
小型無人移動体との連携による個人用知的移動体の安全自動走行
概要
我々の研究室では,個人用知的移動体AT(AttentiveTownvehicle)と呼ばれる,搭乗者の行きたい場所まで自動で移動する個人用の乗り物の研究・開発を行っている.自動走行する移動体の問題の一つは搭乗者の安全性である.この問題に対して移動体自身が持つセンサーでは十分に対処できないため,いかに環境側に周囲の情報を収集し伝達する仕組みを実現するか,ということが重要となる.そこで本研究では,自律走行可能な小型無人移動体(Small Unmanned Vehicle)をATの拡張センサーとして用いることでこの問題を解決した.具体的には,ATが走行する経路上で,死角等があり特に走行に注意するべき場所を自動で検出し,その場所に小型無人移動体が自律的に移動し,ATの代わりに周囲の状況をセンシングすることで,ATの安全自動走行を実現した.さらに,その妥当性を示すためにその要素技術の評価を行った.
1 はじめに
我々の研究室では,個人用知的移動体AT(Attentive Townvehicle)と呼ばれる,搭乗者の行きたい場所まで自動で移動する個人用の乗り物の研究・開発を行っている.移動体の自動走行に関する最大の課題は,その移動体が歩行者などの移動障害物に接触・衝突することなく安全に目的地まで到着することである.障害物回避をしながら,自動走行をする移動体に関しては多くの研究が行われているが,そのほとんどは,次のようなプロセスに沿って行われている.(1)移動障害物を認識して,その移動ベクトルを求め,自身との衝突の可能性を評価する.(2)衝突の可能性の高い移動障害物に対して回避方向を決定し,その方向に移動する.しかし,これは移動障害物の認識から衝突まで十分な時間がある場合,例えば正面から近づいて来る移動障害物とのすれ違いなどは解決できるが,移動体の死角から接近する移動障害物との衝突を回避することは困難である.その理由は,移動体に装備されたセンサーで移動障害物を検出してから衝突するまでの時間が非常に短いためである.特に高い安全性が求められる自動走行可能な乗り物にとって,この問題を解決することは必要不可欠である.
この問題に対して,見通しの悪い交差点などに移動障害物の接近を感知して表示するデバイスを設置する手法や,音情報に基づいて物陰の人物認識を行う手法が提案されてきた.前者の手法は環境に網羅的にデバイスを設置することを前提としているが,その実現にかかるコストが非常に高いと考えられる.また,後者の手法は音が入り乱れている環境での誤認識が問題となる.そこで本研究では,自律走行可能な小型無人移動体(SUV: Small Unmanned Vehicle)をATの拡張センサーとして用いることでこの問題を解決する手法を提案する.具体的には,ATが走行する経路上で,死角等があり特に走行に注意するべき場所を自動的に検出し,その場所に小型無人移動体が自律的に移動し,ATの代わりに周囲の状況をセンシングすることで,ATの安全自動走行を可能にする.なお,本研究の提案手法は,従来研究において提案された,環境にセンサーを設置する手法と対立するものとは考えておらず,SUVは環境中に存在する移動型のセンサーとして,環境に設置されたセンサーと共存させることが可能である.SUVを用いることで,環境に設置されたセンサーの検出範囲外の領域も安全に走行することが可能になると考えられる.本研
本研究では,これまで解決が困難であった問題に対して新たな手法を提案し,それを実機によって実現し,有効性を確認した.本研究成果の評価としては,本来ならば,提案手法を用いることで,従来手法に比べて安全性がどの程度向上したかを分析するべきだが,安全性を定量的に評価することは困難であるため,その手法を構成する各要素技術に関して精度の評価を行い,提案手法が十分に妥当であることを示す.
ちなみに,本論文では,自動走行(automatic run)という言葉を,人が乗る移動体が自動制御で走行すること(任意のタイミングで手動制御に切り替えられる)として用い,自律走行(autonomous run)という言葉を,移動ロボットなどが完全自律的に目的地まで走行することとして用いる.
2 個人用知的移動体AT
ATは移動体に情報処理・通信機能を持たせ,人間の物理的な移動と情報処理を連動させることにより,人間の移動をより便利にするための乗り物である(図).その機能の一つとして,搭乗者がATに搭載されたタッチパネルディスプレイから目的地を入力することで,自動で目的地まで移動する機能がある.この機能は3章で説明する小型無人移動体と同様の方法で実現しており,まとめて4章で説明する.
また,ATには移動障害物を検出するためにレーザーレンジセンサーが搭載されている.レーザーレンジセンサーは物体にレーザー光をあて,その反射光を受光して物体までの距離を算出し,これを一定角度間隔で測定するもので,これによって,平面上でのセンサーから物体までの距離を知ることができる.ATはこれを前後左右の4箇所に搭載し,その情報を統合することで全方位の障害物情報を調べることができる.
われわれは過去にこのセンサーを用いた移動障害物の回避についての研究を行った.この研究での,移動障害物の回避方法は,次の通りである.まず,連続的に取得した複数のセンシング情報が最もよく重なる変換行列をICP (Iterative Closest Point)マッチングで求める.ICPマッチングは複数の距離データ間で重複して計測された部分を利用して,繰返し計算により誤差を最小化する変換行列を求める手法である.次に,求めた変換行列でセンサー情報を重ねあわせ,重なりのずれが大きな点を移動障害物とし,その障害物の位置の変化から移動障害物の移動ベクトルを計算する.それがATと衝突する可能性がある場合に,メカナムホイール(車輪に小型の補助輪を組み合わせた複合車輪)を用いた全方位移動によって回避する,という手法であった.図はAT が認識した移動障害物の図である.この図の青い四角が ATを表し,ピンクの図形が移動障害物の位置と向きを表している.
しかし,1章で述べたように,AT自身に搭載されたセンサーでは,交差点の左右の通路などの死角から接近する移動障害物を,十分に回避が可能なタイミングで検出することはできない.この問題は,ATのような自動走行をする乗り物を一般に普及させるためには,必ず解決すべき問題である.そこで本研究では,ATのような乗り物がより確実に安全に自動走行を行うことを目標とし,死角から接近する移動障害物を適切に回避するという問題を,次章で説明する小型無人移動体を用いて解決する.

図1: ATの構成
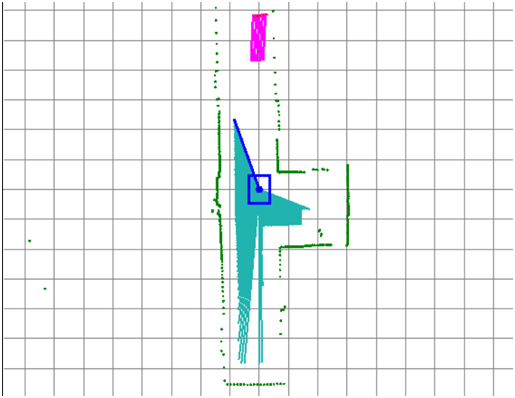
図2: レンジセンサーによる障害物情報の取得
3 小型無人移動体(SUV)
この章ではSUVの機能の概要について説明する.SUVの外観は図のようになっており,対向二輪型の移動機構を持つiRobot CreateにPCとレンジセンサーとKinect[ ]と呼ばれるデバイスを搭載した構成となっている.KinectはRGBカメラに加えて,カメラから物体までの距離が計測できる深度センサーを持つデバイスである.平面上の障害物までの距離が計測できるレンジセンサーと異なり,物体の形状認識に適しているため,特に歩行者の認識に適している.これについては6.3節で説明する.前章で説明したATとSUVは無線通信機能によって相互に位置などの情報を伝達し合うことができる.その利用方法については後述する.
1章で説明した通り,SUVはATの拡張センサーとして機能するデバイスである.ATの拡張センサーとして機能するために要求される仕様は次の3点である.
-
指定された目的地まで正確に自律走行を行う.
-
ATが走行する経路上に,死角などのために特に注意するべき区間を検出する.
-
移動障害物を発見してATに伝達する.
1についてはATとほぼ同じ手法を用いており4章で説明する.2の検出方法については5章で説明する.3については6.3節と6.4節で説明する.

図3: SUVの構成
4 自律走行
ATとSUVは指定した目的地に対して自律的に移動する仕組みを必要とする.この仕組みは移動ロボットの基本的な機能として数多く研究されており,その多くは次の4つのステップの実現を主な課題としている.
-
環境地図生成
-
自己位置推定
-
経路生成
-
経路を走行するための駆動系の制御
1はATとSUVが環境を認識するために事前に作っておく地図であり,2は作られた環境地図上で現在の自分の姿勢(位置と向き)を推定する機能で,3は指定された目的地まで環境地図上のどこを走るかを決定する機能である.4は生成した経路を実際に走行するための制御方法である.それぞれのステップに関して様々な手法が提案されているが,本章ではATとSUVに実装した手法について説明する.1に関しては,既存の手法を本研究の目的に合うように組み合わせて適用した.2に関しては既存手法に若干の変更を加えている.また,3の環境地図から走行経路を自動生成する仕組みは,本研究で新たに考案したものである.4については,ATとSUVはそれぞれ移動機構が異なり,本論文においては特に重要ではないため,説明を省略する.
なお,ATはこれまで自己位置推定のために,位置情報を記録したRFID (Radio Frequency Identifiction)タグを壁に貼り付け,走行中にそれを読み取るという手法を採用していた.しかし,そのやり方ではRFIDの読み取り位置によって最大1m程度の測位誤差が発生してしまう.その場合,本研究の提案手法の主要な機能である移動体間の連携が困難であるため,位置推定手法を改善する必要があった.
4.1 環境地図生成
現在地を把握し,目的地を決定し,その場所まで自律走行するためには走行する環境の地図が必要である.本研究では,地図生成の対象となる実環境でSUVを手動操作で走行させ,レーザーレンジセンサーの計測記録から2次元の占有格子地図を生成する.本節では,この占有格子地図の生成手法について説明する.
占有格子地図とは,等間隔の格子に配置された確率変数で表現される地図のことであり,確率変数の値が高いほどその領域が物体によって占められている可能性が高いことを意味する.占有格子地図の求め方は次の通りである.
占有格子地図を表す確率変数の行列(行列の要素は0から1の実数値)を,時刻0から
までの姿勢の列を表す
(={
})と,センサーの計測値
から求める.姿勢
は,時刻
での位置
と向き
を表す.センサーの計測値
は時刻
におけるセンサーのレンジ内の障害物までの距離(単位はmm)と,センサーから障害物への方向(単位はラジアン)を表すベクトルの組である.最も確からしい
を求めるためには,すべての
の可能性について
を計算し,尤度が最大となる
を求めればよい.しかし,すべての
について を求めることは計算量的に不可能であるので,
の点
における確率変数を
とし,
と近似することで,各格子の確率変数値を推定する問題に分解する.レンジセンサーの値からを求める方法は参考文献のアルゴリズムを使用した.このアルゴリズムはセンサーと姿勢の誤差に強く,誤差があった場合も障害物がある地点では1に収束,ない地点は0に収束しやすい.センサーの値
と姿勢
には誤差が含まれるため,誤差に強いこのアルゴリズムを使用した.
実際に計測したデータから地図を求める手法について説明する.各時刻において,尤度が最大となる姿勢を探索し,その姿勢において地図を更新していく.具体的な手順として,SUVを走行させることによって得られるオドメトリ情報と,レンジセンサーの情報
から以下の方法で求める.なお,オドメトリ情報とはタイヤの回転角度から推定する移動体の相対的な移動量(前回の位置からの移動距離と前回の向きとの角度変化分のベクトル)である.
-
の初期値として,全ての要素に未知を意味する0と1の間の値を代入する.なお,多くの環境地図では,障害物が存在する領域の面積より障害物が存在しない領域の面積の方が大きいため,ここでの値を0.5より0に近い値にする方が収束しやすい.
-
地図作成時の出発地点
を原点として,
を求める.
-
ICPアルゴリズムにより
が最大となる
を探索する.
-
3で求めた
を求め,
以上の手法を用いて生成された占有格子地図の例を図に示す.画像の各画素の色の濃さが占有格子地図の各格子の確率変数の値の大きさを表す.黒は障害物有り,白は障害物無し,灰色が初期状態を表している.各格子の間隔は50mm, SUVが300mm進むごとに記録したデータに基づいて作成した.なお,文献によれば,適切な間隔は経験的に150mm程度であることが述べられている.これ以上間隔を大きくすると,位置推定の精度が下がり,間隔を小さくすると,環境地図のサイズが大きくなり,実時間での計算が困難になるためである.本研究では屋内の環境地図を作るため若干状況が異なる.屋内は屋外に比べ道幅が狭いため,より正確な現在位置を把握する必要がある.現在位置の精度は環境地図の格子の間隔に依存するため,現在位置の精度を高めるために格子の間隔を50mmとした.また,図の環境地図上の壁などの長さと実際の測量結果との差は平均で10.3cmであった.
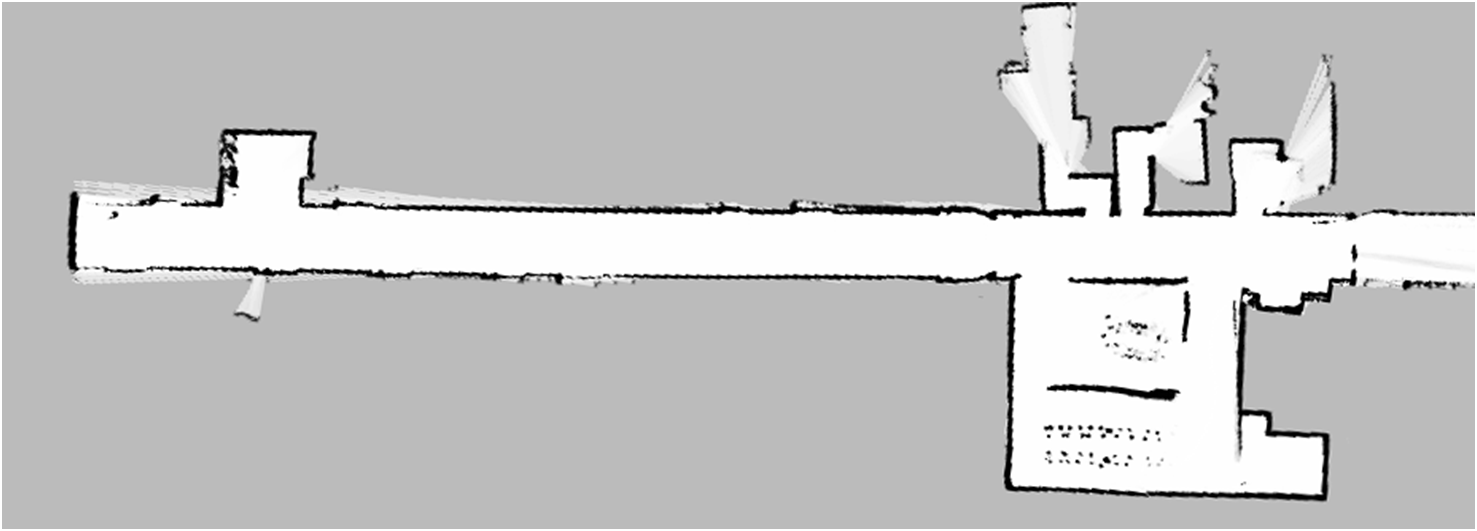
図4: 生成された占有格子地図の例
4.2 自己位置推定
ここでの自己位置推定とは,前節で生成した地図と現在のレンジセンサーの値を比較することで,環境地図上での位置を推定する機能である.4.1節で説明した地図生成のアルゴリズムのステップ3のように,ある時刻において
が最大になるような
を求めるという点では,自己位置推定は地図生成と同じである.しかし,自己位置推定時には地図を更新する必要がないため,ここでは
の精度は特に重要ではない.それよりも,地図生成時と比べて,物の配置が若干変化した状態などでも一定の誤差以内で
を推定できる仕組みの方が重要である.そのため,確率的に位置を推定していくパーティクルフィルタを,自己位置推定に用いた.パーティクルフィルタは確率的シミュレーション(推定したい確率変数に誤差を加えることで発散させ,尤度を計算することで収束させる手法)によるベイズモデルの推定法の一種である.一つのパーティクルを自己位置とし,尤度をその位置でのセンサーデータと環境地図のマッチング度とする.マッチング度はセンサーの値のそれぞれについて最近傍の障害物までの距離の和とする.そして,リサンプリング時には,尤度の高いパーティクルに対して,ガウス分布で近似した誤差を含めたオドメトリで自己位置を更新することで,パーティクルフィルタを用いた位置推定を実現した.また,パーティクルの分布の平均を現在位置とした.最尤の自己位置を一意に決めるICPとは異なり,パーティクルの分布から自己位置を決めるので,多少の誤差はあるが,動的に障害物の位置が変化する実環境においては,よりロバストな手法になっている.
前述したように,SUVとATはお互いの位置を相互に伝達することが可能である.そのため,レンジセンサーから取得した値のうちATまたはSUVの付近の値は移動障害物と見なし,そのデータを位置推定において地図とのマッチングには用いない仕組みを導入した.
ここでの位置推定は,地図の更新が行われないことと実時間で推定する必要があることから,誤差を小さくすることよりも処理速度とロバスト性を上げることが求められる.処理速度を上げるためにレンジセンサーの分解能を15度に設定し,ロバスト性を上げるためにパーティクルを多めの500個用意した.1回の位置推定にかかる処理時間は10msec以下(CPUはCore i7 2.80GHz)で,これを1秒間に4回繰り返すことで,オドメトリの誤差に対してロバストな位置推定を行うことができた.図は1週ごとの出発地点との位置の誤差を表しており,図は位置推定のあり・なしでの軌跡を表している.
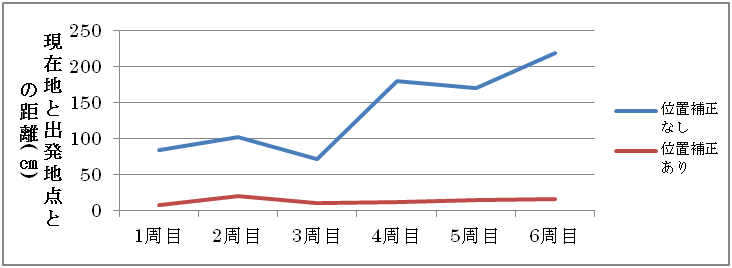
図5: 周回後の現在地情報と出発地点との距離
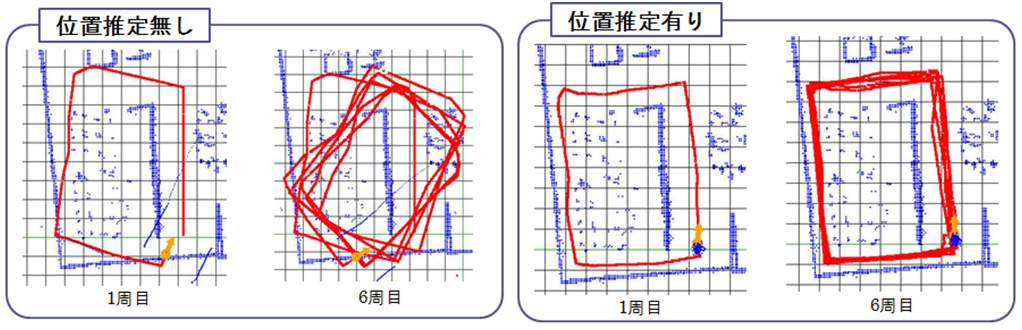
図6: 位置推定あり・なしの場合のそれぞれの移動軌跡
4.3 経路生成
前節で説明したように,ATとSUVは環境地図上で自己位置を一定の誤差内で推定することができる.本節では自己位置から指定された任意の座標に対して走行可能な経路を生成する方法を説明する.
環境地図に用いた占有格子地図は地図上の格子ごとにその場所が物体に占められている確率を表現している.その値が一定の閾値以下である領域を走行可能領域として,走行可能領域に経路生成のためのグラフ構造データを自動で生成する.その生成手法は,次の通りである.まず,図の黒い線で表されている障害物から一定距離内の領域を塗りつぶし,その境界線にノードを一定間隔で追加する.さらに,障害物から一定距離外の領域を塗りつぶし,その境界線にも同様にノードを追加する.図の点はこの手法で生成されたノードである.生成されたそれぞれのノードについて一定距離内にあるノードをつなげることによってグラフ構造データを作る.図は生成されたグラフ構造データを表している.
次にこのグラフ構造データから経路を生成する手法を説明する.環境地図の走行可能領域内の任意の場所が目的地として指定された時,現在地と目的地のそれぞれの最近傍のノード間をA*アルゴリズムで探索することで経路を生成する.A*はダイクストラ法による推定値が小さいものから順に探索し,経路が見つかった時点で探索を終了するアルゴリズムであるこのアルゴリズムは目的地までの推定値をユークリッド距離とすることで最短経路を探索できることが保証されている.図に生成された経路を示す.
また,占有格子地図上では通行可能な領域ではあるが,人間の都合によって移動体に通って欲しくない場所や,地図作成後に障害物が置かれたことによって通行不可能となる場所が存在する場合が考えられる.これに対しては,前者は環境地図生成システムのGUI上から簡単に手動でグラフ構造データを編集できる機能,後者はレンジセンサーから取得した値と地図の間で不整合が生じた際にグラフ構造データを更新する機能を用意することで,柔軟な経路生成を可能とした.
なお,環境地図の格子をそのままグラフとしてA*アルゴリズムを適用して経路を生成することは可能である.しかし,ATは動的にSUVに経路情報を送信する必要があり,環境地図の格子より粒度の荒い単純なグラフ構造を生成して通信量を減らす必要があるため,環境地図からグラフ構造データを生成する手法を本研究で新たに提案した.
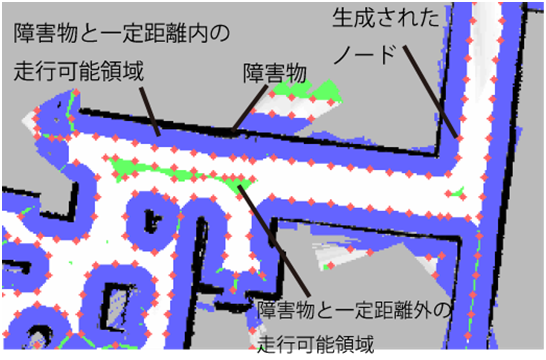
図7: 地図上の障害物とその境界線
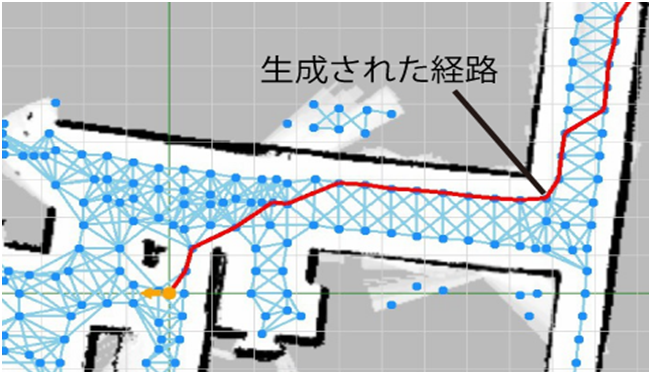
図8: 地図に付与されたグラフ構造データと生成された経路
4.4 自律走行の精度
本章で説明した仕組みでSUVが正しく自律走行が可能かどうかを実験によって検証した.ここで検証したいことは,壁などの障害物にぶつかることなく自律走行が安定して行えるかと,自律走行によって,実際にSUVが到着した場所と設定した目的地の間にどの程度のずれがあるかである.地図を生成した時の出発地点は,常に地図上の原点になる.つまり,出発地点と地図上の原点の対応関係は正確である.地図上の原点を目標地点に設定し,実際にSUVが到着した地点との差を計測することで自律走行の精度を確認した.さらに,自律走行の安定性を確認するために,目標地点に至る経路上に別の目標地点を複数設定し,障害物とぶつかることなくその地点に到着できるかどうかを調べた.以下に実験手順を示す.
-
実環境に目印を付けた地点からSUVをマニュアル操作で走らせ,環境地図を生成した.この実験で作成された地図の走行可能な領域の広さは約11m×9mであった.前述のように,目印を付けた地点は環境地図上での原点と対応している.図のオレンジ色の矢印で表される地点が環境地図の原点である.
-
1で目印を付けた地点にSUVを置く.図の7つの緑の四角のエリアから,SUVがランダムに一ヵ所を選択し,目的地とする.目的地に向かってSUVを自律走行させた.自律走行には1で生成した地図を用いた.目的地には60cm×60cmの四角をテープで作ってあり,自律走行が終わった時点で,その四角の領域にSUVが入っているかどうかで,自律走行が適切に行われたかを評価した.SUVの大きさは直径34cmであり,今回の実験での速度は300mm/secである.目的地の領域のサイズについては,環境地図生成と自己位置推定の誤算を考慮して,1辺の長さをSUVの直径の約2倍の60cmとした.
-
自律走行が完了したら,その場所から2と同様の手順で次の目的地を選択し,再び自律走行を開始させた.
-
合計5回の自律走行が行われた後,地図上の原点に向かって自律走行を開始させた.到着後に,1で目印を付けた地点と到着地点のずれを,目的地と実際の到着地点の誤差として記録した.
-
2から4の手順を10回行った.
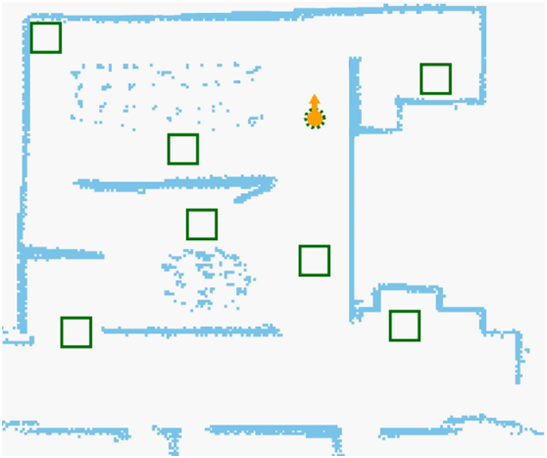
図9: 自律走行の目的地候補エリア
実験手順4の目的地と到着地点の誤差の結果を表に示す.環境地図上で設定された目的地に,最大で15.1cm,平均で7.0cmの誤差で到着できることが分かった.この誤差は,目的地へ到着したと判断するのに十分な値だと考えられる.この実験から,SUVが人間の指定した目的地に精度良く到着できることが確認できた.
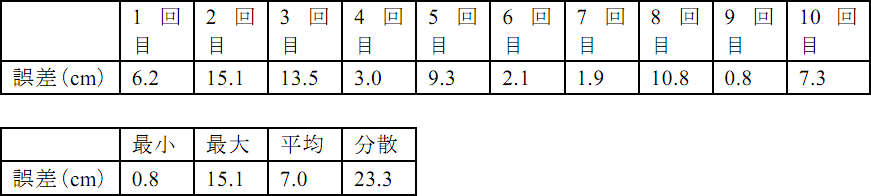
図10: 目的地と到着地点の誤差
また,実験手順2,3の結果を表に示す.四角の領域に完全にSUVが入った回数は44回であり,SUVが枠線から一部はみ出している回数は6回あったが,いずれもSUVの中心は枠内であった.また,自律走行の失敗を四角の領域に完全にはみ出した場合,あるいは自律走行中に壁などにぶつかって自律走行を中断した場合としたが,そのようなケースは一度もなかった.この結果からSUVは安定して自律走行できることが実証された.
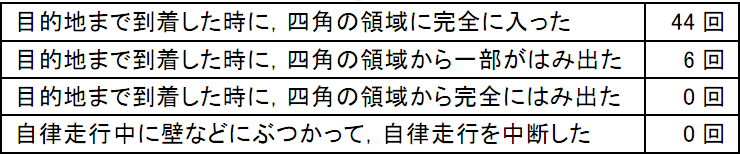
図11: 自律走行の検証結果
5 注意区間の検出
注意区間とは,ある経路上を走行する際に,進行方向前方の視野外から接近する移動障害物と衝突する可能性がある場合,それを回避するために特に注意を払う必要がある,経路上の区間を指す.直感的な説明をすれば,自動車を運転する際に建物などで視野が制限され危険を感じる場所を,徐行して走行する区間とほぼ同義である.
1章で説明した通り,SUVをATの拡張センサーとして用いてATの安全性を向上させるためには,ATが自動走行する際に通る経路上の注意区間にSUVを先行させ,ATの死角となる領域を前もってセンシングする必要がある.そのため,本章では,この注意区間を4.1節で説明した環境地図から自動的に検出する手法を説明する.なお,環境地図から注意区間を検出する手法は従来研究が存在せず,本研究で新たに提案されたものである.さらに,本研究では,その手法の精度を被験者実験によって検証した.
5.1 注意区間の検出手法
注意区間はその定義の性質上,移動体の状態・性質によって判断基準が変わってくる.そこで,事前に6名の被験者にATに搭乗してもらい,二つの経路を手動操作で走行する過程において,各自の判断で注意区間を決定してもらう予備実験を行った.その結果を調査して注意区間を分析したところ,次のような傾向が見られた.
-
左右の,初めて視認できる(つまり,移動体がセンシングできる)領域が急増する区間において注意区間が発生する傾向がある.
-
初めてセンシングした領域について,移動体とより近い領域の増加分を重要視する傾向がある.
以上を考慮した結果,注意区間の検出手法は次のようになった.
ある経路をN個の区間に分割し,番目の区間の開始点を走行するときの姿勢を
とする.
は
番目の区間の開始点の座標で,
は
においての経路の接線の角度に等しい.この経路情報と環境地図を入力として,経路上の全ての注意区間を出力とする検出アルゴリズムを図に示す.注意区間は経路上の二点間の区間であり,その二点を出発地点に近い順で並べたもので表される.図の閾値αは,予備実験のデータに基づいて試行錯誤的に決めた.
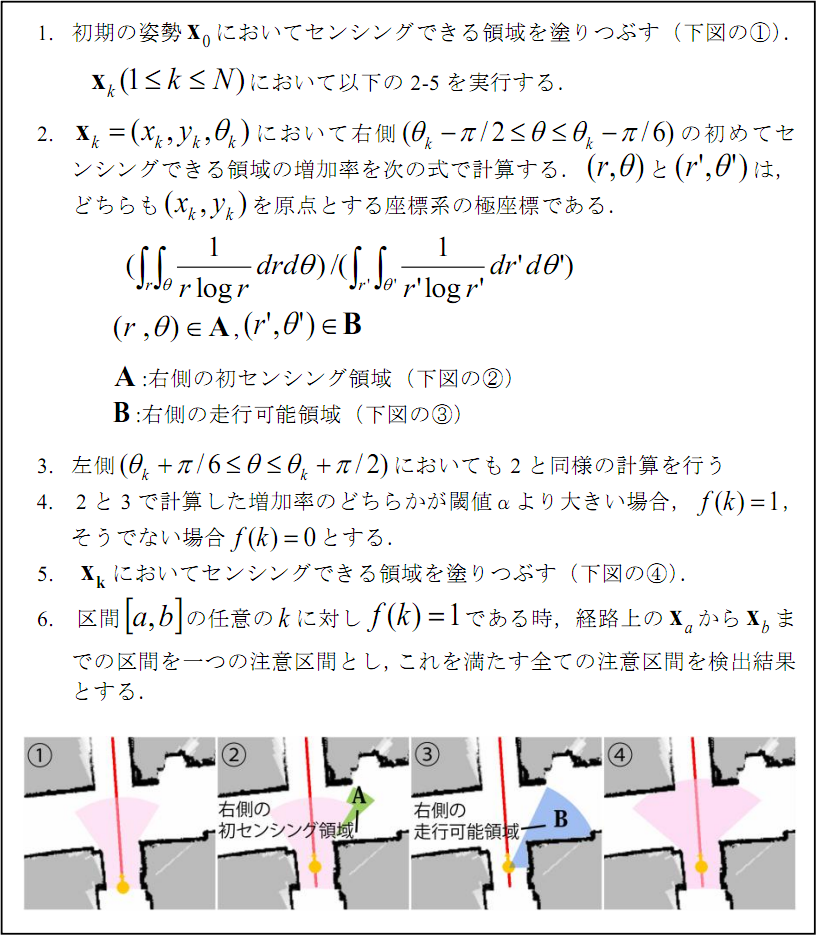
図12: 注意区間の検出アルゴリズム
以上の手順で検出された注意区間の例を図に示す.また,同じ図に図の手順2,3で計算した左右の領域増加率のグラフを示す.破線のグラフが右の領域増加率で実線が左の領域増加率である.検出された注意区間と対応するグラフの場所で,増加率が高くなっているのが分かる.出発地点近くの経路上で左の領域増加率が閾値に達せず,注意区間と判断されていない場所があるが,図の下図?のAの領域にあたる部分が経路から離れているためだと考えられる.次節で,以上の検出手法で正しく注意区間を検出できるかどうか検証する.
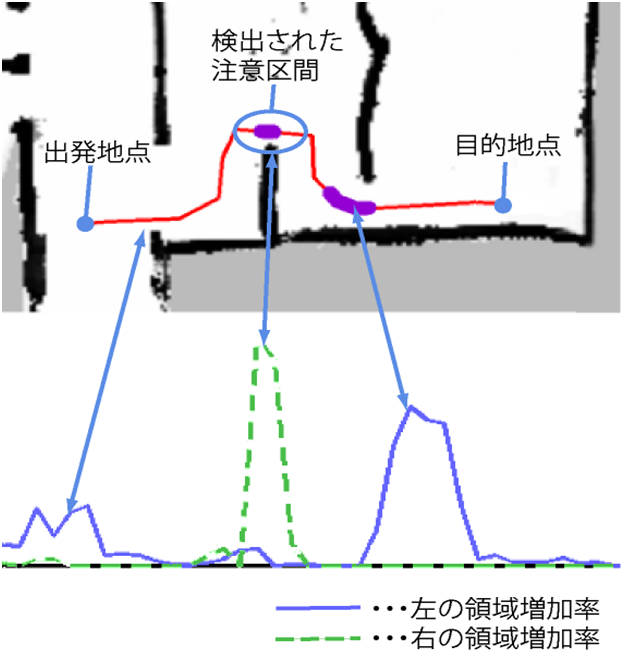
図13: 注意区間の検出結果
5.2 注意区間検出精度の評価
4.1節で述べた手法で生成された環境地図から,適切に注意区間が検出できるかを被験者実験によって検証した.注意区間は,ATが自動走行する経路を手動操作で走行したときに,その搭乗者によって判断することは容易であると思われる.そのため,予備実験と同様に,学生3名に協力してもらい,正解となる注意区間を決定した.まず,事前に注意区間の定義について説明し,その上でATが自動走行する複数の経路を手動操作で走行して,注意区間を指定してもらった.次に,被験者に指定したもらった注意区間と環境地図上の領域を対応付けた.そして,それぞれの経路に関して,3名の指定した領域を足し合わせたものを正解データとした.予備実験によって,一つの経路について学生6名の指定した注意区間がほぼ一致したことを確認し,多少の個人差があった場合も3名程度の人間がいれば注意区間を網羅的に抽出するのに十分であると判断したため,正解データを作成するための被験者数を3名とした.また,実験には,複数の注意区間が含まれると考えられる10種類の経路を用いた.経路の長さの平均は約18mである.実験で使用した経路の一つを図に示す.この図の経路を通る際の注意区間の正解データは4区間であった.この経路において,前節で説明したアルゴリズムで検出した注意区間を図に示す.正解データとの比較において,正解データと検出結果の注意区間の中心のずれが50cm以内である場合を一致として扱った.図と図を比較すると,検出結果の1箇所を除く区間は正解データと一致している.10経路すべてに関して,正解データと検出結果を比較したところ表のような結果になった.誤検出してしまった区間の原因の一つとして,地形情報を占有格子地図で適切に表現できない場所であったことが挙げられる.具体的には,すきまのある上り階段がある場所である.地図上では壁があるように見えるが,実際には見通しが効く場所であったため,誤検出してしまった.地形を平面地図で適切に表現できない場所では,本研究の手法が必ずしも有効に機能しないことは,今後解決すべき課題の一つである.
この実験結果から,十分な精度で注意区間を検出できることを確認した.本章の冒頭で説明したように,本研究で検出したい注意区間は,SUVがATの安全のために先回りし,注意して走りながら周辺を探査する区間である.SUVは無人の移動体であるため,注意区間を多めにとって速度を急激に変化させても特に問題はない.また,この場合,適合率よりも再現率の方が重要であり,適合率88.8%は許容できると考えられる.
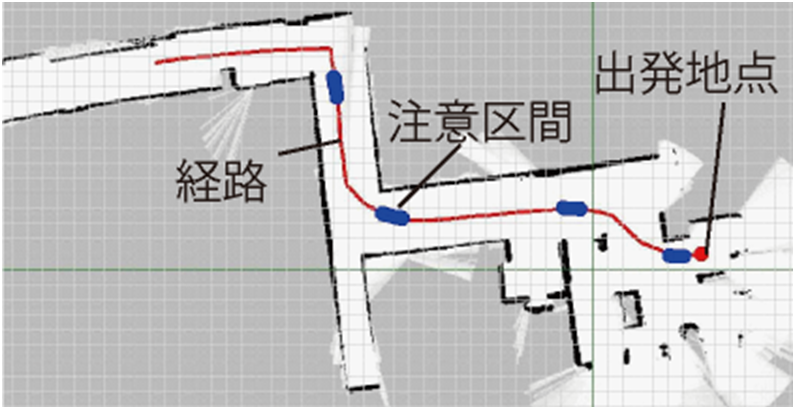
図14: 使用した経路とその注意区間
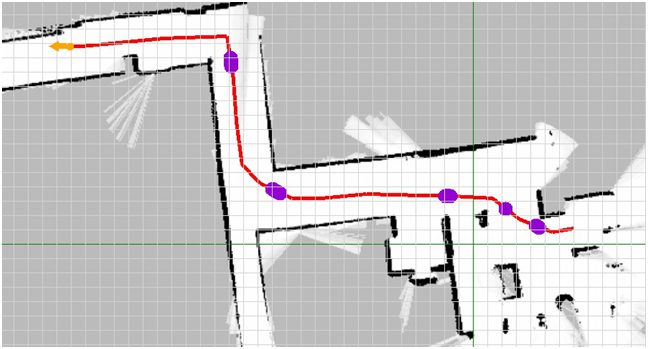
図15: 使用した経路とその検出結果
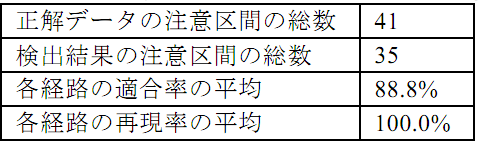
図16: 検出精度の実験結果
6 SUVとATの連携による安全自動走行
本章では,前章までの仕組みを利用して,SUVとATが連携して走行する手法と,連携によってATの安全性を向上させる仕組みについて説明する.
6.1 SUVによるATのセンシング領域の拡張
SUVによってATが安全に自動走行するためには,まずSUVのセンシング情報をATのセンシング情報と統合する必要がある.この仕組みとして4.1 節で生成した環境地図上で,ATとSUVはそれぞれ自身の現在の位置と向きを4.2節で説明した仕組みで推定し,SUVは現在位置と向きおよびセンシング情報をATに常時送信する.これによりATは,SUVのセンシング情報を自身のセンシング情報と統合することができる.この仕組みによって,統合されたセンシング情報を図に示す.これは,ATのタッチパネルディスプレイから見ることができる情報で,搭乗者は常に,ATとSUVのそれぞれのセンシングした情報を同時にモニターすることができる.図の中央の,「地図にない障害物情報」というラベルが示すセンサー情報は,SUVのみがセンシングした情報である.このように,ATのセンサーの死角になっている領域をセンシングできていることが分かる.
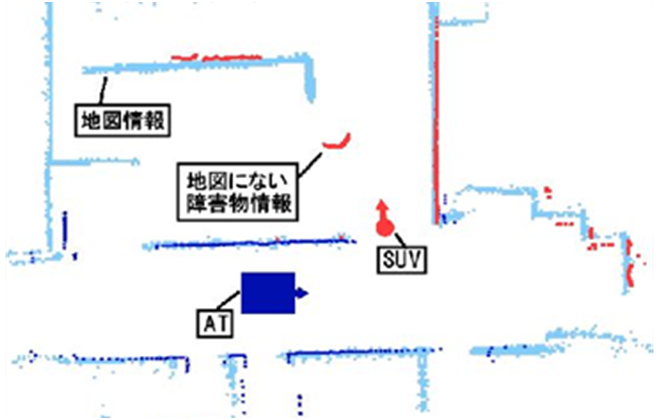
図17: SUVによるATのセンシング領域の拡張
6.2 SUVとATの連携自動走行
ATの搭乗者がタッチパネルディスプレイにより目的地を入力すると,ATは4.3節で説明した方法で経路を生成し,その経路をSUVに送信する.走行経路を共有することにより,ATとSUVは同時に同じ経路の走行を開始する.このとき,ATと SUVの間隔が離れ過ぎたり,近づき過ぎたりしないように速度を制御する必要がある.ATとSUVは4.2節で説明した自己位置推定の仕組みにより,共通の地図上で自分の現在地を知ることができる.SUV は現在地を常にATに送信し,ATは自分とSUVの距離を計算する.その距離が近すぎる場合はATが自動走行を一時停止し,距離が遠すぎる場合はSUVの自律走行を一時停止する命令を送信する.これによって,一定間隔を保ちながらの連携走行が可能になる.
6.3 移動障害物の検出
次節で説明する安全走行の仕組みにおいて,SUVは移動障害物を検出する機能を持つ必要がある.本節では,移動障害物を検出する仕組みについて簡単に説明し,その検出精度について述べる.SUVはレンジセンサーとKinectを同時に用いて移動障害物の検出を行う.レンジセンサーによる障害物検出手法は,センサーの値と地図を比較することで地図にない障害物を一定時間ごとに発見し,この情報からオプティカルフローを用いることで,動いている障害物を検出するというものである.一方,Kinectは距離画像に基づいて人間を検出する機能を有しているので,それを用いて静止しているか動いているかに関わらず人間を検出する.静止している人間を検出するのは,それがいつ動き出すか予測できないので早めに注意を向けるためである.また,レンジセンサーとKinectによる距離情報を用いて移動障害物の位置を更新する.さらに,移動障害物の位置の軌跡からその移動方向を計算する.レンジセンサーは検出距離が長いが,検出した障害物が人間であるかどうかは判別できず,人間の場合はそれが移動を開始して初めて対応できる.一方,Kinectは検出距離が短いが静止している人間も検出できる.このため,レンジセンサーとKinectを併用することで,より確実に移動障害物(特に人間)を検出できる.ここでは,検出時点で静止している人間も移動障害物と見なしている.
この仕組みによる移動障害物の検出精度について述べる.様々な状況下における,レンジセンサーとKinectのそれぞれの移動障害物の検出率についての実験結果を表に示す.状況1は,注意区間100箇所において,移動障害物を誤検出した確率である.概ね誤検出をしないことが分かったが,Kinectが1度誤検出していることが分かる.しかし,Kinectで移動障害物(人間)が誤検出されても,その位置が変化しない.次節で説明する安全走行の仕組みにおいては,移動障害物の移動方向を考慮するため,特に問題はない.
状況2と3は,人が移動せずに立っている状況での移動障害物の検出率である.レンジセンサーでは,障害物が動かないため検出率は0%となったが,Kinectは静止した人をある程度の精度で検出できることが分かった.
状況4と5は,人が移動している状況での移動障害物の検出率である.次節で説明する安全走行の仕組みにおいては,人が近づいてくる場合の検出率が重要であり,レンジセンサーとKinectのそれぞれで,かなり高い精度で近づいてくる人を検出できることが分かった.
レンジセンサーとKinectの移動障害物の誤検出率と検出率から,衝突の危険性を感知することに関してSUVが十分な性能を有していることが確認された.
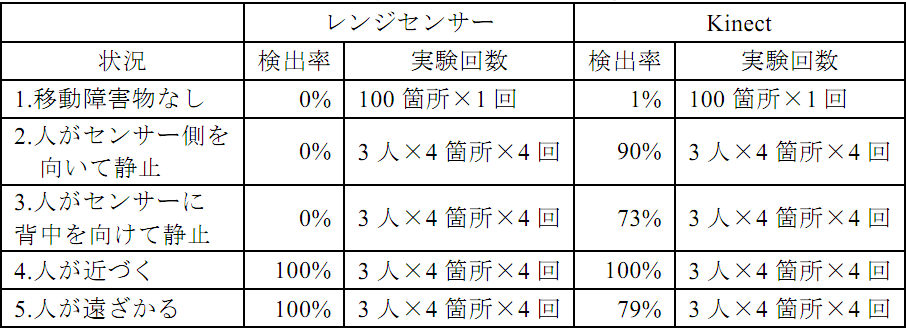
図18: 移動障害物の検出精度
また,検出精度が高くても移動障害物を検出した位置が近過ぎる場合は,次節で説明する安全自動走行の仕組みにおいて問題があるため,検出時のSUVと移動障害物の距離についても評価を行った.注意区間1箇所において,人が近づいてくる状況で,レンジセンサーとKinectのそれぞれの移動障害物検出時の移動障害物とSUVの距離をヒストグラムで示したのが図と図である.それぞれ100回試行した.レンジセンサーとKinectの平均検出距離はそれぞれ,7.0m,5.9mであった.どちらもほぼ安定した距離で検出できることが図と図から分かる.
また,SUVの移動障害物検出は,レンジセンサーとKinectのどちらかが先に検出した結果を採用する.そのときの距離をSUVの移動障害物検出距離とすると,今回の実験において,その距離は6.0mであった.これは,人間の歩く速度を4km/hとすれば,歩いて近づいてくる人間と衝突まで5.4秒かかる距離である.今回使用したSUVの最大速度は500mm/secであり,5.4秒で2.7m動けることになる.これより,上記の距離は障害物との衝突を回避するためには十分であると考えられる.
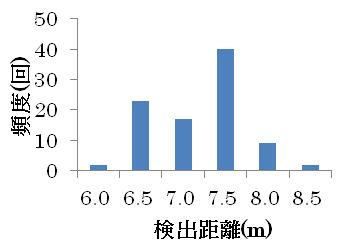
図19: レンジセンサーの検出距離
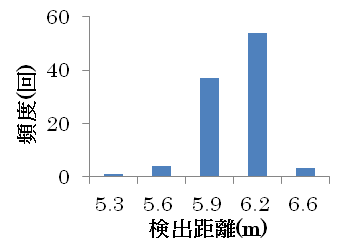
図20: Kinectの検出距離
6.4 注意区間を考慮した安全走行
SUVは5章で説明した仕組みで,ATがこれから走行する経路の注意区間を検出することができる.SUVはATよりも速い速度で自律走行を行い,注意区間の始点に差し掛かったときに速度を落とし,移動障害物の出現に備える.さらに注意区間の終点に着くと完全に停止し,ATが一定距離内に近づくまでATのセンサーの死角から接近する移動障害物を前節の仕組みで検出する.接近する移動障害物を確認した場合,SUVは経路を逆に進むことで移動障害物と衝突しない位置に回避し,移動障害物が通りすぎるのを待つ.同時にATにも移動障害物を検出したことを伝える.移動障害物が現れないときはATが近づいてきたらSUVは次の注意区間まで移動を再開する.図はATとの連携走行中にSUVが注意区間を発見しその場所で停止している様子とそのときのコンソール画面を示している.SUVはATの死角を補完する位置で停止し,その位置から移動障害物の情報を送るため,ATが移動障害物の発見の遅れによって,それと衝突することは避けられる.
注意区間で停止したSUVは十分な精度で,接近する移動障害物を検出する必要があるが,前節の実験から検出精度は十分に高く,また検出時に障害物との間にそれを回避するのに十分な距離が存在することが分かった. 図は図で示した注意区間でSUVが移動障害物を検出した時のKinectのカメラおよび深度センサーの画像とATのコンソール画面を示している.移動障害物の位置を表すピクトグラムを地図上に表示している.
SUVを用いたATの安全な自動走行の仕組みは,ATから見えない(つまりATのセンサーで検知できない)領域から接近する移動障害物を早めに検出し,ぶつからないように停止するという動作を行いながら目的地に移動するというものである.単純ではあるが,移動障害物同士の衝突の多くはお互いがお互いを認識することなく移動し続けた場合に発生する.SUVを用いたこの仕組みは,移動障害物の発見を早め,移動を停止することができるため,衝突の危険性を大幅に低減させることができると考えられる.
ところで,SUVが行う回避行動,つまり注意区間で一旦停止し,移動障害物を見つけたときに後退して回避する動作をAT自身が行えば,死角から接近する障害物との衝突を回避し安全に走行することが原理的には可能である.しかし,ATのような人間が乗る乗り物が見通しの悪い注意区間の全てにおいて一旦停止し,移動障害物を見つけたときに急速度で回避する動作を行うことは搭乗者の乗り心地を著しく悪化させる.自動走行は人間が普通に歩くよりも安心して移動できる仕組みを実現する必要があるため,経路上の危険な領域をSUVが事前に探索する本研究の仕組みは有効であると考えられる.
ここで提案したATの安全自動走行の仕組みの妥当性は,要素技術の精度によってある程度示すことが可能である.例えば,ATとSUVの位置推定の精度は4.2節で示した通りであり,自律走行の精度は4.4節,注意区間検出の精度は5.2節,移動障害物の検出精度は6.3節で示した通りである.センシング領域の拡張と連携自動走行は,要素技術の組み合わせで実現されるため,それら要素技術の精度が十分であれば,十分な精度で実行できる.これより,SUVを用いたATの安全自動走行は妥当な手法であると思われるが,実験環境の複雑さのために,その手法全体の精度を確認するには至っていない.この精度を厳密に調べるため,またSUVが注意区間に到着するタイミングによって障害物と衝突する可能性や,その他の予期せぬ事態が起こりうるかどうかを調査するためには,要素技術の精度をパラメータとし,屋内の様々な環境を忠実に再現できるシミュレータを開発して実験を行うべきであるが,これについては今後の課題である.
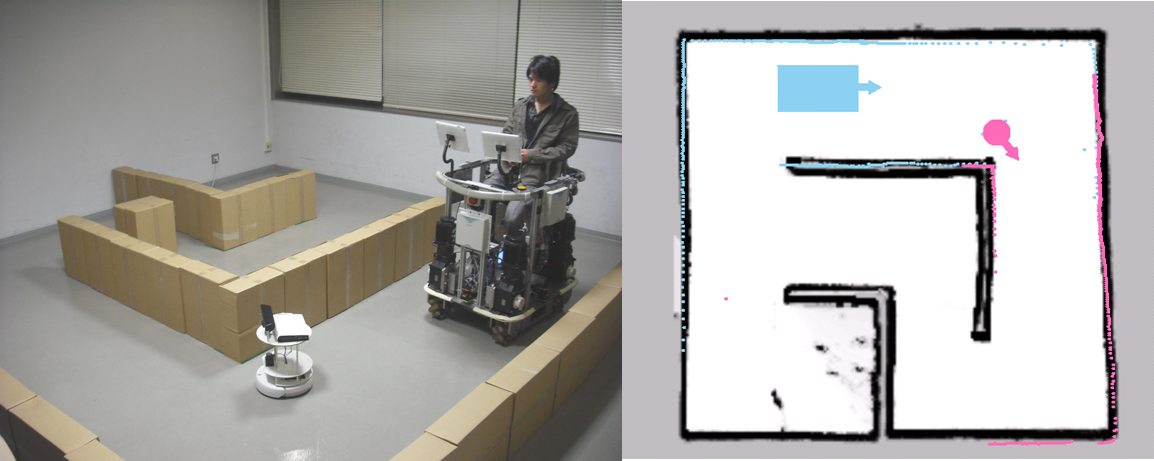
図21: 注意区間で停止するSUVとその時のATのコンソール画面
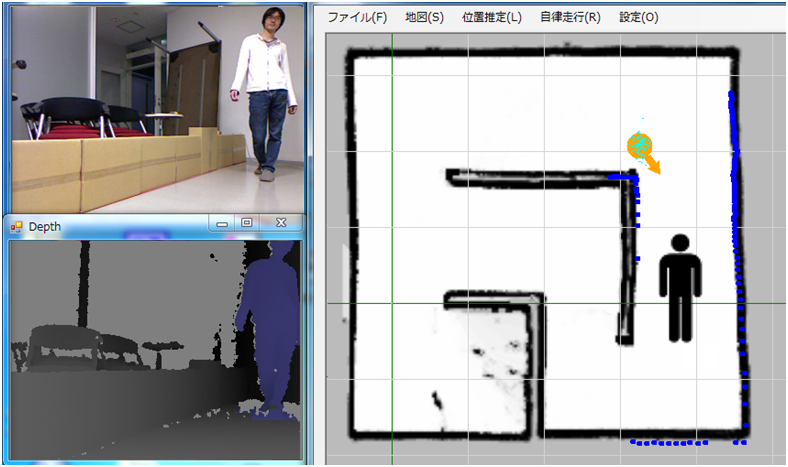
図22: SUVの移動障害物の認識
7 おわりに
本研究では,個人用知的移動体をいかに安全に自動走行させるか,という問題に対して,小型無人移動体を先行させ障害物を探索させるという仕組みを提案し,実機で実現可能であることを確認した.この仕組みを実現するために必要なSUVの機能として,注意区間を自動的に検出する手法を新たに提案し,高い精度で検出できることを被験者実験によって確認した.提案手法によって,SUVは検出した注意区間にATより先に到着し障害物を探査することができ,その結果,ATは死角から接近する移動障害物との衝突を回避することができる.
また,提案手法を実機で動作させたことにより,1章で述べた従来手法では得られない新たな知見が被験者実験によって確認された.それは,本研究の手法を用いることで,搭乗者が安心して移動体に乗っていられる,ということである.たとえ,壁の向こうの死角となっている領域に人がいないことを機械が認識し,その情報をモニターなどを通じて搭乗者にフィードバックしても,搭乗者の不安は必ずしも軽減されないだろう.また,搭乗者の恐怖感は,移動体がより高速になるほど増大するだろう.それは,自分の乗る自動車が一時停止せずに見通しの悪い交差点を高速で通り過ぎる様子を想像すれば理解できるだろう.一方,本研究において,SUVが注意区間ごとに一時停止する様子を観察しながら移動することによって,搭乗者に安心感を与えていることが被験者のコメントから確認できた.このように,SUVが実際に目の前を走ることにより,搭乗者は安心して,後続する移動体に乗っていられるといった効果が副次的に得られることが分かった.
SUVとATの連携走行によるデメリットの一つは,ATが単独で走るよりも交通状況を複雑化してしまうことである.これは,SUVは現在の大きさでは交通の邪魔になる可能性があるためで,将来的にはSUVを野球のボール程度のサイズに小型化することでこの問題を発生しにくくすることができるだろう.そのため,SUVをより実用的な仕組みにするためには,SUVをさらに小型化することも検討すべきであり,それも今後の課題の一つである.
SUVは,ATのような自動走行可能な乗り物以外とも,組み合わせて利用することが可能である.具体的には,セグウェイなどの自動走行機能を持たない乗り物をSUVが通信によって制御し,その乗り物を仮想的に牽引することによって,局所的な自動走行を実現することや,人間が徒歩でSUVの後ろを付いていくような案内システムへの応用などが考えられる.今後はそのような応用の研究も行っていく予定である.
謝辞
本論文に対して有益なコメントをくださった査読者の方々,ならびに本研究の実験の被験者となっていただいた名古屋大学長尾研究室の皆様に感謝いたします.
尚,本研究は科研費MEXT/JSPS(21300051)の助成を受けたものである.