御システムが改善され,柔軟な走行が可能になった.また,全方位移動が可能なため,走行方法,障害物の回避方法に柔軟性があり,従来の乗り物に比べて安全な回避が可能である.また,ATにはマニュアル走行モード,補助走行モード,自動走行モードの3種類の制御方法が存在し,搭乗者は自由にモードを選択することが可能である.
次章では,ATの機能のうち,特に自動走行について詳細に述べる.
3 個人用知的移動体による自動走行
移動体に人間や荷物を乗せ,自動的に移動させることにより,人間が操縦する手間を省くことができる.テーマパークや工場などではこのようなことが日常的に行われている.我々は移動体が自動走行し,人間や荷物を運ぶことを自動トランスポーテーションと呼んでいる.我々が研究・開発しているATにおいても自動トランスポーテーションが実現されており,搭乗者の負担を軽減し,さらに安全に走行することに役立っている.ATにおける自動トランスポーテーションと工場やテーマパークで実現されているような自動トランスポーテーションで異なる点は,パーソナライゼーションにある.ATは搭乗者の趣味・嗜好,搭乗経験などに応じて提示する情報や速度等を自動的に調整することができる.本章では,ATにおける自動トランスポーテーションについて述べる.本論文では,屋内での自動走行について述べるため,以下では屋内自動トランスポーテーションと記述する.
ATにおける屋内自動トランスポーテーションでは,搭乗者がAT上で目的地を設定するとその目的地まで安全に自動走行し,その走行途中に搭乗者の状況や要求に応じた施設内の様々な場所や対象物に関する情報,あるいは目的地に関する情報を搭乗者に対して提示するものである.またこの仕組みは,美術館や博物館,さらには総合病院や空港のような大規模屋内施設での利用を想定している.それは,徒歩では移動が大変であるうえに,道に迷ってしまう可能性があり,屋内自動トランスポーテーションを利用することで楽に迷わずに移動できるためである.
屋内自動トランスポーテーションでは,床や天井に移動を補助するレールのような環境設置型のガイドを設置することなく,搭乗者や周囲の状況に柔軟に対応する自動走行を実現した.そのため,個人の意思に応じて自動走行する出発地や目的地を自由に決定することができる.環境設置型のガイドなしに自動走行を実現する手段の一つとして,車輪の回転数により移動体の自己位置を推定する方法がある.しかし,この手法は走行距離に伴って増加する推定誤差を無視できない.特に,ATはメカナムホイールを使用しており,タイヤの空転を利用して全方位移動を可能にしているため,車輪の回転数から走行距離を推定することは容易ではない.そこで,屋内自動トランスポーテーションでは,屋内を壁と一定距離を保ちながら走行する壁沿い走行をすることで地図との対応を取りやすくし,さらに壁に設置したRFIDタグを位置推定のためのランドマークとした.
本章では,まず,ATを用いて構築した屋内自動トランスポーテーションのシステム全体の構成について述べ,次に自動走行をするにあたって必要となる位置情報の取得に関する仕組みを述べ,その後,具体的な自動走行の実現方法を述べる.
3.1 地図情報に基づく屋内自動トランスポーテーション
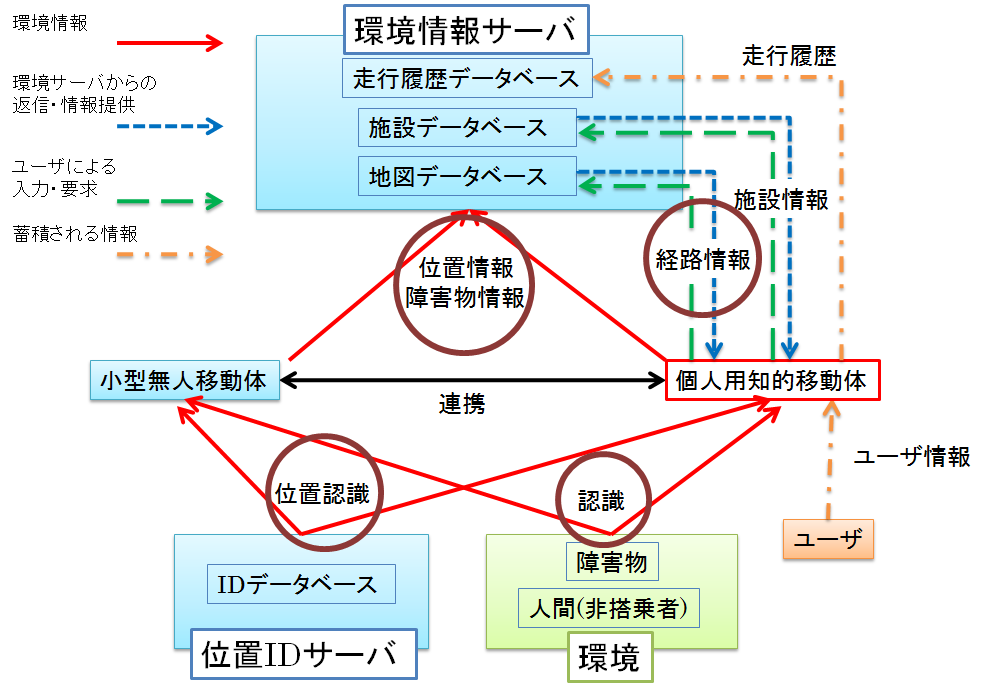
図3.1: 本研究におけるシステムの全体図
本研究では,図中の,丸印が付与されている部分を主に扱う.すなわち,個人用知的移動体と小型無人移動体による位置認識,移動経路上に存在する障害物の認識,環境情報サーバへの現在位置および障害物情報の通知,個人用知的移動体による環境情報サーバに対する経路情報の要求,環境情報サーバによる個人用知的移動体に対する経路情報の提供である.走行履歴や施設情報の利用,個人用知的移動体と小型無人移動体の連携については,本研究では対象としない.
環境情報サーバは建物内にいる全てのATと通信し,ATの現在位置や目的地,走行経路などを把握している.
ATは定期的に環境情報サーバに対して自身の位置を送信し,必要な時に周辺の地図情報の取得要求を送信する.搭乗者が目的地を指定した場合は,ATは目的地の位置情報と目的地までの経路・動作情報の取得要求を環境情報サーバに送信する.環境情報サーバは,各ATからの要求に応じて地図情報や経路・動作情報を送信する.それ以外にも,各ATの現在位置に応じて周辺の混雑状況や一時通行禁止場所情報等の経路情報を,定期的に送信する.
一部の通路が通行不可になったとしても,サーバの地図情報を更新することによって全てのATがその通路を通らないようにすることができる.これについての詳細は4章にて述べる.
また,建物内の全ATの位置や走行経路を環境情報サーバが把握することによって,ATで混雑している経路とそうでない経路を判断することができる.また,近い将来混雑するであろう通路を予測することもできる.それゆえ,多くのATが同じ通路に集まらないように事前に各ATに通知を行うことが可能である.
複数のATが同じ場所に集まらないようにすることは,AT同士の衝突を防止することにつながると考えられる.これまでに研究されたAT同士の衝突回避方法は,制動距離範囲内に別のATが接近した場合にAT間で通信して速度制限や動作停止などの回避行動をとり,.ATが自動で走行しているため,AT同士が接近してから衝突回避を行うのではなく,将来すれ違うであろうATも予測して事前に速度や経路を調整するといったより広い視野で衝突回避を行うことが望まれる.環境情報サーバが全ATの動きを管理すれば,このようなATならではの衝突回避が可能である.
3.2 位置認識のための仕組み
3.2.1 壁沿い走行とRFIDタグによる位置認識
屋内を自動走行する際,壁沿いを走行することで人間や他の移動体と衝突したり交差したりする確率を軽減することができる.また,周りに壁が存在しない場合よりも自分の位置を見失いにくい.しかし,壁に沿って進んでいるだけでは,ATは自分が地図上のどの辺りの壁付近にいるかどうかを知ることができない.また,自身の目的としている場所の位置もわからない.
そこで,最大距離30m,270度(センサ正面から左右に135度)の範囲で,物体までの距離を測定可能なレーザレンジセンサ4個をATの前後左右に搭載し,壁との距離を常に一定に保ちながら走行する壁沿い走行を実装した.
現在位置を知る仕組みについては,様々な研究が存在する.現在位置を知る仕組みとして最も一般的なのものがGPS (Global Positioning System)である.しかし,GPS衛星から発信される電波は,建物などにぶつかって屈折・反射するため建物の中での位置測定は困難である.屋内での位置測定手法としては,があるが,壁や家具など障害物が多い屋内環境では電波は屋外の場合以上に屈折・反射をしてしまう.さらに,屋内では様々な電磁波が飛び交うため電波はそれらと干渉し合うことも多く,無線LANによる正確な位置測定は困難を極める.他の屋内位置測定手法に,超音波センサを用いた方法もあるが,この方法では超音波を受け取る受信機を環境側に数多く設置する必要があるため非常にコストがかかる.
本研究では,位置認識のランドマークとなるものとして軽量で電源を必要としないRFIDタグを壁に設置し,タグを読み取ることでATは地図上でのだいたいの位置を知ることが可能となった.
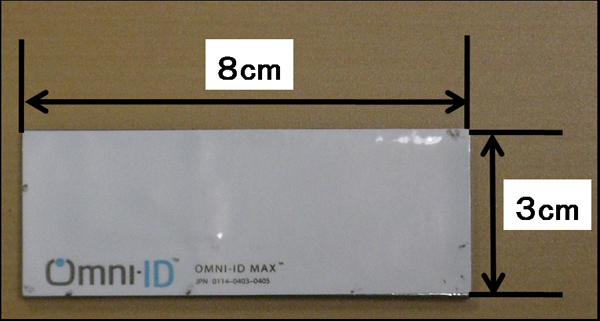
図3.2: RFIDタグ
3.2.2 環境地図
今回使用したRFIDタグを図に示す.RFIDタグは縦3cm,横8cmの長方形の薄いプラスチック板のような形状・質感をしている.非常に軽量で電源を必要としないため,壁沿い走行中の位置把握を目的として壁にいくつか設置しても環境側にかかるコストは低い.また,壁沿い走行する際のランドマークとなるRFIDタグは壁に設置されていることが望ましいため,RFIDタグは基本的に建物内の壁に設置する. それゆえ,そのタグを読み取るためのタグリーダは壁の方向を向いている必要がある.そこで,ATの左右前後に計4つのタグリーダを図のようにATに搭載した. RFIDタグリーダの読み取り可能範囲は可変であるが,ここでは最小範囲にした.それは,読み取り可能範囲が広いと,複数のタグを一度に読み取ってしまい,正確な位置認識が行えなくなるためである. 4方向に取り付けられたタグリーダの読み取り可能範囲は全て等しく設定し,壁に設置されたタグの高さと同程度の高さでATに対して取り付けた.また,全てのタグリーダはそれぞれ固有のIDをもっており, どのリーダがどのIDをもつタグを読み取ったのかを判別することが可能である.
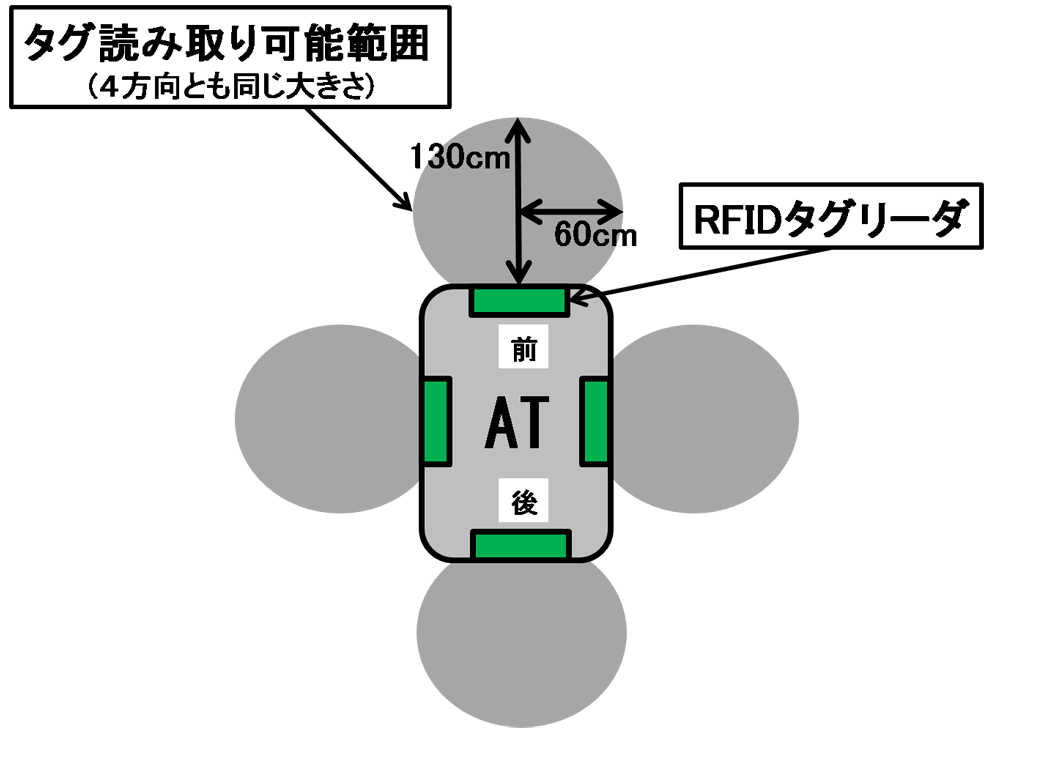
図3.3: RFIDタグリーダの配置と読み取り可能範囲
3.2.3 地図情報
地図情報は環境情報サーバが保持する,サーバが設置された建物内の地形や障害物の位置に関する情報である.それゆえ,環境情報サーバを設置する建物ごとに地図情報を作成する必要がある.地図情報に含まれる情報としては,施設内の各フロアの走行可能な領域,進入不可能な領域,RFIDタグの位置やタグの属性である.地図作成時は,領域の頂点座標とタグの位置座標,属性をデータベースに登録する.属性とは,RFIDタグに付与される情報の一つであり,そのタグの付近の壁に存在する,搭乗者にとって有用な情報の有無を示す.有用な情報とは,例えば,美術館を例として挙げると,展示作品のことである.壁に有用な情報が存在する場合,ATは搭乗者がその情報を閲覧できるようには壁側を向きながら走行する.
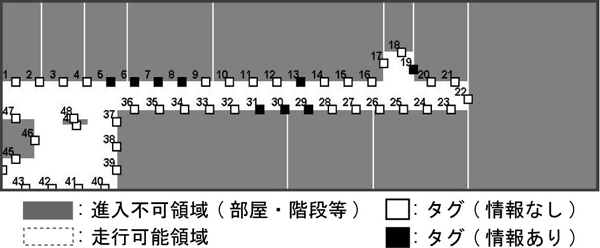
図3.4: 地図情報
3.3 自動走行を開始するまでの手順
3.3.1 移動体とサーバ間の通信
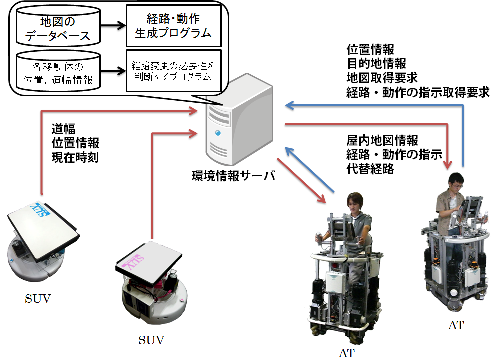
図3.5: AT,SUV,環境情報サーバの通信形態
個人用知的移動体と4章で述べる小型無人移動体の連携を行うための通信形態を図に示す.
環境情報サーバは,ATからの地図情報や経路情報の要求があると地図のデータベースを基に経路を計算してATに地図情報や経路・動作の指示情報を返信する.
また,環境情報サーバは建物内を走行しているATのIDや現在位置等を保持している.移動体がRFIDタグを読み取った時に環境情報サーバに情報を送信すると,環境情報サーバ内に保持されている,該当する移動体に関する情報が更新される.
他にも環境情報サーバは建物内を走行している各ATの自動走行経路や車体の幅といった情報も保持している.SUVから送られてきた道幅に関する情報を用いて,ATごとに自動走行の経路を変更すべきかどうかといったことを判断する.このとき,ATの幅よりも道幅が狭く,ATがその場所を通れないため,経路を変更すべきだと環境情報サーバが判断した場合は,そのATに対して自動走行経路を変更するように要求することができる.この詳細については4章で述べる.
3.3.2 自動走行を開始するまでの手順
図に搭乗者が目的地を入力してから自動走行を開始するまでの手順を示す.
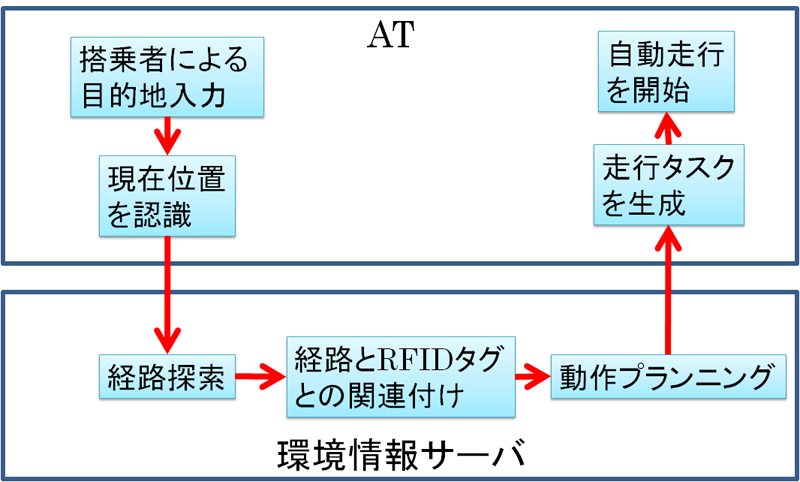
図3.6: 自動走行を開始するまでの手順
走行開始までの手順は大きく3つの段階に分けることができる.1つ目の段階は搭乗者による目的地の設定と,現在位置の認識,2つ目は環境情報サーバによる経路生成と動作プランニング,そして3つ目は走行タスクの生成である.1つ目と3つ目の段階はATの内部で処理される内容で,2つ目は環境情報サーバ内で処理される内容である.
3.4節では自動走行を開始するための現在位置認識について,3.5節では経路生成と動作プランニングについて,そして3.6節では走行タスクの生成について詳細に述べる.
3.4 自動走行を開始するための現在位置認識
3.5 経路生成と動作プランニング
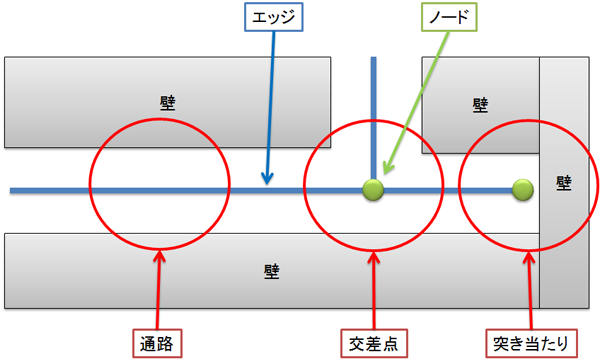
図3.7: 経路生成する際に用いるエッジとノード
図に例を示す.図(a)のような地図があり,現在地を点A,目的地を点Bとする.ここで点Aから点Bまで同じ道を通らずに移動するためには,図(b),図(c),図(d)という3通りの行き方がある.これらの候補の中で現在位置から目的地までの距離がより短く,かつ通行できない場所を経由しない経路,ここでは(b)を採用する.採用されなかった経路,ここでいう(c)と(d)は,選択された経路(b)が通行止めによって走行できなくなった時の代替経路として使用できるように,環境情報サーバ内で保持する.
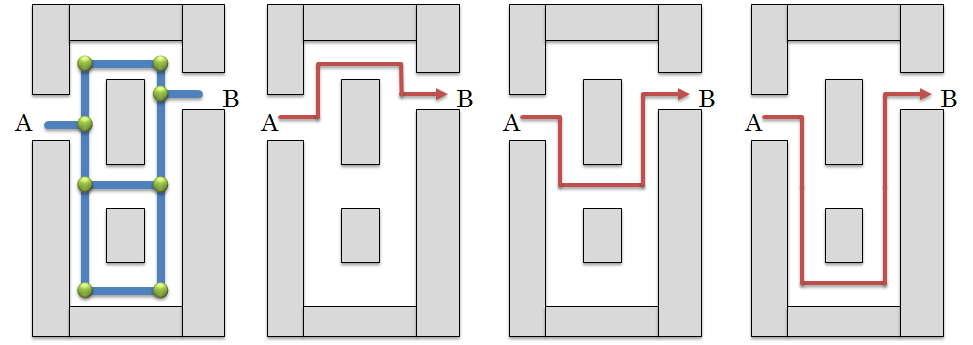
図3.8: 地図の例(a)と点Aから点Bに移動するための経路の候補(b)(c)(d) (左から順に(a)(b)(c)(d))
次に,採用された経路をRFIDタグと関連付ける.この段階では,採用された経路を走行するためにRFIDタグをどの順で辿り,どのタグとどのタグの間で交差点の右左折を行うかというような情報をまとめたリストを生成する.
その後,動作プランを決定する.動作プランとは図に示す6つの各タグ間の基本動作を組み合わせたものである.隣接するタグ間の基本動作は地図情報から算出可能で,これらと経路を組み合わせることにより自動生成される.図の1?5の5つの基本動作にはそれぞれ進行方向があり,それらをつなぐための動作として6番目の「その場回転」動作を含む.ゆえに,右左折時あるいはタグの属性や開始位置における向きによって,「その場回転」動作をプランの適切な位置に加えるプランニングを行う.
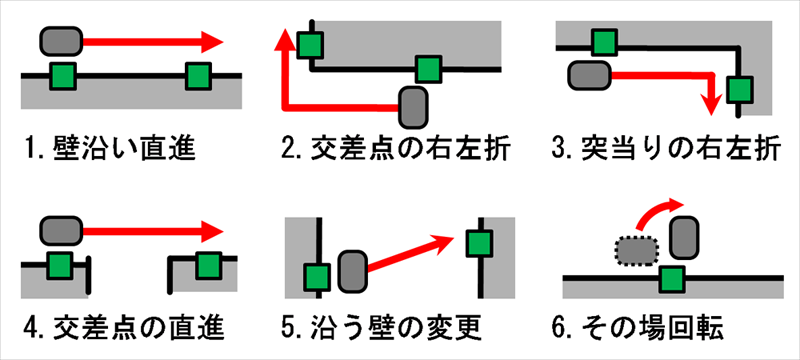
図3.9: 6種類のタグ間の基本動作
プランニングの例を図に示す.図のように自動走行の開始位置と目的地を設定し,図中のStartの位置に示したアイコンの向きで走行を開始した場合,まず突当りの左折動作(図-3)を行い,直後に交差点右折動作(図-2)を行う.次に,壁沿い走行の手掛かりとする壁を変更(図-5)する.その後は,壁沿いを直進(図-1)し,タグID36の次にある交差点で左折する際は左折後のことを考慮し,その場回転動作(図-6)で向きを変更する.最後に突当りを右折して,壁沿いを走行し目的地に到着するというプランが生成される.
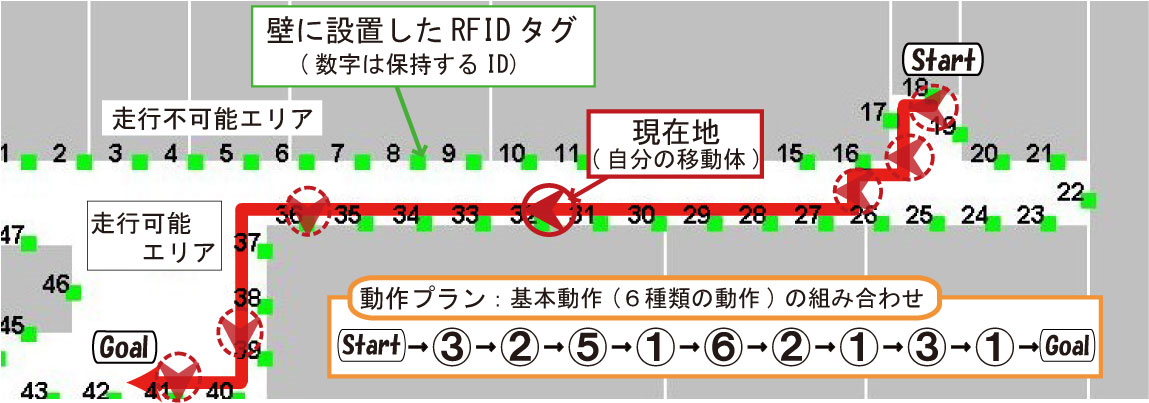
図3.10: 動作プランニング
ここまでで述べた,RFIDタグと交差点や突当りに関する情報のリストと,プランニングにより生成された動作リストをまとめたものをATに送信する.ATは環境情報サーバから送信されたリストを基に自動走行する.具体的な自動走行の実現方法については次節にて述べる.
3.6 自動走行の実現方法
前節では屋内自動トランスポーテーションにおける経路の生成方法および動作プランニングの方法について述べた.本節では,環境情報サーバによって生成された経路や動作に関する情報を利用した自動走行の実現方法について述べる.
環境情報サーバはATから送信された出発地と目的地までの最短移動経路を計算し,それを基に出発地から目的地までどの交差点で曲がるかなどの情報をまとめたリストをATに返信する.
ATはこのリストを基に,自身を制御するための命令群を生成する.この命令群のことを走行タスクと呼ぶ.走行タスクはプロセスと呼ばれる5 種類の動作の単位に分割される.
各プロセスを組み合わせることで基本動作を実現しており,各基本動作に対するプロセスの組み合わせは決まっているため,走行タスクは動作プランから一意に決定可能である.ATによる自動走行は,走行タスクを構成する各プロセスをシーケンシャルに処理することによって実現可能である.
3.6.1 走行タスクの生成
走行タスクは,表に示すATのモータを制御する5種類のプロセスを組み合わせたものであり,動作プラン中の図に示す各基本動作は,これらのプロセスを組み合わせることで実現される.環境情報サーバから受信した現在位置から目的地までの動作プランのデータを基に,ATは走行タスクを生成する.
まず表に5つのプロセスのそれぞれの概要を示し,その後それぞれの動作について詳細に述べる.
【ApproachWall】
前述した通り,ATは自分の位置を把握することと,RFIDタグの読み取りを行うために壁に接近しなければならない.ApproachWallでは,指定した角度の範囲内に存在する壁に対して,指定した距離まで移動する.ATと壁との距離が指定した距離よりも遠い場合はATは壁に接近し,逆にATと壁との距離が指定した距離よりも近い場合は,ATは壁から離れる.
【parallelToWall】
ATは,壁沿い走行を実現するために,壁と平行にならなければならない. ParallelToWallは壁を目印にしながら自身と壁が平行になるように回転する.ParallelToWallは,壁沿い直進前に壁とATを平行にするときや,その場回転をするときに用いられる.
【MoveWithTag】
自動走行をする際,ATは地図における自身の位置を把握しなければならない.自身の位置を把握していなければ,現在どこを走行しているかが分からないため,目的地まで到達することができないからである.我々は,ATが自身の位置を把握するために,環境にRFIDタグを設置している.ATがRFIDタグを読み取ることによって,目的地までの経路の作成や,交差点右左折などのきっかけを見つけることができる.走行開始した後は,壁を目印にしながら走行し,停止タグに設定したRFIDタグを読み取るか,AT が突当りの壁に近づくなどして停止するまで走行を続ける.壁沿い走行中は,壁と距離を一定に保って走行しなければならない.そのため,一定時間ごとに壁と平行にしたり,壁と一定の距離をとったりしている.このようにすることで壁と一定の距離(本研究では,経験的に50cmとしている.)を保ったまま壁と平行に移動することが可能である.
【MoveWithDistance】
主に交差点内を走行する時に実行される.上述のMoveWithTagは壁を目印にしながら直進するのに対し,このプロセスでは基本的に壁を目印にせずに直進する.プロセスの終了条件も異なり,MoveWithTagでは目的のタグを読んだ時にプロセスを終了するのに対し,このプロセスでは指定方向の距離が一定以上または一定以内になったかどうかが終了条件となる.このプロセスを利用する交差点右左折についての詳細を次項で述べる.
【Turn】
ParallelToWallと同様に,ATをその場回転させるときに実行する.ParallelToWallとの違いは,このプロセスは壁を目印にせず3軸角度センサの値のみを参考にして回転する点である.周囲に目印となる壁が存在しないときに回転をしなければならない場合はこのプロセスを実行する.
3.6.2 基本動作とプロセスの対応
前節で各プロセスを組み合わせることで基本動作を表現できると述べた.以下では,基本動作と,それを実現するために使用するプロセスを記述する.1つの基本動作に対して複数のプロセスが対応していた場合,左のマス目から順に実行される.
【壁沿い直進】
|MoveWithTag|
MoveWithTagで述べたのと同様に,指定したタグを読むまで前進する.
【交差点の右左折】
|MoveWithDistance|MoveWithDistance|MoveWithDistance|
この基本動作は複雑なため,次節にて詳細に説明する.
【突当りの右左折】
|ApproachWall|ParallelToWall|
まずApproachWallにて突当りの壁に接近し,次にParallelToWallによって次に走行する方向を向く.
【交差点の直進】
|MoveWithDistance|MoveWithDistance|
まず,一つ目のMoveWithDistanceを実行し,沿っている壁側の距離を測定しながら交差点に進入する.壁がなくなったことを認識したら二つ目のMoveWithDistanceに移行する.そのあとは先ほどと同じ方向の距離を測定し,壁の存在を認識したところで交差点の直進を終了する.
【沿う壁の変更】
|ApproachWall|
これまで沿っていた壁と反対側の壁に接近する.
【その場回転】
|ParallelToWall|
ParallelToWallで述べたのと同様に,壁を目印にして回転する.
3.6.3 交差点右左折の実現
交差点右左折は,他の基本動作よりも処理が複雑なため,ここで詳細を述べる.
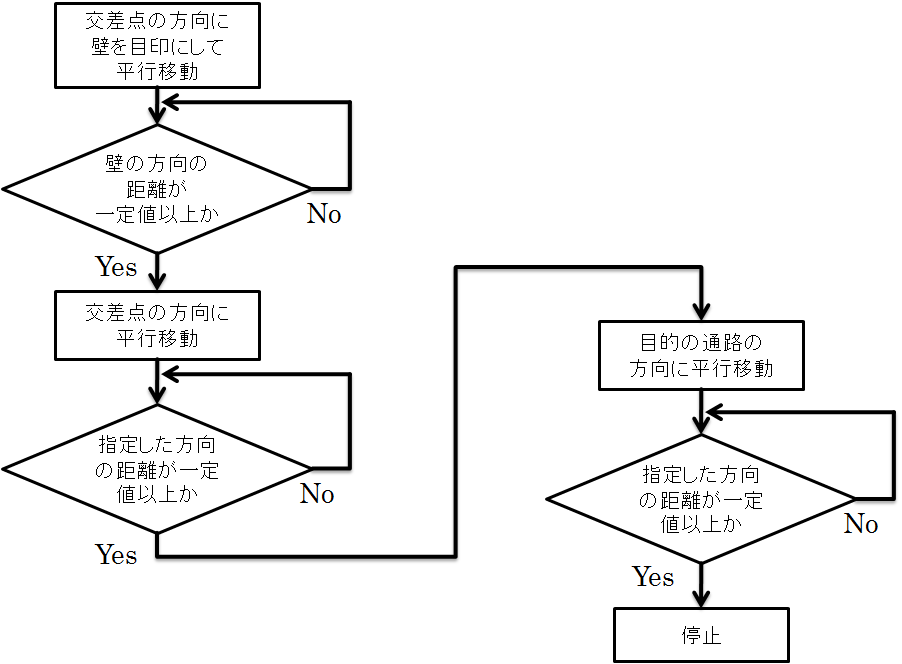
図3.11: 交差点右左折時の処理のフロー
交差点右左折は,前項で述べた,MoveWithDistanceを3回実行することで実現される.交差点右左折の手順を図と図に示す.なお,図中の細い矢印は進行方向を表し,太い矢印は,その方向の距離を計測することを示す.図は,(A)から走行してきたATが交差点を右折して(B)に進む場面である.ATは交差点を右左折する場合,交差点に進入する際に,あらかじめ曲がる方向を向いてから交差点右左折を行う.これは,交差点内にはATの周囲に目印にすべき壁が無くなってしまい,正確に90度回転することが難しくなってしまうためである.また,あらかじめ回転しておくことで,搭乗者に対して,これから交差点右左折を行うことを知らせる目的もある.
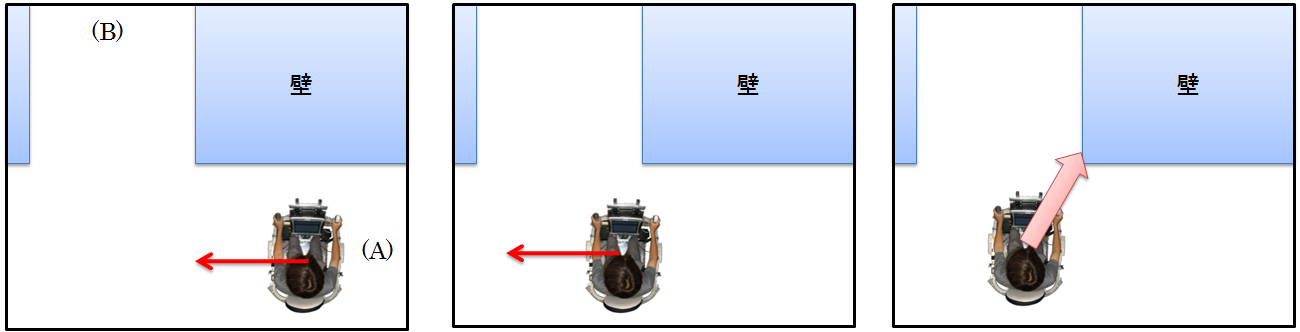
図3.12: 交差点に進入するための手順 (左から順に (a)(b)(c))
図(a)は,交差点進入前にあらかじめ90度右回転した状態である.この状態から1回目のMoveWithDistanceを実行する.ATは交差点の方向に向かって左向きに走行する.次に図(b)では,ATの正面0度の方向から壁が無くなった状態となっている.この時に,1回目MoveWithDistanceを終了する.その直後に2回目のMoveWithDistanceを実行する.この時は,1回目のMoveWithDistanceの時よりもATの速度を落とし,そのまま直進する.その後,図(c)の矢印の方向の距離を確認しながら交差点の中心に近づく.この角度は,経験的に進行方向から壁の存在する方向に向かって120度としている.この距離が一定距離以上になった時に2回目のMoveWithDistanceを終了する.
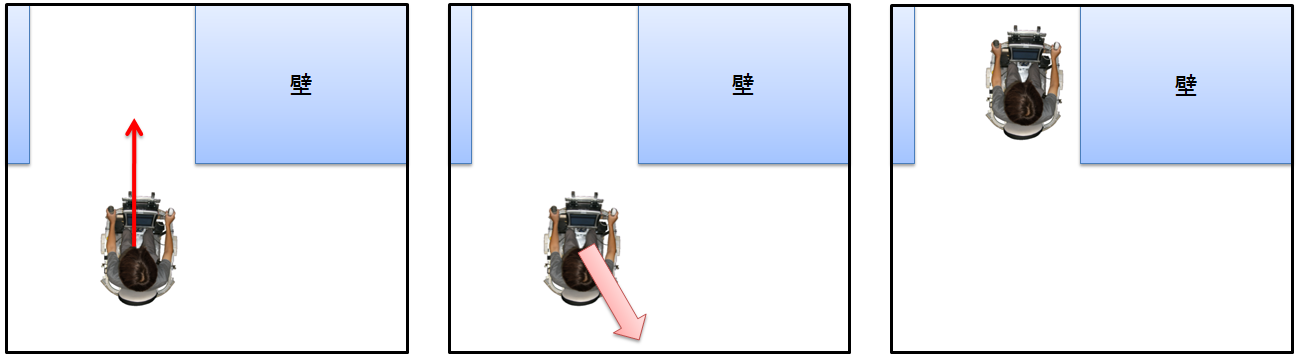
図3.13: 交差点から出るための手順 (左から順に(a)(b)(c))
3回目のMoveWithDistanceでは,まずATは図(a)のように前進する.その際,図(b)の矢印の方向の距離を測定しながら前進する.この角度は経験的に進行方向から壁の存在する方向に向かって165度としている.ATが前進し,図(b)の矢印の向きの距離が一定距離以下になった時に3回目のMoveWithDistanceが終了する.図(c)の状態が,交差点右左折が終了した時のATの位置である.
以上の手順により交差点での右左折を実現している.
3.6.4 自動走行の実行例
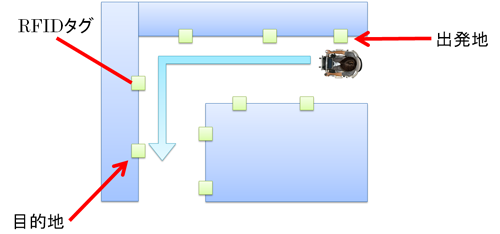
図3.14: ATの自動走行の例
ATは出発地から目的地まで走行するために,まず突当りまで直進し,突当りで左折してから目的地タグを読み取るまで直進する必要がある.
これを基本動作に置き換えると,突当りの直前のRFIDタグを読み取るまで右壁沿い直進,突当りを左折,目的地タグを読み取るまで右壁沿い直進,という3つの基本動作が必要となる.
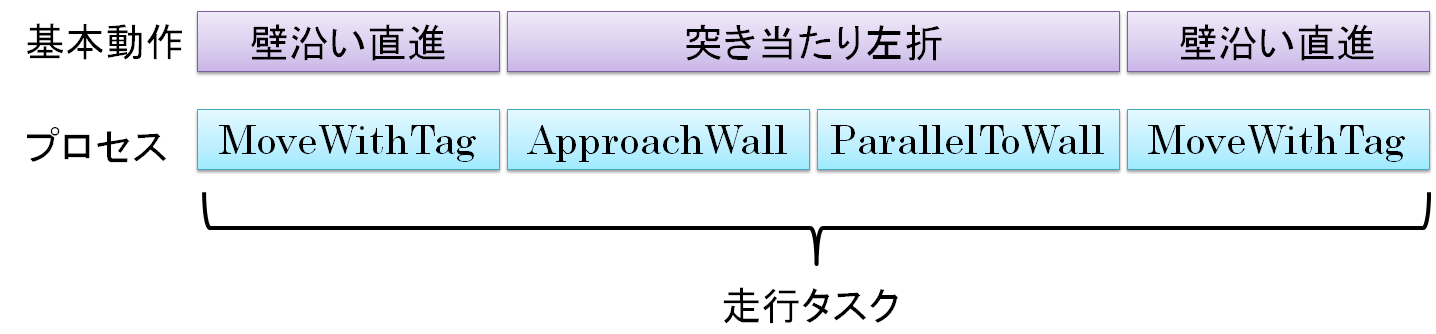
図3.15: 基本動作,プロセス,走行タスクの関係
この基本動作を,ATの内部では走行タスクに変換する.上記の基本動作の場合,図のように,基本動作をプロセスに変換する.これらの最初のMoveWithTagから最後のMoveWithTagまでを1つにまとめたものを走行タスクと呼ぶ.
このように,ATは環境情報サーバから送信される動作プランを,ATを制御するための命令に変換している.
3.6.5 障害物回避
ATは障害物と遭遇した場合,回避行動をとり,障害物を回避する.これは,2.8.2項で述べたレイヤのうち,障害物回避レイヤが有効になっている場合に実行される.

図3.16: 障害物回避のコンソール画面
ATが目的地に向かって自動的に走行している時に障害物がATに接近した場合,障害物回避レイヤはレンジセンサで取得したデータを基に,障害物を認識する.目的地誘導レイヤは常に障害物レイヤの出力値や状態を観察しているため,障害物回避レイヤが障害物を発見したことを知ることができる.障害物回避レイヤが障害物を認識し,回避する場合は,目的地誘導レイヤは目的地に向かうためのモータ制御のための値ではなく,障害物回避レイヤの出力する値を代わりにシーケンサに対して出力する.このようにすることで,ATが障害物を発見した時に即座に回避行動をとることができる.
図は障害物回避時のATのコンソール画面である.中心の矩形がATであり,その上方に存在するのが障害物である.障害物の周りには,ATがそれ以上障害物に接近すると衝突する目安が障害物を囲む矩形で表現されている.ATはその矩形の外側を走行するような走行経路を生成し,障害物回避を行う.ATから上方に伸びている線は走行する予定の経路を表す.
3.6.6 屋内自動トランスポーテーションにおける問題点
ATは,目的地に向かって自動走行している間に障害物と遭遇した場合,回避行動をとることによって障害物を避けることができる.しかし,障害物は必ずしも避けられるものとは限らない.例えば,荷物の搬入などで通路が一時的に塞がれてしまっていたり,混雑によって移動体が通行できない状態になってしまったりする場合である.
このような障害物は一時的に現れるものであるため,壁や階段のようにあらかじめ環境地図に通行できない旨を記載することができない.それゆえ,ATの自動走行の経路を構築する段階では環境地図に通行できないと記載されていない可能性があるため,結果的に通行できない場所を通るような経路を構築してしまう場合がある.ATが自動走行中にこのような障害物に遭遇した場合,回避行動をとっても回避することができないため,来た道を引き返し,環境情報サーバが保持している代替経路から適切な経路を送信するように要求し,経路を変更した後に目的地に向かうことになる.これでは搭乗者にとって時間の無駄になってしまう.そのため,できるだけ早いタイミングで通行できない通路を避けるように走行経路を変更しながら目的地まで向かう必要がある.
しかし,このような一時的な通行止めの存在は,AT単体では事前に知ることができない.なぜなら,ATに搭載されているセンサは自分の周囲の状態を知るためのものであり,これから走行する予定の経路の状態を知るためのものではないためである.そのため,ATに搭載されているセンサ以外のセンサを用い,そのセンサが得た情報からATがこれから走行する予定の経路の状態を事前に知る仕組みが必要となる.
3.7 まとめ
本章では,ATを用いて構築した屋内自動トランスポーテーションとその問題点について述べた.
ATは屋内にいる間は常に環境情報サーバと通信可能である.環境情報サーバは,施設ごとに存在するサーバで,ATに対して環境情報を送信し,ATから受信した現在位置や目的地を基にATの自動走行の経路を生成し,それをATに送信することができる.
ATは自動走行中に障害物と遭遇した場合,障害物回避をすることが可能である.しかし,センサの限界に起因する,屋内自動トランスポーテーションにおける問題点が存在する.それは,例えば,これから走行する予定の経路の状態を知ることができないことである.この問題は,移動体に搭載されたセンサだけでは解決できない.
次の章では,この問題点の解決策の一つとして開発された小型無人移動体について述べる.小型無人移動体の構成や機能について述べた後,ATと小型無人移動体の連携について述べ,小型無人移動体を導入したことによる,ATの自動走行の効率化について行った実験について述べる.
4 小型無人移動体による環境探索
4.1 小型無人移動体(SUV)
本研究では,自律走行して環境を巡回する小型無人移動体(Small Unmanned Vehicle,以下SUV)を2台作成した(図).SUVは事前に環境を走行することにより環境地図を生成する機能を持ち,その地図を利用して自己位置の推定を行う.環境地図を用いて,自分の現在地を認識することができるため,比較的柔軟な自律走行が可能である.また,地図と現在のセンサの値を比較することで,人間などの地図には存在しない障害物を認識することが可能である.
本章では,SUVのコンセプト,SUVの構成,SUVが持つ機能である地図生成,自己位置推定,自律走行について説明する.さらに,環境探索した結果得られる情報の一つとして道幅について注目し,道幅の測定精度の検証を行った.最後に,その詳細について述べる.

図4.1: 小型無人移動体 rosa と azul
4.1.1 SUVのコンセプト
SUVは自律走行可能な無人の移動体である.SUVは現状では2種類の運用形態が実現されている.
一つは,環境内を巡回させてセンサ情報をサーバに送り続ける形態である.もう一つは,特定の個人用知的移動体の進行方向を先行して走り,後続する個人用知的移動体の拡張センサとしての機能を果たすことに重点を置いた形態である.
前者は比較的,環境設置型のセンサの運用形態に近い.大きく異なるのは,センサが移動するという点である.小型無人移動体が個人用知的移動体とは基本的に独立して環境中を巡回し,センサ情報を逐次サーバに送信する.サーバは環境内に存在する全ての移動体を管理しているため,送信されたセンサ情報から,走行中の個人用知的移動体が走行を継続できるかどうかを判断する.この詳細については次章で述べる.
後者は個人用知的移動体のセンシング領域を拡張するための運用形態である.例えば,個人用知的移動体が交差点に差し掛かる時,先に交差点に接近しレーザレンジセンサにより交差点内のセンサ情報を取得する(図).個人用知的移動体は小型無人移動体から送信されてくるセンサ情報を自身のレーザレンジセンサで取得したセンサ情報と重ね合わせて,衝突しないように待機するかどうかを判断する.
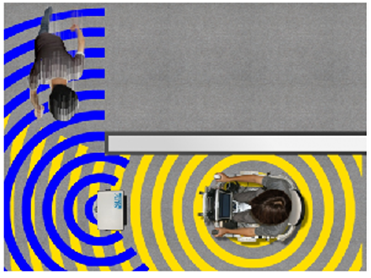
図4.2: 小型無人移動体による死角からの移動障害物の検知
4.1.2 SUVの構成
SUVは,ベースとなる移動体として二輪走行機構,後方を走るATを認識するためのCMOS赤外線センサを3台,SUVの向きを精度よく計測するための角速度センサ,障害物を認識するためのレーザレンジセンサ,現在地を認識するためのRFIDタグリーダ,そしてそれらを制御するためのノートPCから構成されている(図).
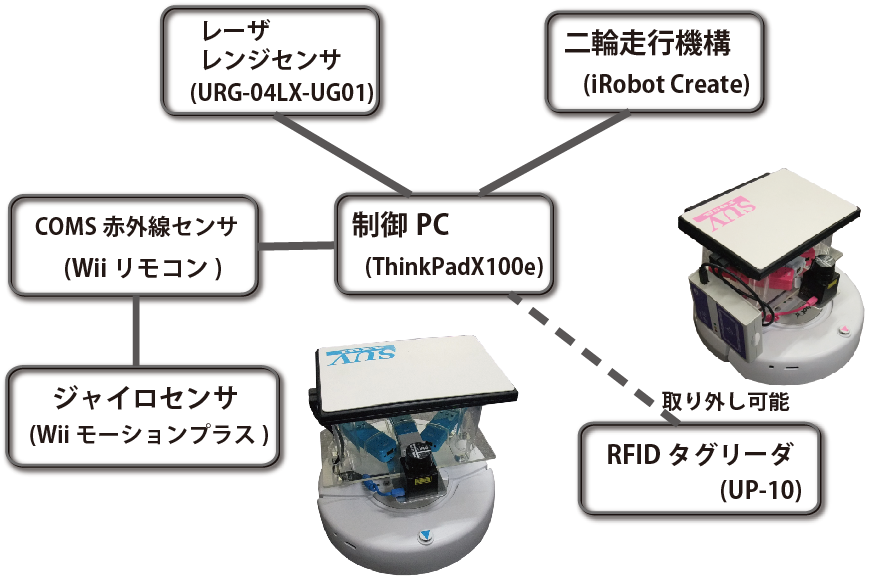
図4.3: SUVの構成
次に二輪走行機構,CMOS赤外線センサ,角速度センサ,レーザレンジセンサ,RFIDタグリーダについて説明する.
4.1.3 二輪走行機構
SUVはベースとなる移動体としてiRobot社のiRobot Createを使用している.iRobot Createは,お掃除ロボットとして知られるRoombaをベースとした,教育・開発者向けのプログラム可能なロボットである.iRobot Createはサーボモータによって独立に動く二つの車輪を持ち,これにより前後移動・その場回転・カーブ移動が可能である.速度は-500?500mm/sまで出すことが可能である.また,二つのタイヤの回転数を内部で計算することによって,走った距離と回転角度(オドメトリ情報)を知ることができる.しかし,このオドメトリ情報は必ずしも正しい値ではなく,誤差を含む値である.モータの回転数が高出力の時と,低出力の時の誤差は特に大きく,出発地点からの相対位置を知るためには不十分な精度である.これについての問題解決の方法としてジャイロセンサを使用した.詳しくは4.1.5項で述べる.また,iRobot Create本体に様々なセンサが標準で搭載されている(図\ref{fig:SUVSensor}).バンパーセンサ,ホイールセンサ,PSDセンサ,IRレシーバである.このうち,バンパーセンサはSUVの前面の左右にそれぞれ持ち,進行中に右のバンパーセンサが反応したら左へ回転し軌道を修正するなど,このセンサの値によってSUVの動作を決定することができる.また,壁と衝突した時の衝撃を吸収してくれる.ホイールセンサはタイヤが地面に着いているかを調べるセンサである.タイヤが地面に着いていない時は,制御PCの信号を無視して必ずモータの回転を停止する機能を持つ.PSDセンサはiRobot Createの側面の壁との距離を測ることができるが,SUVはレーザレンジセンサによって,広範囲の障害物までの距離を測定可能なため,本研究ではPSDセンサは使用しない.
IRレシーバは赤外線の信号を受信することができるセンサである.これによりiRobot Createに付属するリモコンから命令を送信することが可能である.
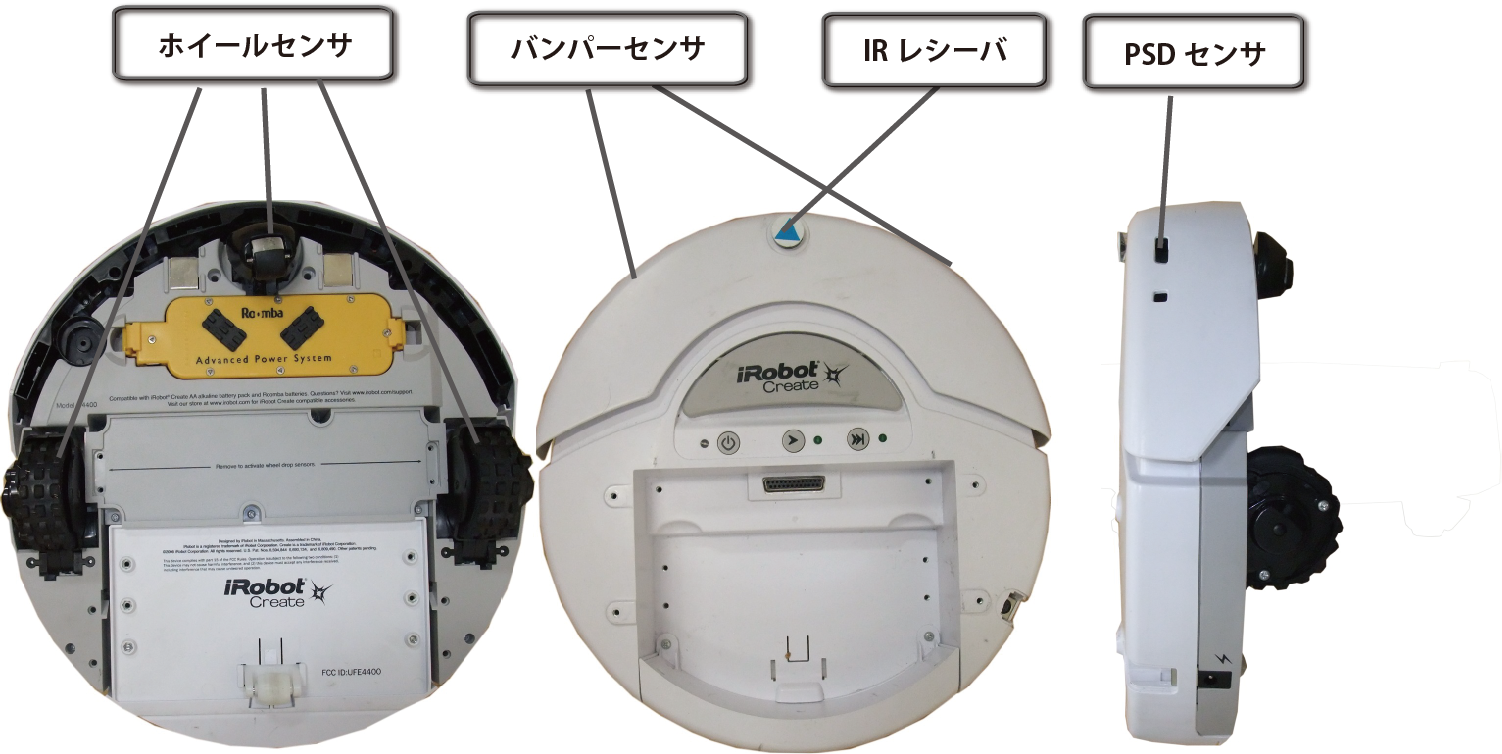
図4.4: iRobot Create のセンサ
4.1.4 CMOS赤外線センサ
SUVはCMOS赤外線センサとしてWiiリモコンを3台搭載している.Wiiリモコンとは任天堂から販売されている家庭用ゲーム機Wiiで使用可能なゲームコントローラである.
Wiiリモコンの先端には赤外線LEDを認識するために使われるCMOS赤外線センサが搭載されている.このセンサは赤外線LEDだけを写すカメラであり,写されたLEDの光をWiiリモコン内部で処理することで,Wiiリモコンの出力として赤外線の座標を取得することが可能である(図).標準で最大4つまでのLEDの座標を取得することができる.LEDを一定間隔に並べておくことで,Wiiリモコンはその光源までの距離を計算することができる.SUVではこの技術を応用し,SUVとATの距離を測ることに利用した.2.11.3項で述べた通り,ATには赤外線LEDが前後左右に1個ずつ搭載されているため,SUVはこれらのLEDから発せられる赤外光を利用する.また,WiiリモコンのCMOS赤外線センサは視野角が狭く,約20度である.そこで,WiiリモコンをSUVに3台搭載することによって視野角が広くなり,ATの検出がしやすくなる.WiiリモコンはBluetoothによる通信が可能であり,SUVに搭載されている制御用PCと通信を行う.
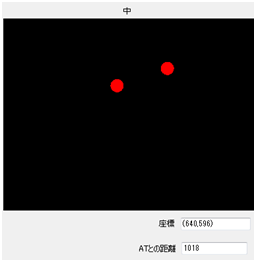
図4.5: SUVのカメラで認識されたATの赤外線LED
4.1.5 ジャイロセンサ
SUVはジャイロセンサとしてWiiモーションプラスを搭載している.Wiiモーションプラスはジャイロセンサを含むWiiリモコンの拡張デバイスで,Wiiリモコンの下部に装着することでジャイロセンサの値である角速度をWiiリモコンから取得可能となる.ジャイロセンサは物体が回転する際のコリオリ力を計測することで角速度を計測することができるセンサである.デジタルカメラの手ぶれ補正機能などでも使われているなど,微小な回転にも反応することができる.4.1.3項で説明したように,iRobot Createのオドメトリ情報の精度は十分ではなく,特にSUVを高速で指定した角度だけ回転させようとする時に大きな誤差がでてしまう.SUVの向きがずれると位置推定に大きな誤差がでてしまうためWiiモーションプラスを使いこの精度を向上させた.このWiiモーションプラスから取得できる角速度を積分することでSUVの回転角を求めることができる.
4.1.6 レーザレンジセンサ
SUVには2.8節で説明したものと同じレーザレンジセンサが搭載されている.ただし,ATに搭載されているレンジセンサよりも計測距離が短く,最大5.6m先の障害物を検知することができる.また,レンジセンサが4台搭載されているATとは異なり,SUVに搭載されているレンジセンサは1台のみである.このため,SUVの周囲360度の情報を取得することはできず,前方240度が検出領域である(図).本研究ではSUVはATの前方を走行しており,後方の障害物との距離を計測することができないため,ATとの距離を知ることができない.しかし,4.1.4項で説明したような仕組みでATとの距離を測定するため問題ない.
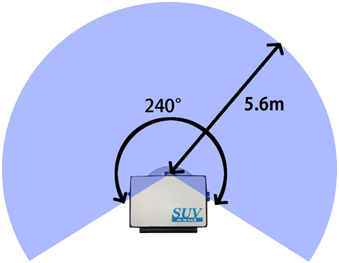
図4.6: レンジセンサの取得可能範囲
4.1.7 RFIDタグリーダ
SUVには2.8節で説明したものと同じRFIDタグリーダが搭載されている.ATに搭載されているRFIDタグリーダよりも取得可能なRFIDタグまでの距離が短く,SUVが走行中に読み取れる有効範囲は10cm?20cmまでである(表3).また,RFIDタグリーダはSUVから着脱可能である.RFIDタグリーダはATと同様に,自分の現在地を認識するために使用される.
UP-10を一定の間隔と一定のスピードで,\\RFIDタグの前を走行させたときの読み取りの可否 ○:読み取り可能△:読み取り不可の場合あり×:読み取り不可
4.2 地図生成
SUVはATに自分のセンサ情報を送ることでATのセンシング領域を拡張することが可能である.ATにとって知りたい情報とは,人間などの移動障害物や地図上に現れない障害物などの情報,つまり地図との差分である.地図との差分を知るためにはSUVのセンサによる地図情報を前もって作成しなければならない.移動体の地図生成はSLAM問題として知られる.その問題に対して,.図にSUVが生成した地図の例を示す.

図4.7: SUVが生成した地図
4.3 位置推定と自律走行
SUVは4.2節で生成した地図情報,レンジセンサで取得した距離情報,オドメトリ情報を利用することにより位置推定を実現している.図は生成した地図に現在のレンジセンサで取得した距離情報をマッピングしたものである.水色の部分は地図情報,青色の部分はSUVに搭載されたレンジセンサで取得した距離情報,オレンジ色の円はSUVを表す.
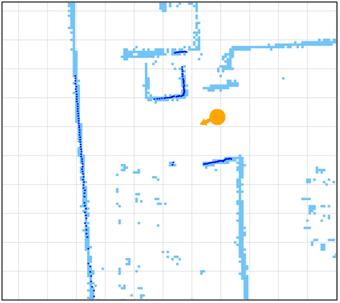
図4.8: 生成した地図にレンジセンサの情報を重ねたもの
また,SUVには環境中を巡回してセンサ情報を取得する役割や,ATの拡張型センサとしてATを先導し,ATから死角となるような領域を監視する役割があるため,自律走行の機能が実装されている.また,前述のRFIDタグリーダによりRFIDタグを読み取ることにより,位置の補正をすることが可能である.
4.2節で生成した地図にノード情報を追加して,SUVが進行可能なノード間を結ぶことで,地図は進行可能な通路情報を意味するグラフ構造になる(図).さらにノードとRFIDタグのIDを関連付けることで,SUVは,RFIDタグの座標に基づくATの経路情報を自身の地図情報と結び付けることができる.図はATが保持する地図(左)とSUVが生成した地図(右)のうちの一部である.図右の円形の中に書かれている数字はRFIDのタグ番号を示す.両者ともRFIDが同じように地図に関連付けられていることが分かる.SUVを巡回させる場合,これらのノードのうち巡回経路に該当する場所を選択することにより,SUVに環境中を巡回させることが可能となる.なお,本研究ではグラフ構造は人間の手によって追加される.地図生成時にSUVが実際に走った経路や,地図情報の形から自動的にグラフ構造を生成するべきであるが,これは今後の課題である.
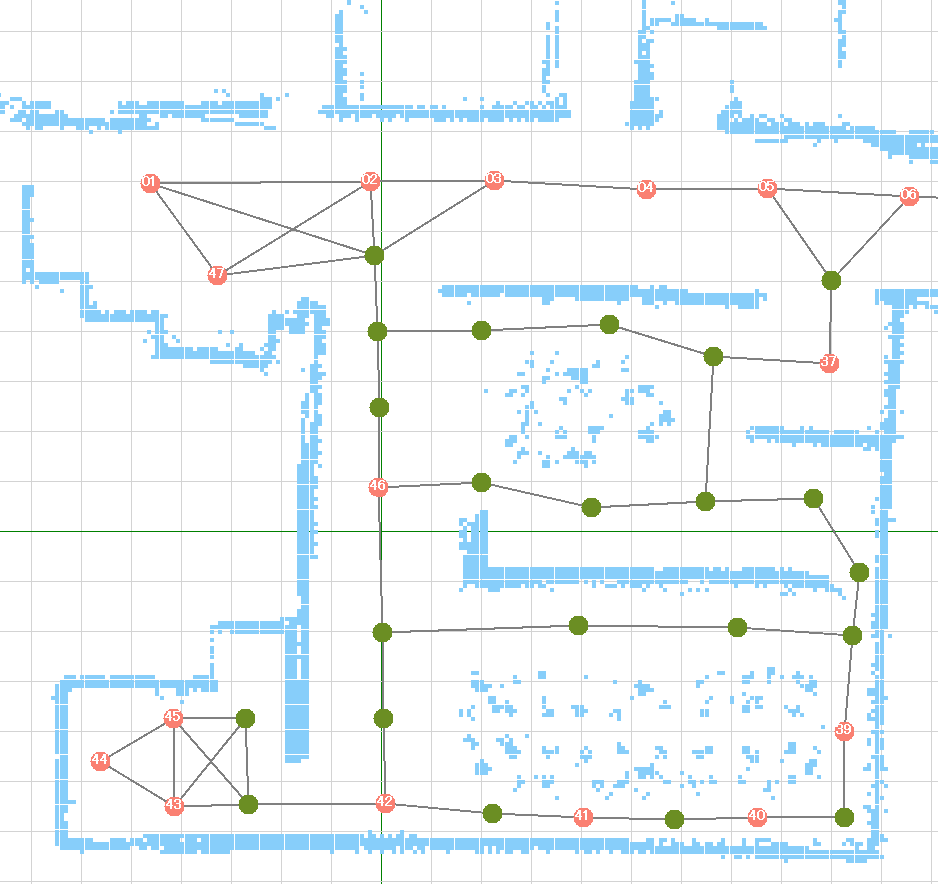
図4.9: グラフ構造を持つ地図
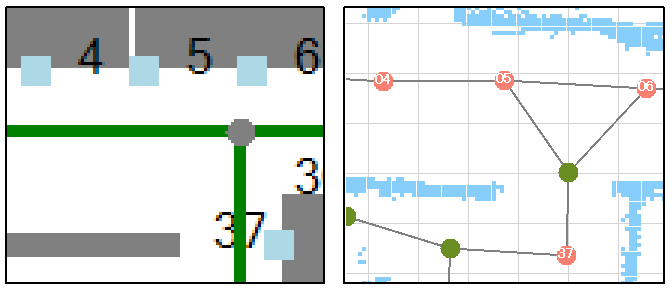
図4.10: ATが保持する地図とSUVが生成した地図
SUVは現在位置から次のノードに向かうようにその場回転により向きを変えて,次のノードまでの距離だけ直進する.指定距離分を直進したら,現在地が目的のノードの位置とずれていてもそのノードに到達したとして,さらに次のノードに同様の方法で向かう.
4.4 環境探索
SUVは屋内を自律走行し,環境情報を取得することができる.SUVには無線LANによる通信機能が搭載されているため,他の移動体や,3章で述べた環境情報サーバと情報のやり取りをすることができる.
環境情報サーバは建物内に存在する全てのATやSUVと接続されており,常に通信できる状態にある.ATが環境情報サーバから送信される情報を利用して自動走行していることは3章で述べた.SUVからの情報によって,環境情報サーバは屋内の様子を知ることができる.それにより,環境情報サーバはATに対して適切な指示を出すことが可能になる.例えば,ある通路は行き止りなので,別の経路を走行させるというような指示である.
SUVは屋内を,ATとは独立に自律走行し,逐次センサ情報を取得してサーバに送信する.1つのフロアをいくつかの領域に分割し,その領域内に1台のSUVを割り当てる.SUVは,割り当てられた領域を巡回し,その領域内の情報を環境情報サーバに送信する.環境情報サーバは,情報を送信したSUVの位置情報を基に,環境情報サーバが保持する環境地図に,SUVから提供された情報を書き込む.現在のところ,SUVの位置情報は屋内の壁に貼られているRFIDタグのIDであり,SUVが提供する情報は道幅となっている.
一つのフロアをいくつに分割したら最も探索効率が良いかという問題については,次章で検証する.
4.5 道幅を測定するための障害物までの距離
SUVの導入によりATの自動走行の効率化を実現できるかどうかを検証する前に,SUVが正しく環境を認識できるかどうかを検証する.実世界における問題では,理論的に正しくアルゴリズムが機能していたとしても,センサで得られたデータの誤差により,正しく動作しない可能性がある.そのため,SUVが実際に自律走行しながら環境認識を行った場合に,ATの自動走行を効率化するという目的を達成するのに十分な精度が得られるかどうかを判断するための実験を行った.
4.5.1 実験環境

図4.11: 実験環境
廊下の途中に,SUVから見て右側の壁から1m離れた地点に障害物を置いた.今回はこの1mという値を正解データとして実験を行う.この数字は,ATが走行する場合に通過できる限界の道幅である.
SUVはあらかじめ廊下の地図を作成しており,廊下での位置推定を行うことができる状態となっている.実際に作成された地図を図に示す
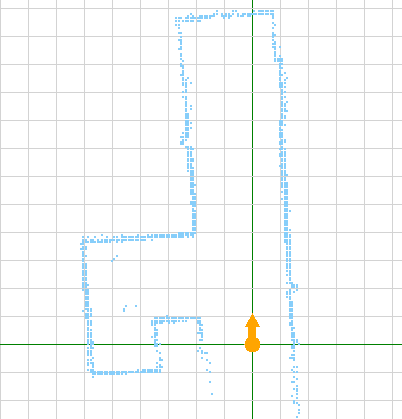
図4.12: 実験で使用した環境地図
4.5.2 実験内容
今回の実験では,まず,SUVは位置推定を行いながら自律走行し,指定された条件で障害物を発見した時にそこで停止する.指定された条件とは,SUVの中心から障害物までの距離が1m, 75cm, 50cm, 25cmのいずれか以下となることである.事前調査で,この距離が1m, 2m, 3m の場合のそれぞれで道幅を測定した結果,測定位置が障害物に近いほど測定結果の精度が良くなるという結果が出たため,今回は,事前調査で最も精度が良かった1mの場合を含めSUVが障害物に接触する直前の距離である25cmまで25cm刻みで測定することにした.
次に,SUVが停止した後,図に示した道幅を10回測定し,それらの平均値を1回の測定結果とした.さらに,これを1m, 75cm, 50cm, 25cmのそれぞれについて50回ずつ測定した.
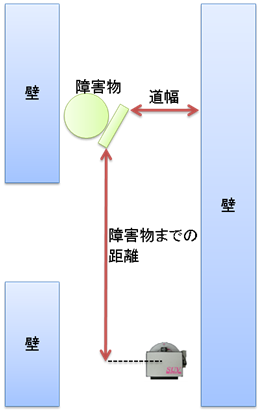
図4.13: 実験環境におけるSUVと障害物の位置関係
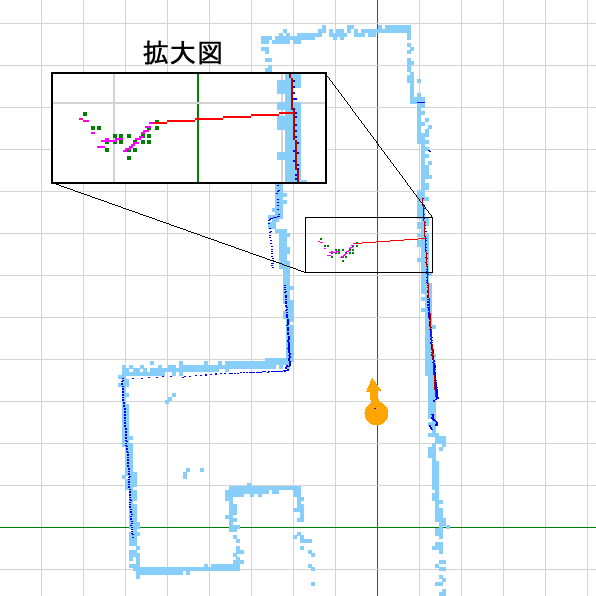
図4.14: SUVが作成した環境地図
SUVが走行しているときの地図情報,およびレンジセンサで取得した情報を描画したものを図に示す.
この図の水色の部分が,SUVがあらかじめ作成した地図データである.図の中心付近に存在する矢印付きの円はSUVを表し,矢印は進行方向を表す.SUVの進行方向上に存在する点の集合および線分は障害物および,計測の対象となっている道幅を表す.図中に,障害物周辺の拡大図を示した.青色の部分は,現在,SUVのレンジセンサで取得しているデータである.ピンク色の部分は,現在,SUVのレンジセンサで取得しているデータの内,あらかじめ作成した地図データにはない部分である.今回は,このピンク色の部分のデータの中で,SUVの進行方向上に存在し,右側の壁と最も近い点と壁との距離が最も短いものを道幅としている.つまり,図の赤色の水平の線分の長さを道幅とする.
その後,障害物が1m以内の場合,75cm以内の場合,50cmの場合,25cmの場合に測定した50個ずつの道幅と正解データの差分を求め,その平均値と分散値を求めた.
そして,精度を比較するために1mの場合から25cmの場合のまでの4つの分散値を比較した.
4.5.3 実験結果
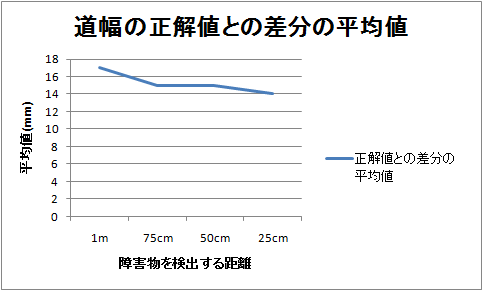
図4.15: 障害物までの距離ごとの正解データとの差分の平均値
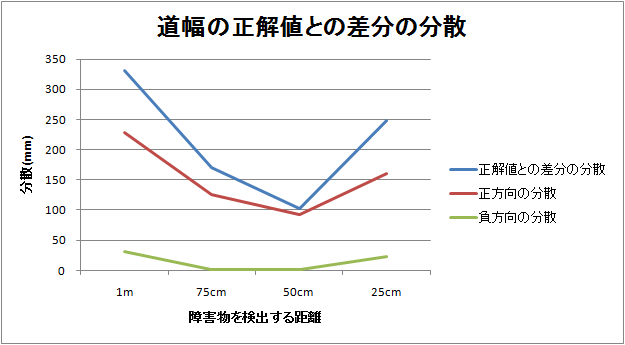
図4.16: 障害物までの距離ごとの正解データとの差分の分散
図に障害物までの距離ごとの,正解データとの差分の平均値を比較するグラフを示し,図に障害物までの距離ごとの,正解データとの差分の分散を比較するグラフを示す.全ての場合において実際よりも道幅は広めに測定されたことが分かる.また,正解データとの差分の分散,および正解データよりも測定値が大きい場合の差分の分散,正解データよりも測定値が小さい場合の差分の分散と,すべてにおいて50cmが最も誤差が小さいという結果が得られた.
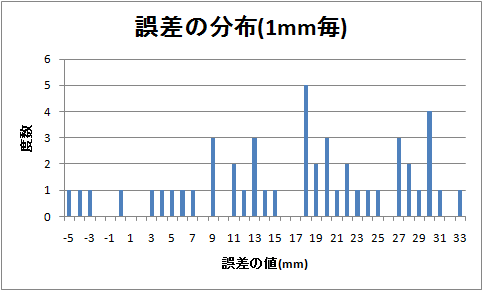
図4.17: 道幅の誤差の分布
誤差の値が0mmの場合が,正解データと一致することを示す.
SUVが50cm以内に障害物を検出した時に測定した道幅の誤差は,-5mmから+33mmの間に分布していることが分かる.
4.5.4 考察
事前調査により,SUVはより近い距離から測定したほうがより高い精度で道幅を測定できると考えられていた.距離が遠い場合は,レンジセンサの分解能が原因による誤差によって値にばらつきが出て,距離が近いほどレンジセンサの分解能の影響を受けにくいことからもそのように考えられる.
しかし,25cmの時は分解能による誤差が最も小さいと考えられるはずだが,実際は75cmの時の誤差よりも大きい.これは,25cmの時は分解能が原因ではなく,障害物との位置関係により正しく測定できない場合が存在したためである.障害物のうち,最も壁に近い部分を通過してから道幅測定を行った事例があったため,正解データに比べて誤差が大きくなってしまった.このことから,実運用する際も障害物の見落としを防ぐために,障害物に近づきすぎない距離で道幅を測定する必要があると考えられる.
最も精度の良かった50cmの場合は-5mmから33mmの間に誤差が分布していた.ここではこの誤差が自動走行の効率化に与える影響を調べることができないため,別の実験で,この値が許容できるかどうかを確認する.
4.6 まとめ
本章では,個人用知的移動体ATの自動走行を効率化するための仕組みの一つとして,屋内を探索して環境情報を取得する小型無人移動体(SUV)について述べた.SUVは自律走行しながら環境中のセンサ情報を取得し,その情報を環境情報サーバに送信することが可能である.
また,ATの自動走行の効率化のためにSUVが取得すべき情報の一つとして,道幅に着目した.道幅を知ることによって,ATがその道を通れるか通れないかを判断することができるためである.また,SUVが道幅を測定するときに発生する距離の誤差を実験により求めた.ここで得られた誤差の分布を自動走行の効率化の検証に活かす.
次章では,SUVを用いたATの自動走行の効率化について述べる.
5 個人用知的移動体の自動走行の効率化
前章にて,SUVによる環境探索について述べた.SUVは環境を巡回し,障害物を発見した時に道幅を計測した後,環境情報サーバに道幅の情報を送信する.
本章では,SUVによって収集された道幅の情報を基に環境情報サーバがATの走行経路を動的に変更することで,ATの自動走行を効率化する仕組みについて述べる.
5.1 自動走行の効率化手法
動的環境における自動走行の効率の問題を解決する手法として,本研究では以下の2つを検討した.
- 経路変更の効率を上げること
- 環境の変化を知るタイミングの遅れを減らすこと
本節ではこれら2つの手法について述べるとともに,ATの自動走行の効率化を図るために実現した仕組みについて述べる.
一つ目の「経路変更の効率を上げること」については,3.5節にて述べた,出発時に複数の経路を生成することにより実現されている.搭乗者が目的地を設定した後,ATは環境情報サーバに対して出発地と目的地を送信する.環境情報サーバは環境地図を基に出発地と目的地の2点を結ぶ経路を生成する.ここで,最短経路しか算出しなかった場合,経路の途中が行き止まりになっており,経路を変更せざるを得ない状況になった時に再度最短経路を計算しなければならない.この場合,通行止めの現場に遭遇するたびに経路計算を行わなければならず,広いフロアならば特に経路の計算に時間がかかってしまう.そこで,環境情報サーバでは,最初にATの出発地と目的地が送信されてきた時に,最短経路だけを求めるのではなく,あらかじめ代替経路となるような経路も含めて生成し,保持しておく.ATが通行止めの現場に遭遇した時に,保持している経路の中でその場所を通り,かつ通行止め状態のエッジを通らない経路の中で最短のものを選択し,それに変更する.その場所を通って目的地に向かう経路が存在しない場合は,来た道を,候補となる経路が現れるまで遡る.障害物を発見してから経路を変更するまでのフロー図を図に示す.
図中のノードとは,3.5節で述べたノードと同じものであり,実世界における交差点・袋小路・T字路,L字路に当たる.
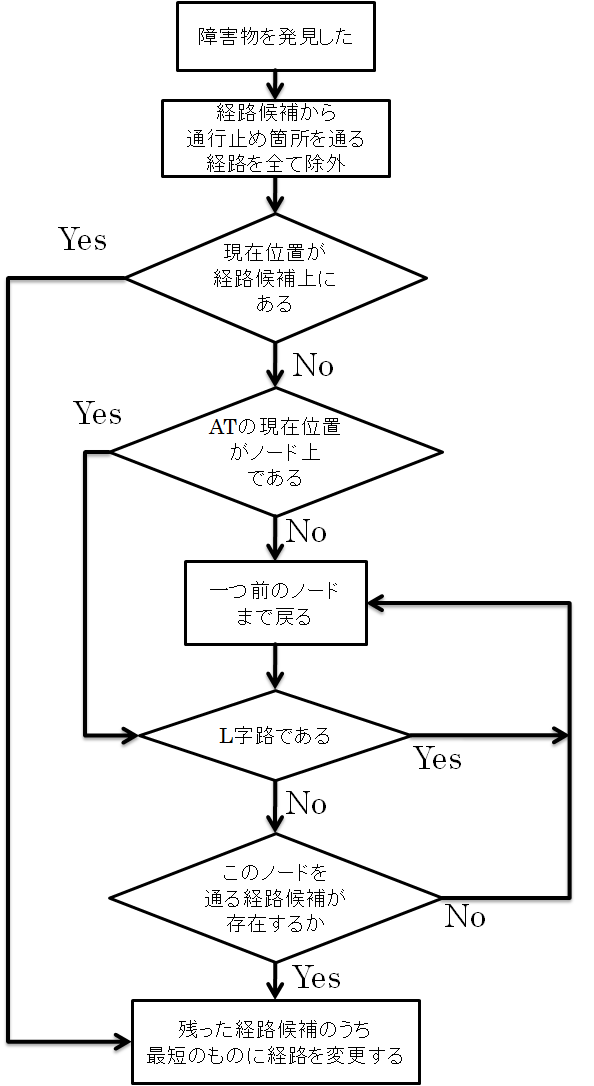
図5.1: ATが障害物を発見してから経路変更するまでのフロー
経路候補の存在を確認する前にノードまで戻っているのは,ノードが経路の分岐点になるためである.つまり,ATが障害物と遭遇した場所から目的地までの経路候補が存在しなくても,一つ前に通ったノードには,実際に走行した経路と分岐した別の経路が存在する可能性があるためである.また,ノードの中でもL字路かどうかをチェックしているのは, L字路は経路の分岐点にはなりえず,ここで代替経路の存在をチェックする必要が無いためである.
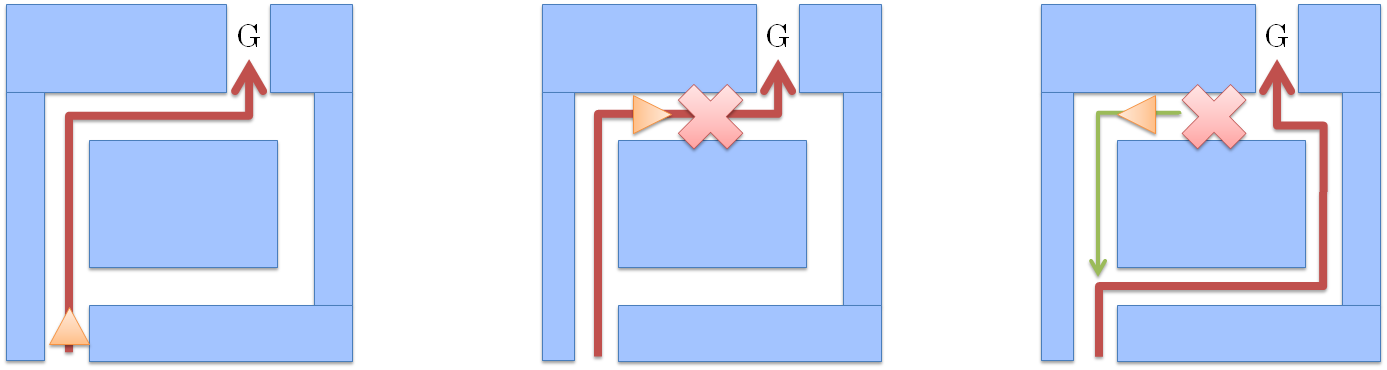
図5.2: (a)目的地までの最短経路 (b)通行止めに遭遇 (c)代替経路まで引き返す(左から順に(a)(b)(c))
図に経路変更の例を示す.図は簡易的な環境地図を示したものである.ATの出発地はS,目的地はGである.また,ATとそれが走行している方向を三角形で示している.ATが自動走行を開始する時点で環境地図上には障害物に関する情報は無いものとする.図(a)は,SとGを最短を結ぶ最短経路である.ATはこの経路をたどるように走行する.図(b)は自動走行する途中で,障害物(バツ印)に遭遇した場面である.その後,経路を変更しようとするが,現在位置を通るような代替経路が存在しない.そのため,代替経路の内のどれかに含まれるいずれかが通過する通路まで戻らなければならない.図(c)は,経路を逆戻りし,目的地に向かうための別の経路と合流しようとする様子を示している.太い矢印は出発地から目的地まで移動するための代替経路,細い矢印は,代替経路に到着するまでの経路である.
なお,ATの自動走行開始時に環境情報サーバが複数の経路を計算する時は,必要以上に長い経路を生成しないために,また,計算時間を削減するために,出発地と目的地の位置関係を基に経路の長さに制限をかけている.
以上のように複数の経路を保持しておくことで経路変更の効率を上げることができる.
二つ目の「環境の変化を知るタイミングの遅れを減らすこと」については,3.6.6項にて,ATに搭載されているセンサ以外のセンサを用いるという解決の方針を示した.
5.2 従来手法との比較
現在,移動体の外部センサとして利用されている仕組みの中で主流なものは,環境設置型センサであるが,本研究では,環境設置型センサを用いる代わりに,環境情報を取得するためのセンサを搭載した移動体である,小型無人移動体(SUV)を用いてATの自動走行の効率化を行う.
環境設置型センサとSUVで異なる点は,移動できるかどうかということである.環境設置型センサは,監視カメラ等のように定点から環境を観測するため,常に同じ場所を観測する.それに対してSUVは4章で述べた通り,自律走行が可能である.そのため,1台のSUVで様々な場所を観測することが可能である.
本節では,環境設置型センサを用いず,SUVを採用した理由を述べる.
5.2.1 前提条件
本研究では,環境設置型のセンサよりもSUVに優位性がある,つまり,位置が固定されているセンサよりも移動可能なセンサの方に優位性があると考えたため,SUVを利用している.ただし,どのような状況においてもSUVが環境設置型センサによりも優れているというわけではない.
SUVが環境設置型センサに対して優位性を示すための前提条件として,見通しが悪い環境で観測を行う場合が挙げられる.環境設置型センサは,設置されている場所から見える範囲しか観測できない.例えば,体育館のような見通しの良い場所ならば,環境設置型センサを一,二箇所に設置するだけで体育館のほぼ全域を観測することが可能であるが,見通しの悪い場所では環境設置型センサの観測可能な領域は狭まってしまう.そのため,死角となる領域を無くそうとすると,センサの数が増えてしまい,面積当たりのセンサのコストが大きくなってしまう.
SUVならば,ある時点から観測できない領域があったとしても,その近くまで移動することにより,観測可能になる. そのため,SUVは,周囲の見通しが悪くなったとしても必要となる台数は急激に増えることはない.
5.2.2 環境設置型センサに対する小型無人移動体の優位性
SUVが環境設置型センサに比べて優れている点は主に以下の3点である.
【網羅性がある】
環境設置型センサは設置されている場所から移動することができないため,その場から観測できる領域の情報しか取得することができない.そのため,センサの死角にあたる領域を観測することができない.例えば,壁の向こう側であったり,障害物がセンサの前に置かれた時の,その向こう側の領域などである.
SUVならば移動可能であるため,SUVが走行できる場所ならばその場所を観測することができる.例えば,障害物が存在しても回り込んで障害物の向こう側の領域を観測することができる.
【観測対象に対する距離や方向の自由度が大きい】
環境設置型センサは観測対象に対して一方向からしか観測することができない.また,観測対象に接近することができない上に,センサから距離が遠くなるほど計測精度が低くなる.計測対象との距離が遠いほど計測精度が低くなることは,4.5節で行った実験の結果により確認された.しかし,SUVは移動可能であるため,観測対象に接近したり,様々な角度から観測することなど,多視点的な観測方法を取ることが可能である.それにより,環境設置型センサよりもSUVの方がより詳細で,より精度の高い情報を取得可能である.
【ATと同じ目線の高さにセンサを配備可能】
ATと同じ目線の高さにセンサを配備することによって,天井付近から取得したようなデータに比べてATが利用しやすい情報をATに対して提供できるようになる.例えば,SUVの取得したセンサ情報をATのセンサ情報と統合することでSUVをATの拡張型センサとして利用することができる.また,環境設置型センサをATと同じ高さになるように設置した場合,障害物等によってセンサの視界が遮断されてしまう恐れがあるが,SUVは自律走行が可能なため,そのような障害物を回避して探索を続けることができる.
5.3 個人用知的移動体の自動走行経路の動的変更
環境情報サーバは,SUVから道幅の情報が送信された時に,経路の道幅に関する情報を更新する.その時に各ATについてその車幅と自動走行経路の各地点の道幅を比較し,その中に車幅よりも狭い道幅になっている場所が一か所でも存在した場合,環境情報サーバはそのATに対して自動走行経路の変更の通知を行う.この時にATが経路変更可能な状態だった場合,つまり,即座に経路変更の手続きをしても安全な場合は,すぐに環境情報サーバはATに代替経路を送信し,自動走行経路を変更する.経路変更不可能な状態,例えば,障害物回避中や,交差点進入時など,その場で経路変更を行うと危険な場合は,その動作が終わり,次に壁沿い走行に移行した時にATは自動走行を中断し,環境情報サーバに対して経路の要求をして代替経路を送信してもらう.
以上の仕組みにより,ATに搭載されているセンサで検知できない場所に障害物が突然現れて,走行する予定の通路が通行できない状態になったとしても,動的にATの自動走行経路を変更することができるようになる.それにより,ATが通行止めの現場に遭遇した後で経路を変更し,来た道を戻るような時間の無駄を軽減して,自動走行の効率化が実現できる.
実際にこの仕組みを実行したときの様子を述べる.図はこの仕組みを利用し,動的な経路変更を行ったときのATのコンソール画面である.丸で囲まれた矢印はATとその進行方向を表し,番号付きの正方形はRFIDタグを表す.図(b)(c)の5番タグは通行止めであることを表す.図(a)の7番タグと3番タグを結んでいる線と,図(b)(c)の6番タグと3番タグを結んでいる線はその時のATの自動走行経路を表す.
図(a)で,ATは7番タグから3番タグに図のような経路で向かっている.その後,SUVが5番タグの前を走行した際に道幅を測定し,環境情報サーバに通知したところ,環境情報サーバはATにとって行き止まりであると判断したため,ATに対して経路変更の通知を行った.その結果,図(b)で5番タグが通行禁止状態になり,経路が変更された.そして,図(c)ではATが5番タグ,つまり,通行止めになっている場所に到達する前に経路を変更して目的地に向かっている.
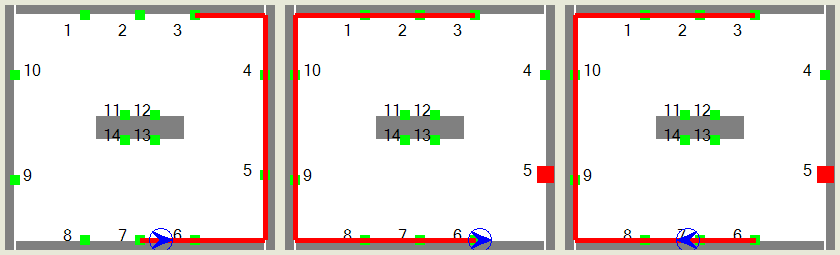
図5.3: (a)最短距離で目的地に向かっている,(b)通行止め通路の発生により経路変更を行った,(c)変更後の経路を走行している (左から(a)(b)(c))
ここで問題となるのは,経路上に障害物が現われた時に,その情報を常にATが走行する前に環境情報サーバに通知できるかどうかということである.この問題に対する明確な解答はまだ見つかっていないが,一つの解答としては,環境情報サーバは全てのATが走行する経路を把握しているため,その経路上を重点的にSUVに探索させることによってATにとっての情報の鮮度を上げて自動走行の障害となるような通行止め状態の通路を発見しやすくなるという方法が考えられる.
以上の手法の有効性を検証するためにシミュレーションによる実験を行った.次節ではその詳細について述べる.
5.4 シミュレーションによるATの自動走行の効率化の検証
本節では,SUVに環境を巡回させることによりATの自動走行をどの程度効率化可能かどうかを実験により確認する.また,本実験により,次の仮説を検証する.
- SUVが存在しない場合よりも存在する場合の方が自動走行の効率が良い
- SUVには台数効果があるが,台数が増えるといずれは効率性が頭打ちになり,最適な台数が決まる
一つ目の仮説は,移動体自身に搭載されているセンサで取得した情報のみを利用するよりも,自分以外の場所に存在するセンサの情報を使用したほうが効率的に走行することができるという予測に基づいている.
二つ目の仮説は,SUVの台数効果があり,かつ,環境の面積当たりの適切なSUVの台数が存在するだろうという予測に基づいている.SUVを増やすことにより,環境の変化を取得するタイミングが増えるが,ある一定以上の台数になると,それほど環境の変化を取得するタイミングが増えなくなると考えられる.
ATの自動走行の効率化という問題は実世界の問題であるため,この実験は,同様に実世界で実験を行うことが望ましい.しかし,現時点でSUVは2台しか製作されていないため,ATの自動走行の効率化に関する台数効果を実世界で検証することができない.また,実世界で台数効果を検証するに当たり,膨大な時間が必要であることが予測される.そのため,ATの自動走行の効率化の検証に関してはシミュレータを開発し,それによって行うことにした.
なお,本節において「障害物が現れる」,「障害物が無くなる」という表現はシミュレータ上の現象を表すものであり,「障害物が現れる」については,実世界において,人が密集してATが通行できない状態になる,あるいは,一時的に荷物が置かれてATが通行できない状態になることを指す.また,「障害物が無くなる」については,実世界において,密集していた人々が解散してATが通行できるようになること,また,一時的に置かれていた荷物が撤去されることを指す.また,「障害物の存在期間」は,障害物が現れてから障害物が無くなるまでの期間を表す.
5.4.1 実験内容
本実験はシミュレータ上で行われた.シミュレータでは,ATおよびSUVによる走行,障害物の認識,環境情報サーバとのやり取り,ATの自動走行の経路変更,また,障害物の出現や消滅といった動的環境を再現した.
このシミュレータでは,障害物は静止障害物のみとし,移動障害物は扱わないこととする.
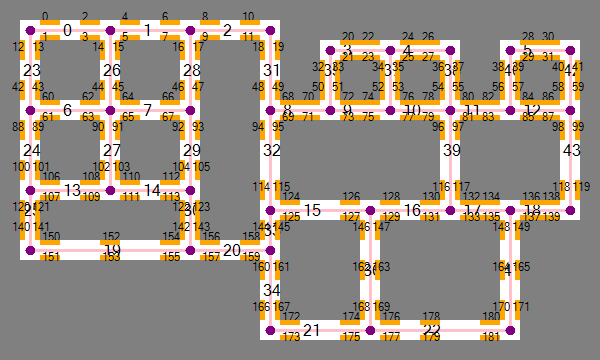
図5.4: 使用する環境地図の例
ピンク色の細い線はエッジ,紫色の点はノードを示す.オレンジ色の矩形はRFIDタグを示す.各エッジの中央にある数字はエッジのIDを示す.RFIDタグの上にある数字はタグIDを示す.
ATおよびSUVは,建築物のフロアマップを簡略化(図に例示)した環境地図上を走行する.これは,マス目を組み合わせたものであり,これらのマス目は,走行できるマス目と走行できないマス目に分類される.図の白いマス目は通路であり,ATおよびSUVが走行可能である.黒いマス目は壁であり,ATおよびSUVは走行できない.障害物は通路上にランダムに発生する.
ATおよびSUVは,一定時間ごとに1マスずつ進む.この一定時間を,ここでは1ステップと呼ぶ.ATが進んだ距離はマス目の数で表され,ATが走行した時間はステップ数で表される.なお,今回の実験では,マス目の1辺は実世界での50cmに対応している.また,1ステップは実世界での1秒に対応している.
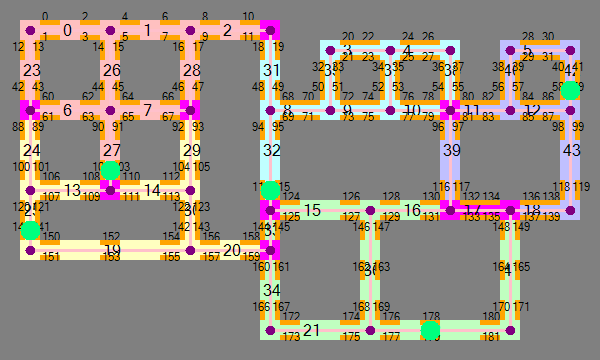
図5.5: SUVの台数に応じて巡回経路を設定
緑色の円がSUVを示す
シミュレーションの流れは次のようになっている.まず,SUVの台数を設定し,その台数分だけ地図を分割し,SUVの巡回経路を設定する.図はSUVが5台走行する場合の巡回経路を表したものである.通路が色分けされており,各色につき1台のSUVが走行する.各色の境目に存在する色の濃いマス目は,隣接する経路を走行するSUVが共通して走行可能なマス目であり,主に交差点に設定される.この巡回経路は,現在は人手によって設定されている.次に,ATの出発地,目的地を設定し,出発地と目的地を結ぶ経路を自動的に計算し,その中の最短経路をATに移動させる.ATの出発地,目的地は,それぞれが近くなりすぎない範囲でランダムに設定される.
その後,ATとSUVを走行させる.ATは設定された経路を辿り,目的地まで走行する.途中で障害物と遭遇した場合は,経路を変更する.また,SUVがATの経路上に障害物を発見した場合,ATは経路を変更することがある.SUVが障害物を発見した時のATの動作の詳細については後述する.そして,ATが目的地に到着した時に,1回のシミュレーションを終了する.
なお,本実験では,地図を5種類用意した.この5つの地図を図から図に示す.そして,地図一つにつき1000回のシミュレーションを行った.障害物はランダムに発生し,環境中にしばらく残り続けた後環境中から取り除かれる.障害物の存在期間は0ステップから100ステップの間でランダムに設定されている.
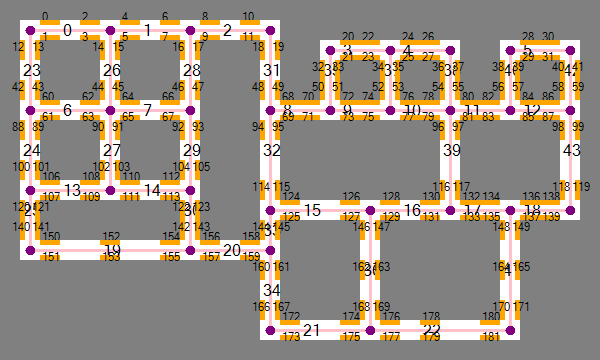
図5.6: 地図A
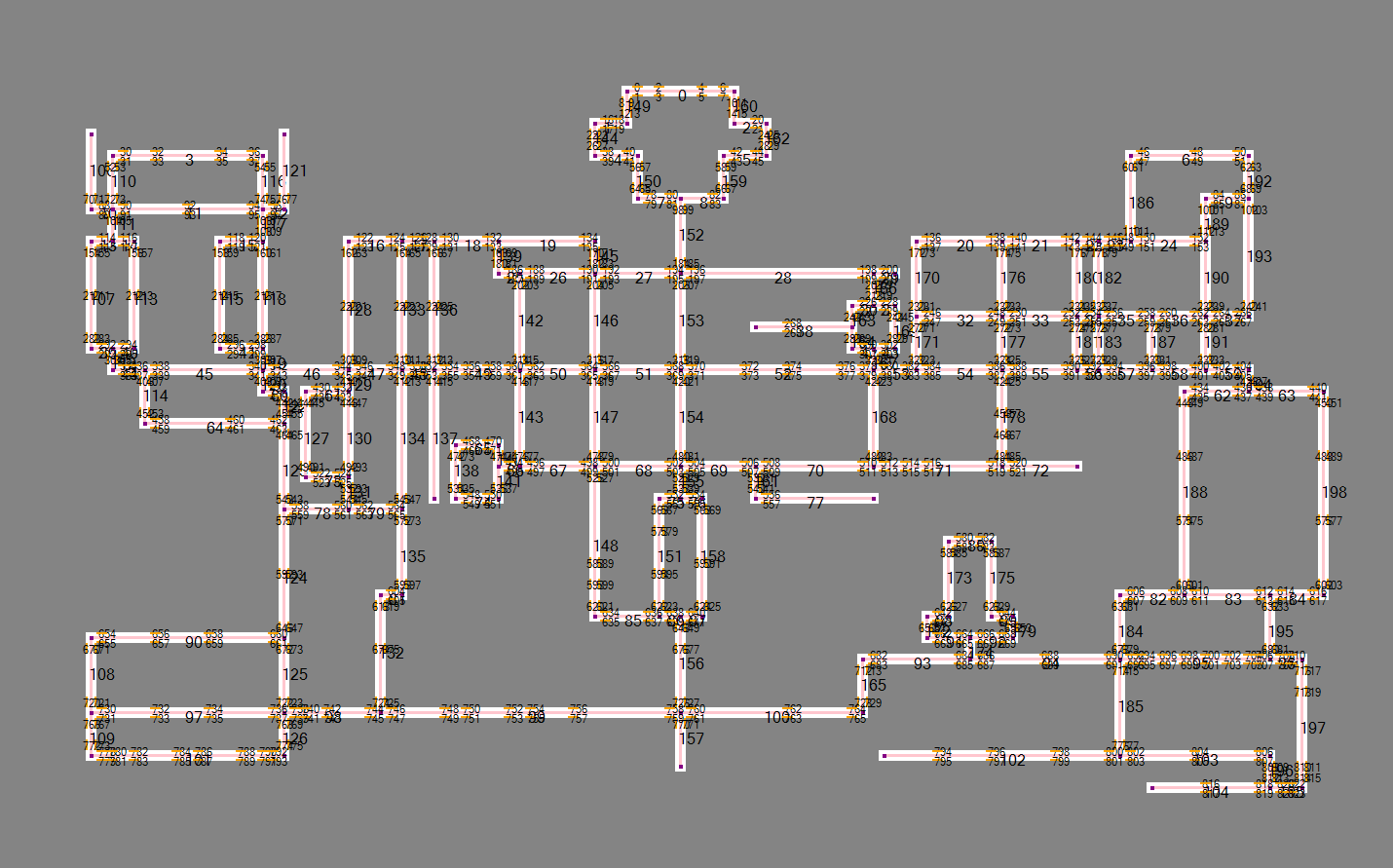
図5.7: 地図B
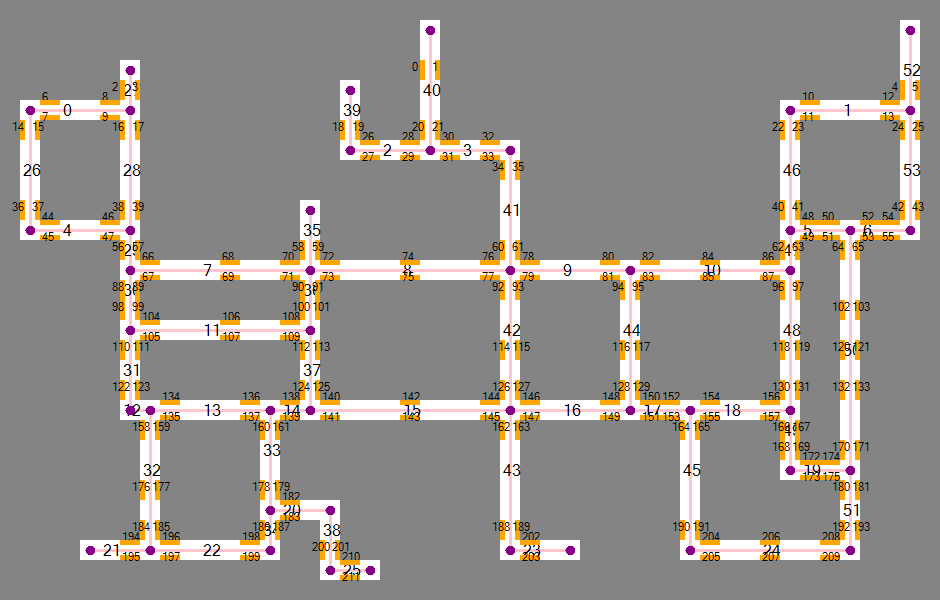
図5.8: 地図C
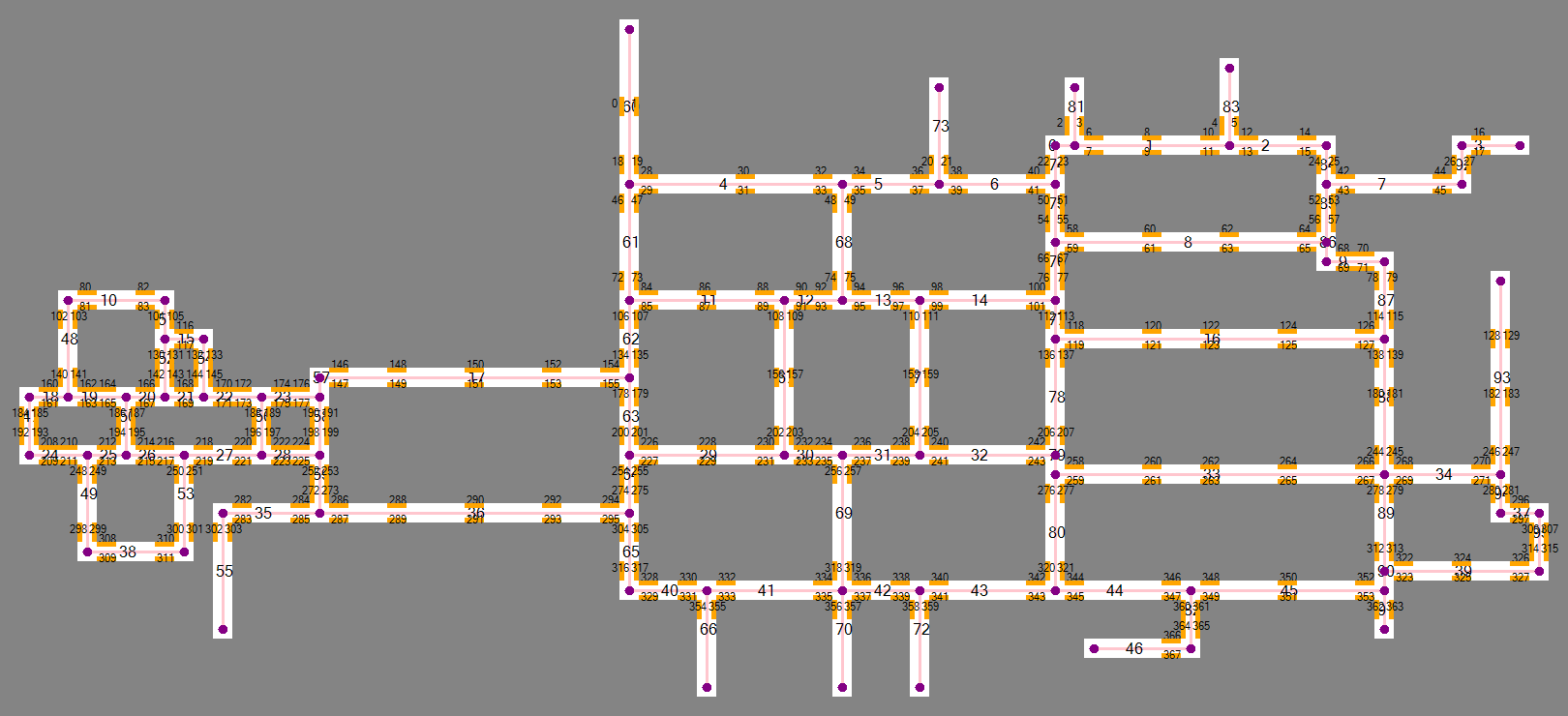
図5.9: 地図D
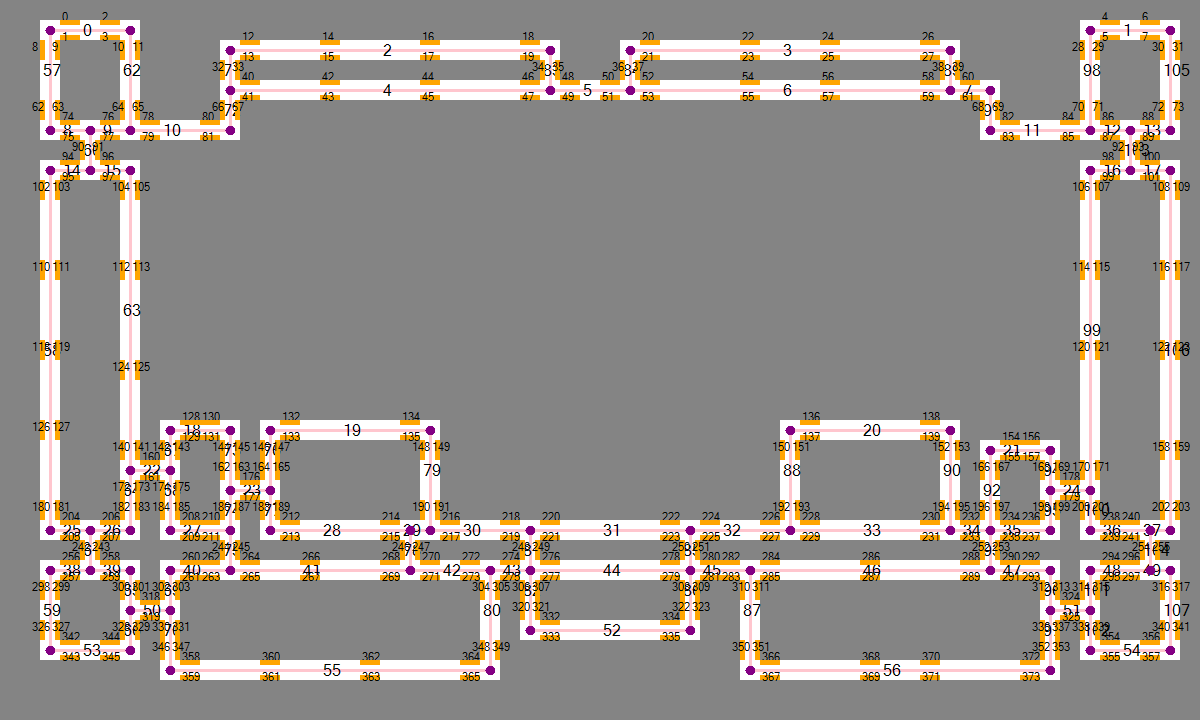
図5.10: 地図E
また,実世界でのセンサの誤差を考慮するために,4.5節で行った実験で得られた道幅の測定誤差の分布を利用している.シミュレータ上の障害物には,この障害物が現れたことによって制限された道幅を表す数値がランダムに設定されている.SUVが障害物を発見した場合,この数値に前述した誤差を加算したものを環境情報サーバに通知する.
本実験では,(a)ATのみの場合,(b)SUVを走行させる場合,(c)完全情報の状態の場合の3種類の場合で行った.
(a)ATのみを走行させる場合,環境の変化を知る手段がATに搭載されているセンサしかない.そのため,障害物が現れたり無くなったりしたとしても,その障害物の存在はATがその場にいる時にしか知ることができない.そのため,これからATが走行しようとしている場所に障害物が現れたとしてもATはその障害物の存在を事前に知ることができない.結果的に,障害物と遭遇した後に経路を変更して目的地に再び向かうため,上記の3種類の中では最も効率が悪いと考えられる.
(b)環境中にSUVが追加された場合,環境中をATのみが走行している時よりも環境の変化を知る頻度が高くなる.そのため,ATのみが走行している時よりも効率的な走行が可能であると考えられる.
(c)完全情報の状態とは,このシミュレータにおいて,実世界で障害物が発生した場合,もしくは障害物が無くなった時に即座に環境情報サーバにその情報が通知される状態を指す.この場合,環境情報サーバは環境の変化をリアルタイムに把握でき,その時々で最適な経路をATに通知できるため,3種類の中で最も効率的な走行が可能であると考えられる.
本実験によって測定するデータは,SUVの導入により,(α)ATが出発地から目的地まで移動するためにかかった時間,(β)その時間の中で,実際にATが走行していた時間,(γ)実世界の障害物の有無を環境情報サーバが正しく認識していない期間である.それぞれ以下のような意図がある.
(α)目的地まではより早く到着できる方が望ましいため,この時間は短いほど良い.
(β)目的地まで向かうための経路が全て通行できなくなってしまった場合,再度行き止りになっている通路を確認し,通路が再び通行可能な状態になっていないかどうかを確認する必要がある.その時に,ATが通行できる経路を探すために建物内を走り回るよりも,外部から通行可能箇所を発見した旨を通知してもらうまで待機し,走行する必要がある場合のみ走行する方が良いと考えられる.なぜなら,通行できる通路を探すために走り回っていた場合,搭乗者にとっては無駄な動きをしているように映る.また,走行している時間が短いほどバッテリーを節約できるため,この時間も短い方が良いと考えられる.
(γ)環境の変化をより短い時間で環境情報サーバに通知することによって,自動走行しているATをより適切に行動させることが可能となる.SUVの台数を増加させることにより,環境の情報をより短い時間で環境サーバに伝えることが可能であると考えられるため,この点を検証する.
(α)(β)の結果から,仮説として述べた「SUVが存在しない場合よりも存在する場合の方が自動走行の効率が良い」「SUVには台数効果があるが,台数が増えるといずれは効率性が頭打ちになり,最適な台数が得られる」の2点が正しいかどうかを検証する.また,(γ)の結果から5.1節で述べた,「環境の変化を知るタイミングの遅れを減らすこと」をSUVによって実現されているかどうかを確認する.
5.4.2 シミュレーション実行時のATの動作について
本項では,このシミュレーションで行われる経路変更処理の詳細を説明する.なお,本節で挙げたATの自動走行経路の変更の処理は,実機においても同様に実現可能である.
【SUVによる障害物認識時のATの動作】
環境情報サーバは,障害物が環境中に存在するか,存在しないかということを,環境中を走行している移動体から通知してもらう.その時に,障害物が発見された時点から障害物が無くなったことを確認した時点までを障害物が存在した期間とし,その期間を環境情報サーバに蓄積する.その蓄積された期間を基に,これから現れる障害物の存在期間を予測する.
ATの走行経路上に障害物の存在が確認された時,ATがその場所に辿りつく前に障害物が無くなるかどうかを計算する.障害物が無くなる方が早い場合は,ATの経路を変更せずにそのまま走行する.また,障害物が無くなる前にATがその場所に辿りつきそうな場合でも,経路変更して目的地に到着する時間よりも,障害物の場所まで辿りつき,障害物が無くなる方まで待った後に目的地に到着する時間の方が短い場合は,経路を変更せず,障害物の前で障害物が無くなるまで待機し,その後走行を再開する.
完全状態の場合は,リアルタイムに障害物が現れたこと,障害物が無くなったことを環境情報サーバに通知可能である.
SUVの場合は,完全状態に比べてリアルタイム性が低いため,障害物が現れたり無くなったりしたことを,即座に環境情報サーバに通知することができない.そのため,SUVが障害物を発見した時, 環境情報サーバはその時に障害物が発生したと解釈する.また,SUVが,障害物が無くなっていることを確認したときに,環境情報サーバはその時に障害物が無くなったと解釈する.つまり,環境情報サーバの認識と,実際の障害物が現れたり無くなったりする時間はずれているということになる.そのため,障害物の存在期間の予測も完全状態に比べて不正確なものになると考えられる.
【待機中のATの動作】
環境中に障害物が現れ,道が塞がれると,目的地まで到達するための経路が存在しなくなる場合がある.この場合もATは待機する.例えば,図左のような状態である.この場合,完全情報でなく,かつSUVが存在しない場合と,完全情報もしくはSUVが1台以上存在する場合で,ATの行動が異なる.
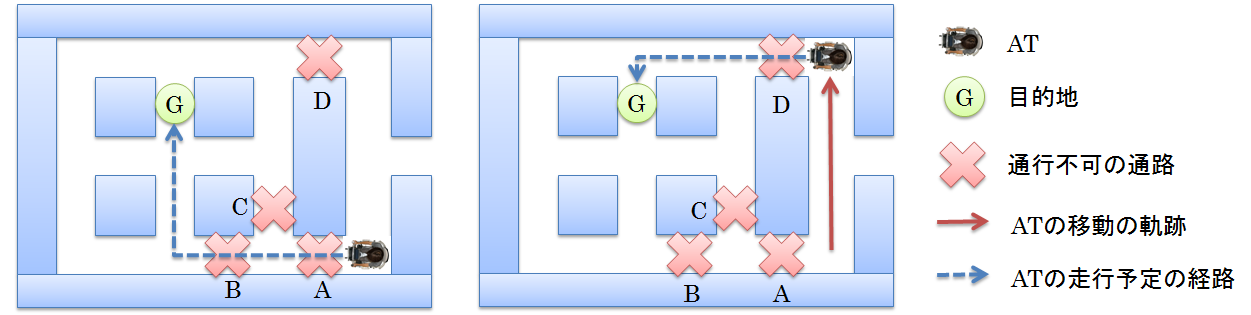
図5.11: 目的地に到達するための経路が無い場合の動作
完全情報でなく,かつSUVが存在しない場合は,環境を認識することができるセンサを持つのはATしか存在しないため,自らが空いている経路を探しに行かなければならない.空いている通路を探す間も搭乗者が乗っている状態であるため,搭乗者にとっては,無駄に走り回っているという印象を与えかねない.
完全情報,もしくはSUVが1台以上存在する場合は,ATは待機し,SUVに空いている通路を探してもらうという方法を取る.
しかし,通路が通行できるようになったからといって必ずしもその通路を通って目的地にそのまま辿り着けるとは限らない.図左にあるように,障害物A,B,C,Dの存在が既知であるとし,ATが障害物Aの前で待機しているとする.障害物Aが無くなったとしても,障害物B,Cが残っているため,ATは経路を決められず,その場で待機したままとなる.ここで,障害物Dが無くなった場合は,その場所を通る経路を生成することができるが,回り道になってしまい,時間がかかってしまう.そこで,待機中に新たな障害物が発見された場合,経路を生成した時または,SUVが障害物を発見した場合に最も遭遇する障害物が少なくなるような経路を計算し,現在位置から移動できる場所まで移動する方法を採用した.図右ではATの現在位置を通る経路よりも,障害物D側を通る経路の方が遭遇する障害物が少ないことが予測されるため,図のように障害物D側に移動して待機する.
5.4.3 実験結果
まず,各地図において,ATが出発してから目的地に到着するまでにかかったステップ数,およびその中で実際にATが走行していたステップ数を図に示す.図の凡例における,到着までのステップ数は前者を,走行していたステップ数は後者を指す.
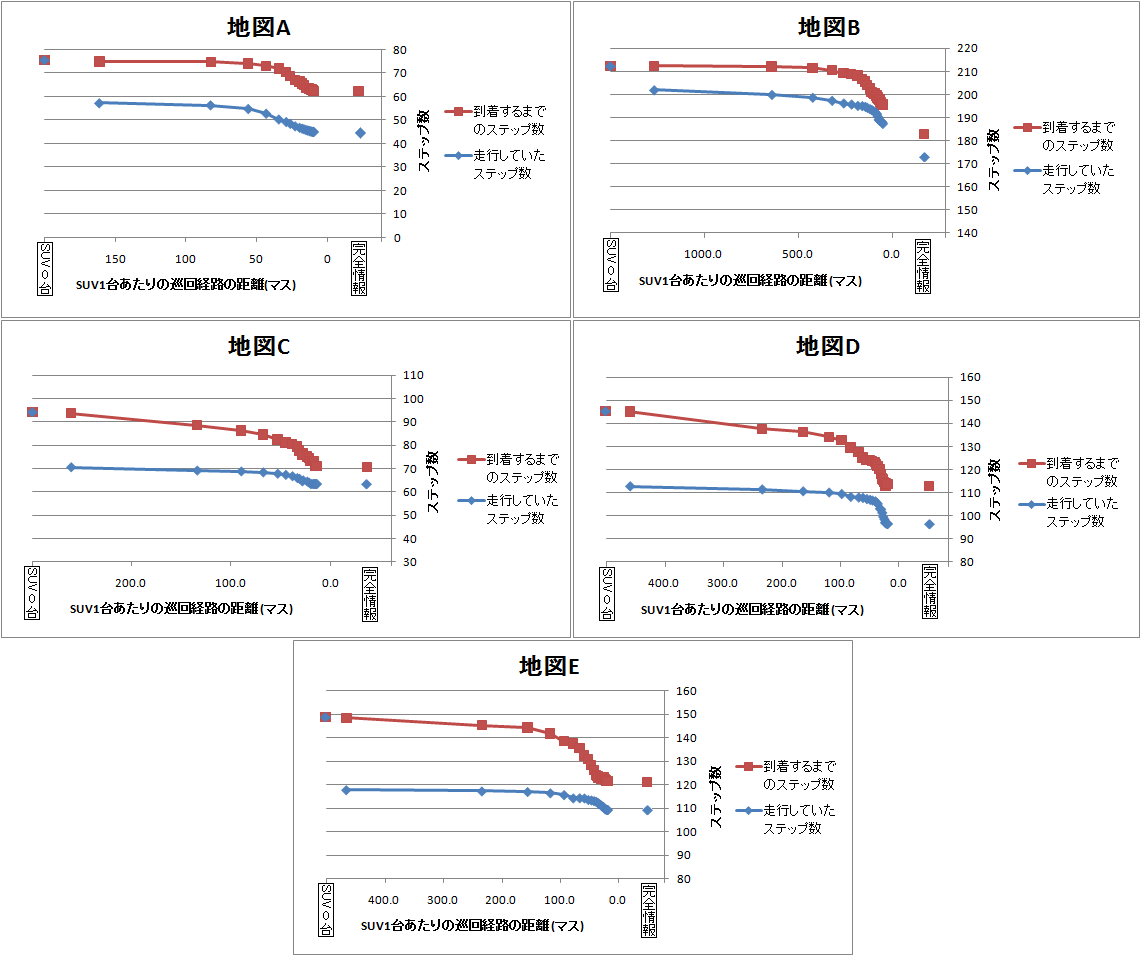
図5.12: 地図AからEにおける到着するまでのステップ数と走行していたステップ数
横軸はSUV1台あたりの巡回経路の距離である.SUVの台数ではなく,1台あたりの巡回経路となっているのは,SUV1台あたりの負担と,自動走行の効率性の関係を明確にしたいためである.線で接続されている点のうち一番左がSUV1台の場合で,右に行くほどSUVの台数が1台ずつ増加する.
横軸の中で「SUV0台」と書かれている箇所があるが,ここは完全状態の場合でなく,かつSUVの台数が0台の場合,つまり,ATのみで環境の変化を認識するという,前述した3種類の場合の中で最も効率が悪いと考えられる場合の結果を記載している.SUVが0台の場合は,ATが目的地に到着するまでにかかったステップ数と,実際に走行していたステップ数は一致する.それは5.2節で述べたように,環境認識可能なセンサを持つのはAT自身しかないため,待機していては何の情報も得られないためである.
また,横軸の中で「完全情報」と書かれている箇所があるが,ここは,前述した3種類の場合の中で最も効率が良いと考えられる場合の結果を記載している.
全ての場合で,SUVの台数が増えるほどATが目的地に到着するまでにかかったステップ数,実際にATが走行していたステップ数が減少している.特に,SUVが0台の時と,1台以上の時のATが実際に走行していたステップ数に大きな改善点が見られる.この結果により,SUVが存在した場合の方が,無駄に走行する時間が減っていることがわかる.また,SUVの台数が増えるにつれて完全情報の状態に収束している傾向がある.そのため,各地図において最も効率的なSUVの台数が存在することが予測される.これは次項にて考察する.
この結果によって,仮説に挙げた「SUVが存在しない場合よりも存在する場合の方が自動走行の効率が良い」が立証された.さらに,もう一つの仮説「SUVには台数効果があるが,台数が増えるといずれは効率性が頭打ちになり,最適な台数が得られる」のうち,効率性が頭打ちになるという部分は立証されたが,最適な台数については,適切な台数の傾向は得られたものの最適な台数を得るところまでは至らなかった.
次に,実環境における障害物の有無と,環境情報サーバが認識している障害物の有無のずれについての結果を図に示す.このグラフは,全ての障害物の有無と環境情報サーバ内での障害物の有無のずれのステップ数の総計を,そのシミュレーションの試行時に現れた障害物の数で割ったものである.つまり,障害物1個あたりの障害物の有無の認識のずれの期間を表している.
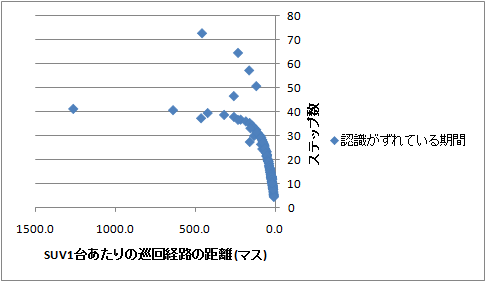
図5.13: SUV1台あたりの巡回経路の距離と実世界と環境情報サーバの障害物の有無の認識がずれている期間の相関(すべての結果)
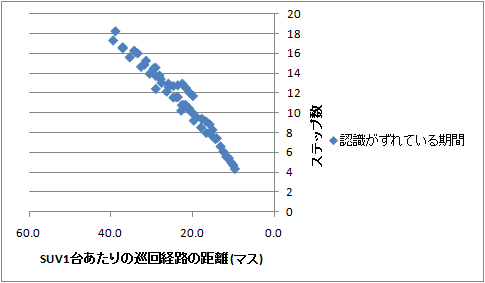
図5.14: SUV1台あたりの巡回経路の距離と実世界と環境情報サーバの障害物の有無の認識がずれている期間の相関(巡回経路の距離が40マス以下の場合)
この結果は,全ての地図の結果を合わせ,SUV1台あたりの巡回経路の距離を横軸として分布をまとめたものである.図は,得られた結果を全て示したものである.SUV1台あたりの巡回経路の距離が大きい場合は,値が発散しているが,距離が小さくなるにつれ,収束していることが分かる.図は,図のうち,巡回経路の距離が40マス以下の場合を抜粋したものである.これらのグラフから,SUV1台あたりの巡回経路の距離が短くなるほど実環境での障害物の有無と環境情報サーバが認識している障害物の有無のずれが小さくなっている.つまり,巡回経路の距離が短くなるほど環境の情報がより正確に環境情報サーバに通知されているということが言える.つまり,5.1節で自動走行の効率化手法の例として述べた,「環境の変化を知るタイミングの遅れを減らすこと」を実現していることが分かる.
以上の結果から,SUVが環境中に存在することによって,ATの自動走行の効率化が実現されたことが検証されたため,提案手法の有効性が確認された.また,本実験は4.5章で行われた実験で得られたSUVによる道幅の測定誤差を考慮したものであるが, 本実験結果から,SUVによる道幅測定の精度も十分に妥当なものであると判断できる.
5.4.4 考察
本実験により,SUVの台数を増やせば完全情報の状態に近付くという傾向があるという結果が得られた.ここで,SUV1台あたりの巡回経路の距離が小さい場合を取り出した図を下に示す.なお,地図Bについては,地図が大きく,SUV1台あたりの巡回経路の距離が40マス以下の場合が行えなかったため,除外している.
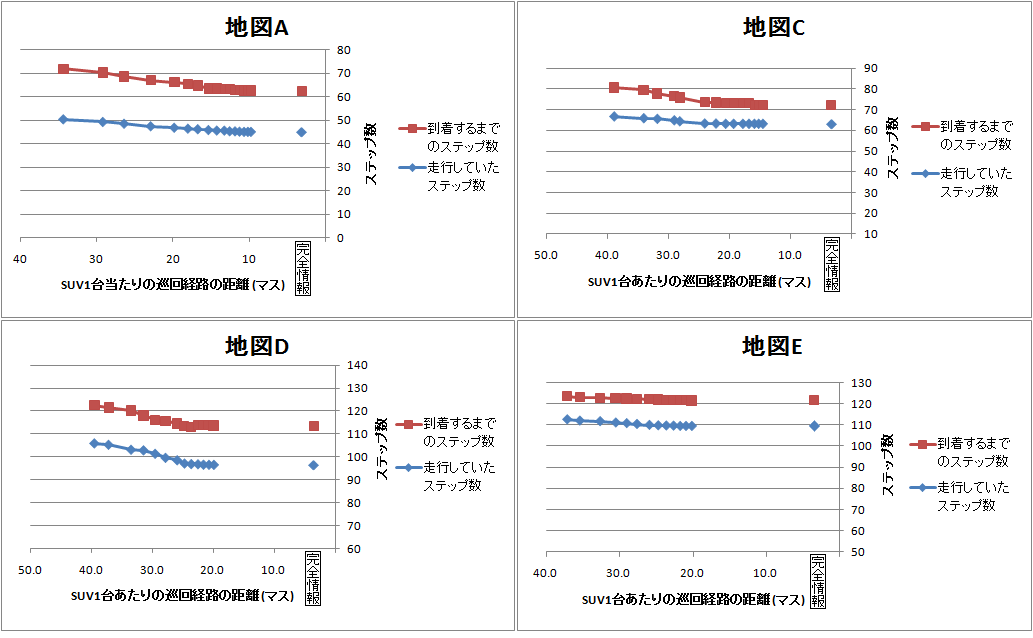
図5.15: 地図A,C,D,Eにおける到着するまでのステップ数と走行していたステップ数(距離が40マス以下の場合)
図によると,SUV1台あたりの巡回経路の距離が約15マスから約30マス程度で,ATが目的地に到達するまでのステップ数,実際に走行していたステップ数の減少が止まっており,それ以上SUVの巡回距離が短くなる,つまり,SUVの台数を増やしたとしても効率性が上がらなくなっていることが分かる.本シミュレータにおいて,1マスは実世界における50cmに相当するため,この結果は,本実験で採用したSUVの速度,つまり50cm/sの場合は,実世界においてSUV1台あたりの最適な巡回経路の距離は約7.5mから約15mであると言える.
図の結果では,SUVの台数が多くなるほどATが止まっている時間が短くなる傾向があった.これは,SUVの台数が少ない場合に目的地まで続く経路が無くなった時,ATが障害物の前で待機することになった場合,基本的にその障害物が無くなるまでATは障害物の前で停止する.しかし,SUVの台数が多くなり,環境情報のリアルタイム性が上がると,この場所で障害物が無くなるまで待った方が良いか,それとも今SUVによって障害物無いことが確認された場所まで回り道してから目的地に向かった方が良いか,という選択肢が現れる頻度が高くなる.そこで回り道したほうが早く目的地に到着できるという予測ができた場合は回り道をして,待機していた時よりも早く目的地に到着できる.このような理由で,SUVの数が多い時ほど,ATが出発地から目的地に到着するまでの時間に対して,実際に走行している時間の割合が増えると考えられる.
6 関連研究
6.1 移動体の外部センサに関して
6.1.1 DVS (Distributed Vision System)
視覚情報に基づいて実世界で自律的に移動するロボットの実現は,依然として困難である.単一の視覚しか持たない自律移動ロボットが移動可能な領域や障害物の発見など,様々な視覚タスクを並列に実行するためには,実行するタスクを時間的に切り替えたり(時間的注意制御),自律移動ロボットが実行する必要のある様々な視覚タスクを実行するために最も適切な視点を選択する必要がある(空間的注意制御).
しかし,このような注意制御を実現するためには,現在のロボットでは困難であり,その問題点を次のように挙げている.
- 従来のロボットは視覚センサが台車に固定されており,適切な視点からの視覚情報を得るのが難しい
- 単体のロボットでは,広範囲にわたる動的な環境の首尾一貫したモデルを維持するのが難しい
そこで十河らは,DVS (Distributed Vision System)と呼ばれる,複雑で動的な実環境における移動ロボットの誘導を可能にする分散視覚システムを提案した.DVSは,ネットワークによって接続された,実環境に埋め込まれた多数の視覚エージェント(VA : Vision Agent) によって構成されている.従来の研究に比べ,VAの位置をあらかじめ計測しておく必要はなく,VAが環境を繰り返し計測することによって,各VAが局所的な座標系における位置を推定しているため,システムに柔軟性がある.
本研究との類似点は,ロボットと乗り物という違いはあるが,自動走行・自律移動する移動体自身が持つセンサのみでは適切な情報を得ることが難しいため,環境側にセンサを設置し,移動体の自律移動・自動走行を支援する点である.この研究では,環境側に多数のVAを設置しており(図),設置されているカメラ同士の間隔が短い.そのため,広い環境下においては設置されるカメラの数が膨大なものになってしまう.しかし,SUVはより少ない台数で環境の変化を認識することができるため.複雑で広い領域においてはSUVに優位性があると考えられる.

図6.1: DVSにおけるロボットの誘導実験の様子(円で囲んだ部分がVA)
6.1.2 環境固定センサとロボット搭載センサの協調センシング
周囲に人間がいる環境で作業するロボットは,作業対象だけでなく,周囲の環境を正確に認識することが求められる.しかし,ロボット単体の機能のみで多種多様な状況に応じた環境認識を行わせるのは困難である.そこで,毛利らは,環境に多数の分散型センサやRFIDタグを環境側に配備し,環境情報の構造化を行うことでロボットの支援を行った.この研究は,毛利らが進める「ロボットタウン」プロジェクトの一環であり,その中で環境固定センサとロボット搭載センサによる協調センシングを実現するものである.
本研究との類似点は,固定カメラにおける,計測範囲の狭さ,また,物体による遮蔽による網羅性の低さを問題としており,それを解決するためにロボットに搭載されているセンサを移動型センサと見なし,その情報を統合して世界像を構築しようとしている点にある.
この研究では,移動ロボットの位置測定にiGPSモジュールと呼ばれる,屋内環境において平坦な床の上を移動する移動体の位置計測を行う環境設置型のシステムを利用している.移動ロボットはデッドレコニングの機能を有しているが,iGPSモジュールによる位置補正を要する.しかし,広く見通しの良い屋内ならばiGPSの仕組みは有効に働くと考えられるが,屋内環境はそのような場所ばかりではなく,見通しの悪い場所も存在する.そのような場所ではiGPSモジュールを多数設置しなければならない状況になってしまう.一方,SUVはデッドレコニングの機能を有しているだけでなく,自身に搭載されているレーザレンジセンサのみで自己位置の補正を行うことが可能であるため,環境側に位置補正の仕組みを取り入れる必要が無い.そのため,見通しの悪い場所においてはSUVに優位性があると考えられる.
この研究成果を本研究に採り入れることで,見通しの良い場所はiGPSモジュールの仕組みを,見通しの悪い場所はSUVを採用するなど,それぞれの得意な領域を分担して環境認識を行うことが考えられる.
6.2 知的移動体に関して
6.2.1 認知症を持つ高齢者の機動性を向上させる知的な電動車椅子
認知症を持つ高齢者は自身や周囲の人間の安全性のために,通常の手押しの車椅子に乗り,一人で移動することや,電動車椅子を操縦することができない.その結果,機動性が大幅に下がってしまう.そこで,Alexらは,認知症を持つ高齢者でも利用可能な,.
この車椅子には,大別して,人間や静止障害物との衝突回避,ナビゲーションによる案内,移動と探索の促進という3つの機能が存在する.衝突回避の機能の中に,搭乗者に声をかけ,搭乗者の次の行動を提案する機能も存在する.まず,衝突回避について,Alexらの電動車椅子には深度計測が可能なカメラが前方に搭載されており,センサから10cmから40cmまでの距離ならば分解能1mm,10fpsで,2mでは分解能30cm,2fpsで計測可能であり,距離と画像処理を用いた高精度な障害物認識を行うことができる.また,この電動車椅子が進行方向上に障害物を発見した時は,搭乗者が操縦していたとしても停止する.その後,障害物の左右に空いている空間を探し,搭乗者に対して「右に行ってみて下さい」,「左に行ってみて下さい」などの提案を行う.
本研究で研究・開発している個人用知的移動体ATも,この車椅子と同様に,人間や静止障害物との衝突回避,自動走行によるナビゲーション,人間の移動の支援を行っている.また,ATも車椅子と同様に搭乗者による操縦をすることができ,障害物が現れた時は搭乗者による操縦が行われている時でも自動的に空いている領域を探し,障害物回避を行う.また,Alexらは今後の課題として,車椅子の中で閉じるのではなく,他の車椅子との調和や,医療という全面的なシステムの一部分となるような構想を持っている.これは,ATにおける,他の移動体との連携や,環境情報サーバを有する建物とATの関係に似ている.
Alexらの電動車椅子の研究に対するATの優位性としては,30m先まで計測可能なレーザレンジセンサが前後左右に搭載されており,全方位の障害物の検出を行うことができ,後方から接近する人間を認識し,回避することができるため,安全性がより高いことである.また,ATは全方位移動ができるため,突然現れた人間を柔軟に回避することができる点も挙げられる.また,ATは移動体の操縦が難しい高齢者でも移動を支援できるように,自動走行をすることができる.以上の点から,個人用知的移動体ATはAlexらの提案する電動車椅子に対して優位性があると考えられる.
6.2.2 車椅子型自律移動ロボット DREAM号
近い将来訪れる高齢化社会においては,介護者の不足が考えられるため,高齢者や障害者が不自由なく生活するための新しい福祉技術の開発が望まれる.そのような背景で,大北らは車椅子型の自律移動ロボットDREAM号を開発している}.
現在4世代のDREAMが存在する中で,DREAM-3では環境マップという地図情報を取り入れ,タッチパネル等で目的地を指示すればロボットが環境を認識して,目的地まで走行することができる.自律移動電動車椅子が環境を走行する場合に,地図中の車椅子モデルも同時に走行し,走行中に障害物を発見した場合にそれをマップ上に書き込み,車椅子モデルが走行経路を決定し,駆動情報を実機の駆動系に伝える仕組みになっている.また,周囲の環境認識に用いる超音波センサ,自己姿勢角認識に用いるジャイロセンサ,走行用モータシステムを左右輪独立に搭載している.DREAM-4では,危険を察知すると徐行および回避行動をとり,さらに搭乗者の操作法に合わせて学習を行うことで,操作を容易にする特徴を持つ.また,徐行,障害物回避を実現するためにブレーキ機能を含んだファジィ制御システムが導入されている.
本研究とDREAM-3との類似点は,設定した目的地まで自動走行できることである.DREAM-3は自動走行している時に超音波センサで障害物を認識した場合,それをマップに書き込み,回避する手法を取っており,移動障害物には対応していない.ATは障害物回避を行うときに障害物の移動ベクトルを考慮しているため,移動障害物の動きも考慮した回避が可能である.
7 まとめと今後の課題
7.1 まとめ
本研究では,人を乗せて自動走行可能な乗り物である,個人用知的移動体ATの自動走行の効率化を実現するための仕組みを提案し,実現した.
ATは自動走行開始時に,地図に記載されている通行止め情報などを考慮して現在位置と目的地を結ぶ経路を生成し,自動走行中に遭遇した障害物を回避することができる.
しかし,自動走行中に,人が密集する,大きな荷物が床に置かれるなど,ATが障害物回避を試みても回避不能な障害物が一時的に経路上に現れ,その場所が通行止め状態になる場合がある.このような一時的な通行止めの存在は,AT単体では事前に知ることができない.ATに搭載されているセンサは自分の周囲の状態を知ることはできるが,これから走行する予定の経路の状態を知ることはできない.そのため,ATに搭載されているセンサ以外のセンサを用い,そのセンサが得た情報からATがこれから走行する予定の経路の状態を事前に知る仕組みが必要となる.
そこで,本研究では,ATの外部にあるセンサとして,自律走行が可能な小型無人移動体(SUV)を開発した.SUVに環境中を巡回させ,一時的に現れた障害物によって狭められた道を発見した時に,障害物によって塞がれていない部分の道幅を計測し,それを環境情報サーバに送信する.環境情報サーバは,SUVによって収集された道幅と,そこを通過する予定のATの車幅を比較し,通れないと判断した時にATの走行経路を動的に変更する.
SUVの有用性を検証するために2種類の実験を行った.一つ目は,SUVが障害物を発見した場合の道幅の計測誤差を求める実験である.二つ目は,シミュレータを用いたATの自動走行の効率化の検証である.
7.2 今後の課題
7.2.1 SUVの巡回アルゴリズムの改良
現在は,SUVの巡回方法として,自分に割り当てられた巡回経路を走行している時に,交差点に到達した場合,その交差点につながる通路のうち,探索した時間の最も古い経路を優先的に探索するアルゴリズムを採用している.このアルゴリズムに基づいて自分に割り当てられた巡回経路を一巡している.
しかし,SUVは必ずしも一様に巡回経路を探索する必要はなく,確認すべき場所を重点的に探索する方が効率が良いと考えられる.一つの方法としては,SUVはATの走行する予定の通路を環境情報サーバから提供してもらい,ATが走行する経路が,SUVの巡回経路の中に存在した場合,その場所を重点的に探索するということが考えられる.
他にも,緊急車両を定義し,複数の移動体が巡回経路内を走行する予定になっていた場合に,緊急車両が走行する経路を優先的に走行するということも考えられる.つまり,移動体が近い将来に走行する可能性があること,およびその移動体の属性を考慮した巡回方法が考えられる.
7.2.2 シミュレータの機能の強化
本研究で使用したシミュレータは,SUVを利用することによってATの自動走行の効率がどのように変化するかを確認するために開発された. 今回は,情報の流れとしては,SUVから環境サーバを経由してATに送信されるものに限られていた.しかし,SUVが取得した情報を結果的にATの動作に反映させるだけでなく,ATの取得したセンサ情報や,ATの走行経路を基にSUVが行動することも考えられる.これは,7.2.1項でも述べた,ATの走行予定の経路をSUVが重点的に走行するということも含まれる.
他にも,ATとSUV間のやり取りだけでなく,AT同士の情報のやり取りや,自動走行の効率性以外の要素を取り入れることも考えられる.本研究で使用したシミュレータでは,交差点での移動体同士の遭遇について考慮していなかったが,本来ならば,同時に交差点に進入しそうになった時に,どちらが先に交差点に進入するかということを決めておかなければ移動体同士が衝突してしまう.これがATとSUVの組み合わせならば,搭乗者が存在するATが優先的に交差点に進入するようにあらかじめ取り決めることができるが,AT同士だった場合は,どちらが先に交差点に進入するかということを決定するための交渉が必要となる.このように,AT同士のインタラクションをシミュレータに導入する場合は,移動体間の協調に関する問題も考慮しなければならない.
7.2.3 環境設置型センサとの比較
今回は環境設置型センサとの比較実験は行わず,ATに搭載されているセンサのみの場合と,SUVに環境中を巡回させた場合と,完全情報(つまり環境の変化を瞬時にサーバに反映できる)の場合との比較を行った.今後は,SUVと環境設置型センサを利用した場合のATの自動走行の効率性の比較や,同じ環境を網羅するための台数の比較や,コストの比較などを行うことが課題である.
また,SUVのみを使用する,環境設置型センサのみを使用するのではなく,各センサの得意な環境の条件や状況を比較実験によって推定し,SUVと環境設置型センサを同じ環境で共存させた場合に,ATの自動走行の効率性が,SUVのみ,環境設置型センサのみを使用した場合とどのように異なるかということについても調べる必要がある.
7.2.4 空中用小型無人移動体の導入
現在,研究に用いているSUVは地上を走行するものである.このSUVを地上用小型無人移動体と呼ぶ.地上を走行するということは,歩行者やATと移動領域を共有しているということである.つまり,歩行者やATの移動の邪魔になってしまう可能性がある.また,SUVは小型であるゆえ,高い段差を越えることができない.他にも,道が完全に塞がっていた場合に,その向こう側を巡回できないという欠点が存在する.そこで,私が所属する研究室では,空を飛ぶSUVを開発中である.我々はこれを空中用小型無人移動体と呼んでいる.

図7.1: 地上用小型無人移動体から飛び立つ空中用小型無人移動体
現在想定している運用方法としては,基本的に空中用小型無人移動体は地上用小型無人移動体の上で待機しており,探索が必要だと判断した時に空中用小型無人移動体を飛翔させ,環境探索を行わせる.地上用は空中用を着陸させ,充電する機能を持つ(地上用は自力で充電のための場所に移動する).図は,地上用小型無人移動体から飛び立つ空中用小型無人移動体の様子である.
空中から環境探索を行うことで,交差点などにおいても歩行者やATと衝突する危険性がなくなる.また,段差を越えることもでき,通路が完全に塞がっていたとしてもその上を越えて障害物の向こう側の探索を行うこともできる.
謝辞
本研究を進めるにあたり,指導教官である長尾確教授,松原茂樹准教授,大平茂輝助教には,研究に対する姿勢や心構えといった基本的な考え方から,ゼミ等を通しての研究に関する貴重なご意見,また,論文執筆に関するご指導を頂くなど,大変お世話になりました.心より御礼申し上げます.
土田貴裕さん,石戸谷顕太朗さんには,研究活動における様々な助言を頂いたり,論文の添削をして頂くなど,大変お世話になりました.ありがとうございました.
ATプロジェクトのメンバーである渡辺賢さんには,様々な場面で協力して頂きました.ありがとうございました.
森直史さん,木内啓輔さん,山本圭介さんには,研究に関する相談に乗って頂いたり,プログラミングのアドバイスを頂くなど,日々の研究室の活動の中で大変お世話になりました.ありがとうございました.
高橋勲さん,磯貝邦昭さん,棚瀬達央さんにはゼミ等で貴重なご意見を頂きました.ありがとうございました.
ATプロジェクトのOBである尾崎宏樹さん,安田知加さん,岸佳奈恵さんには,研究室在籍中に大変お世話になりました.ありがとうございました.
長尾研究室秘書の鈴木美苗さん,土井ひとみさんには,学生生活ならびに研究活動のために様々なサポートを頂きました.ありがとうございました.
最後に,日々の生活を支えてくださった家族に最大限の感謝の気持ちをここに表します.ありがとうございました.